Сложное движение точки. Теорема о сложении скоростей при сложном движении точки.
В простейшем случае сложное движение точки состоит из относительного и переносного движений. Определим эти движения.
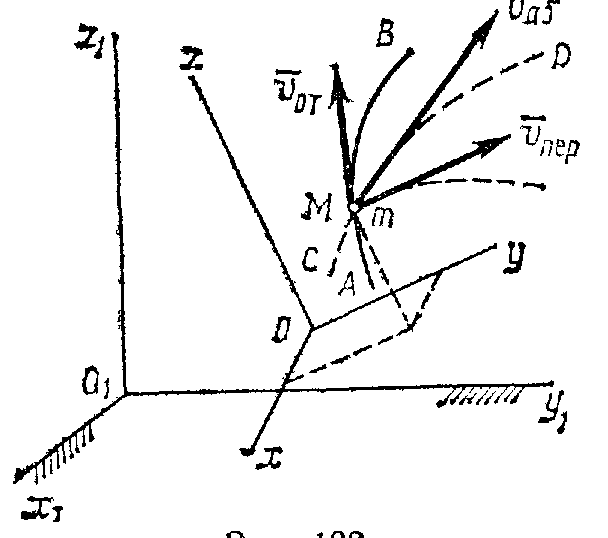
Рассмотрим две системы отсчета движущиеся друг относительно друга. Одну систему отсчета O1x1y1z1 примем за основную и неподвижную. Вторая система отсчета Oxyz будет двигаться относительно первой.
