Задание движения твердого тела. Поступательное движение твердого тела. Теорема о траекториях, скоростях и ускорениях точек тела при поступательном движении.
Существует пять видов движения твердого тела:
поступательное движение;
вращение вокруг неподвижной оси (вращательное);
плоскопараллельное движение;
вращение вокруг неподвижной точки(сферическое);
свободное движение.
Первые два называются простейшими движениями твердого тела:
Для задания движения твердого тела нужно определить положение всех его точек в системе отсчета. Однако у тела бесконечное число точек и, на первый взгляд, задать его движение невозможно, так как требуется бесконечное число параметров. Следовательно, определив положение трех точек твердого тела, не лежащих на одной прямой, можно определить положение всех его точек в системе отсчета.
Таким образом, для задания движения твердого тела нужно определить положение только трех его точек, не лежащих на одной прямой, а кинематической моделью твердого тела будет треугольник, построенный по трем этим точкам.
![]()
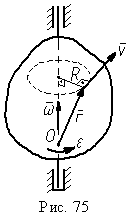
Вращательное движение тела вокруг неподвижной оси. Уравнение вращения. Угловая скорость и угловое ускорение. Векторное представление угловой скорости и углового ускорения.
![]()
![]()

![]()



Представим
угловую скорость вектором, модуль
которого равен величине угловой скорости,
направленным по оси вращения так, что
с его конца вращение тела наблюдается
против хода часов.
То есть вектор угловой скорости будет
одновременно определять величину
угловой скорости
![]() ,
направление вращения и саму ось вращения.
Вектором
углового ускорения будет производная
по времени от вектора угловой скорости:
,
направление вращения и саму ось вращения.
Вектором
углового ускорения будет производная
по времени от вектора угловой скорости:
![]()
Так как ось вращения неподвижна, вектор угловой скорости не меняет своего направления, изменяясь только по модулю, то при вращении тела вокруг неподвижной оси вектор углового ускорения направлен по оси вращения. По направлению он совпадает с вектором угловой скорости, когда вращение ускоренное, при замедленном вращении векторы направлены в разные стороны.
Скорость и ускорение произвольной точки вращающегося тела.



Формулы Эйлера для скорости и ускорения произвольной точки вращающегося тела.



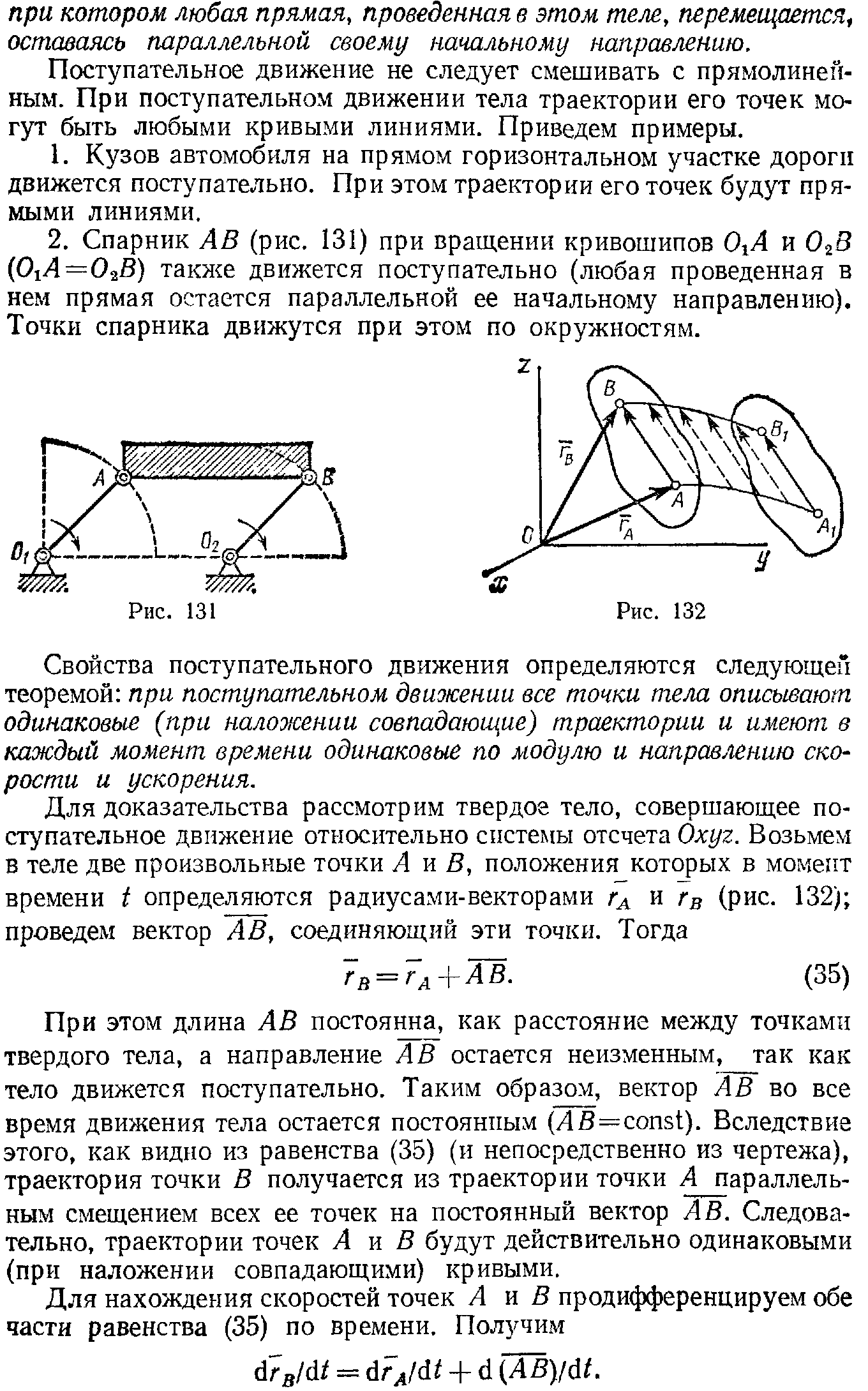
Плоское движение твердого тела и движение плоской фигуры в своей плоскости. Уравнения плоского движения тела.