Движение точки относительно подвижной системы отсчета Oxyz называется относительным. Характеристики этого движения, такие как, траектория, скорость и ускорение, называются относительными. Их обозначают индексом r.
Движение точки относительно основной неподвижной системы отсчета O1x1y1z1называется абсолютным (или сложным). Траектория, скорость и ускорение этого движения называются абсолютными.
Переносное движение – движение подвижной системы отсчета относительно неподвижной. Обозначается индексом е.
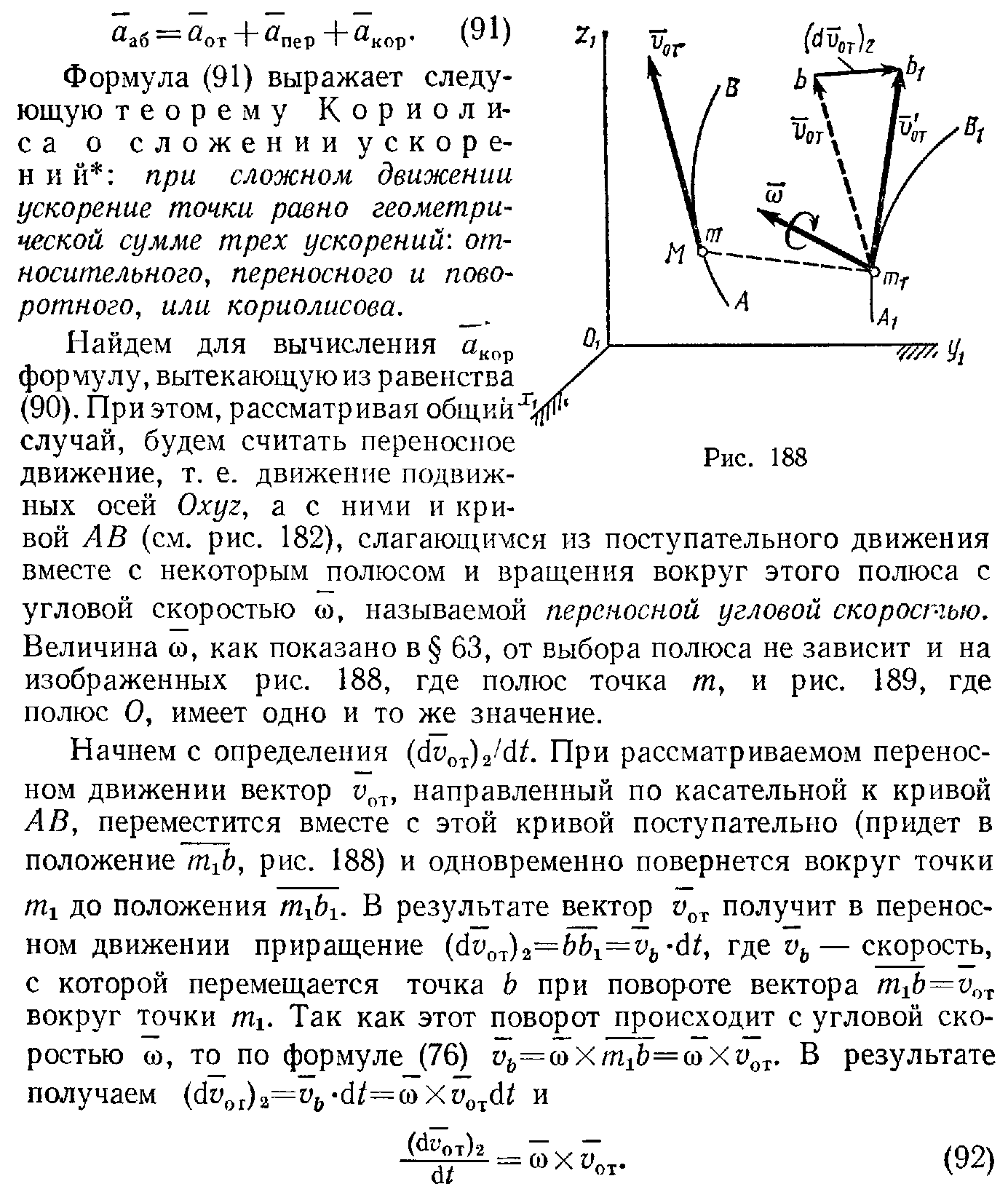
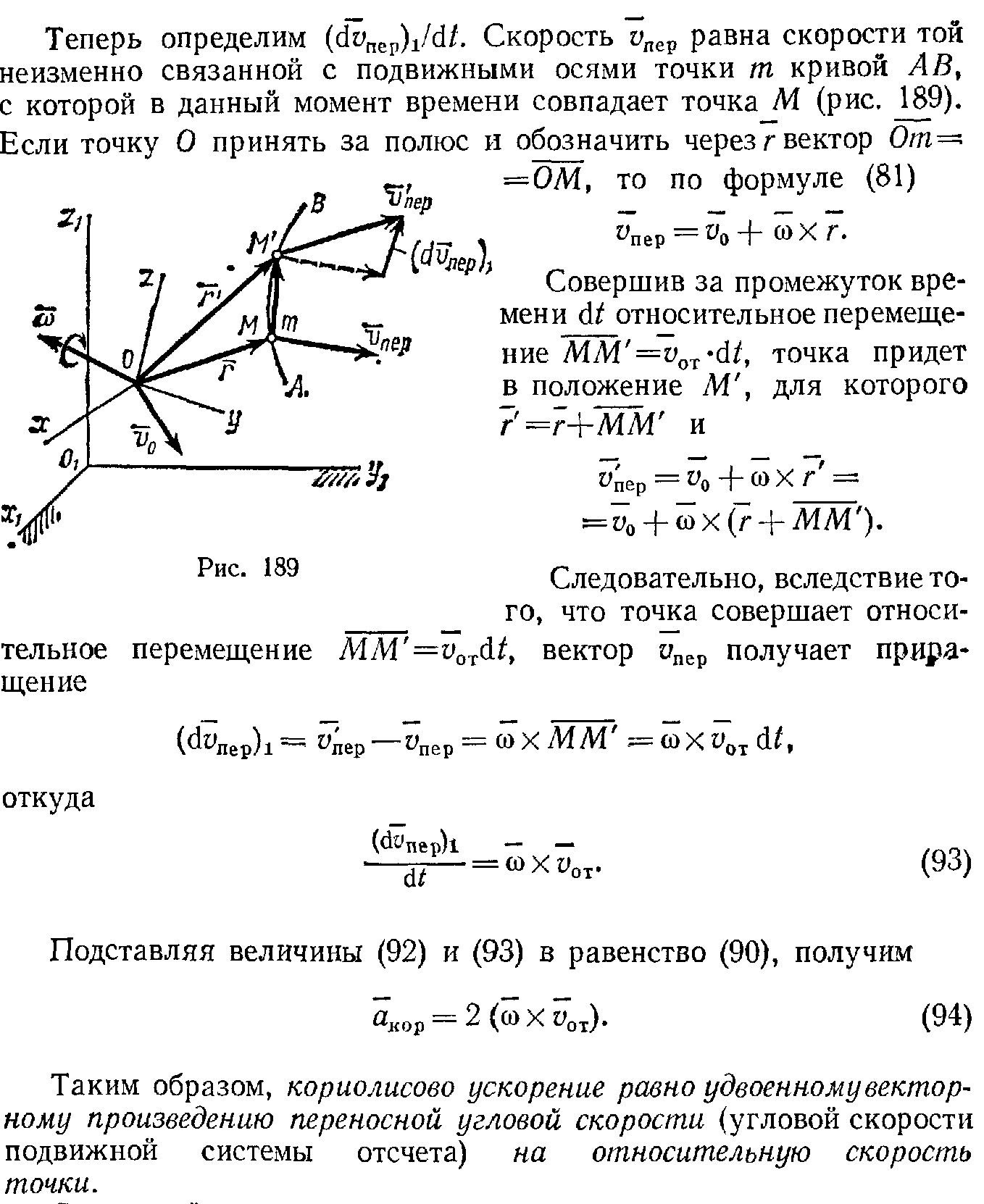
Сложное движение точки. Теорема о сложении ускорений при сложном движении точки.
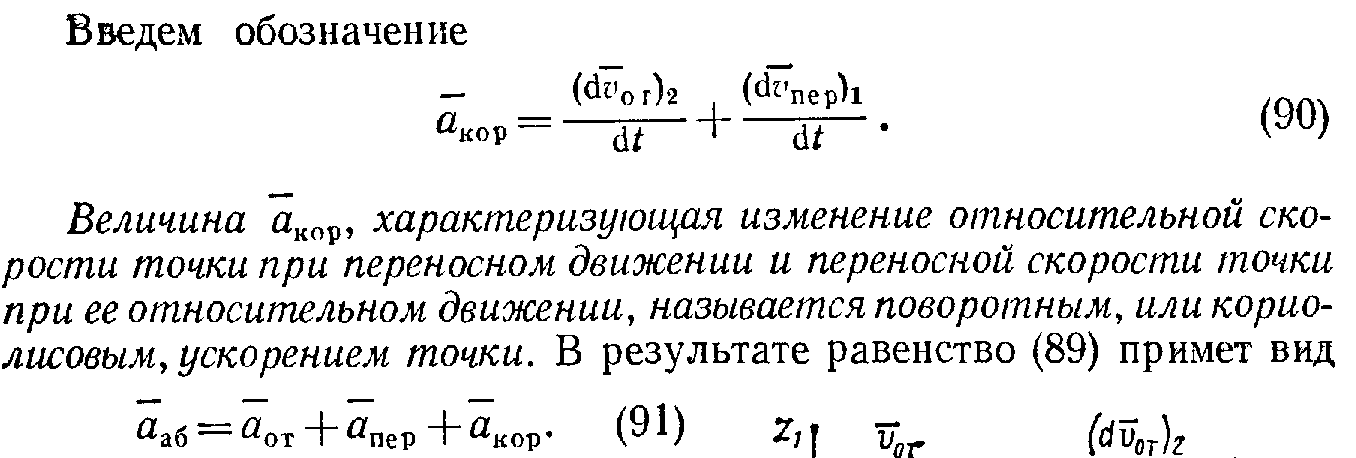
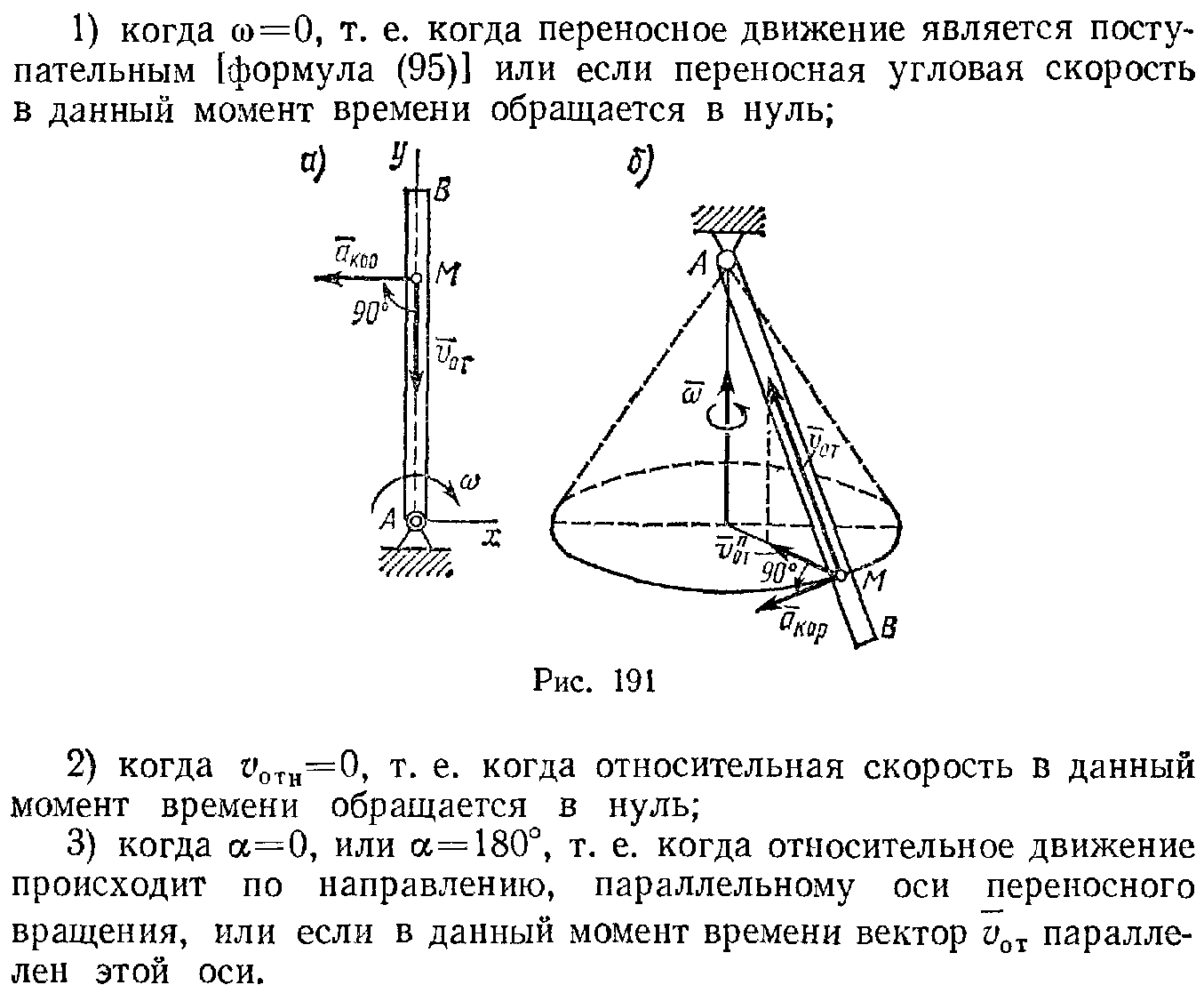
Ускорение Кориолиса. Случай равенства нулю кориолисова ускорения.
![]()
Движение твердого тела вокруг неподвижной точки (сферическое движение). Углы Эйлера. Уравнения движения. Сферическое движение (движение твёрдого тела вокруг неподвижной точки) — движение абсолютно твёрдого тела, при котором оно имеет одну неподвижную точку. При движении вокруг неподвижной точки О каждая из точек твёрдого тела описывает в пространстве сферическую поверхность, центром которой является точка О.