![]()

![]()
Определение скорости произвольной точки плоской фигуры. Теорема о сложении скоростей при плоском движении. Теорема о проекциях скоростей двух точек.


Мгновенный центр скоростей (МЦС). Способы определения положения МЦС.




Определение скорости произвольной точки тела с помощью МЦС.



Понятие о мгновенном центре ускорений.


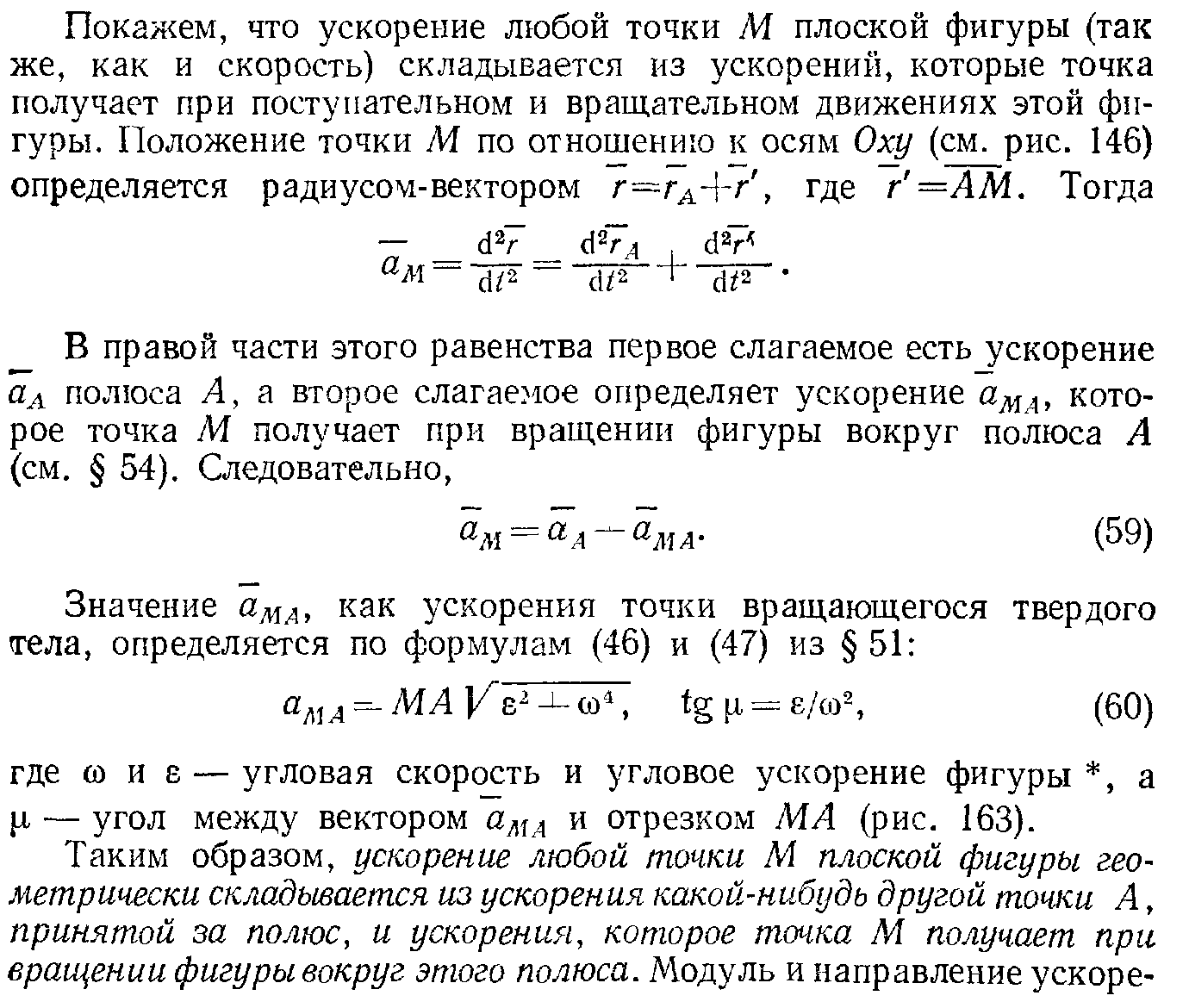
Определение ускорения произвольной точки плоской фигуры. Теорема о сложении ускорений при плоском движении.