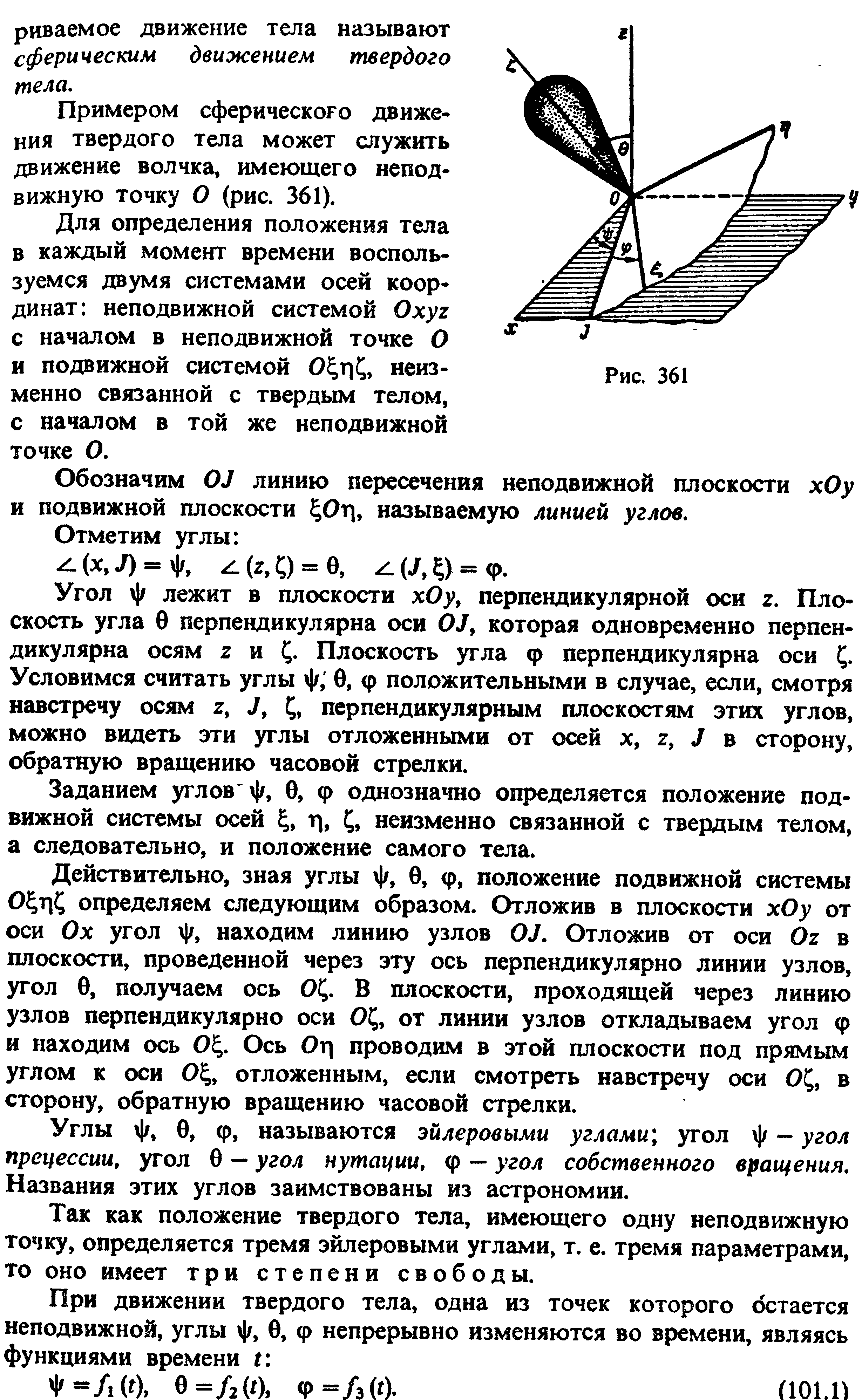
Мгновенная ось вращения. Векторы угловой скорости и углового ускорения. Скорость произвольной точки тела (без доказательства).
![]()

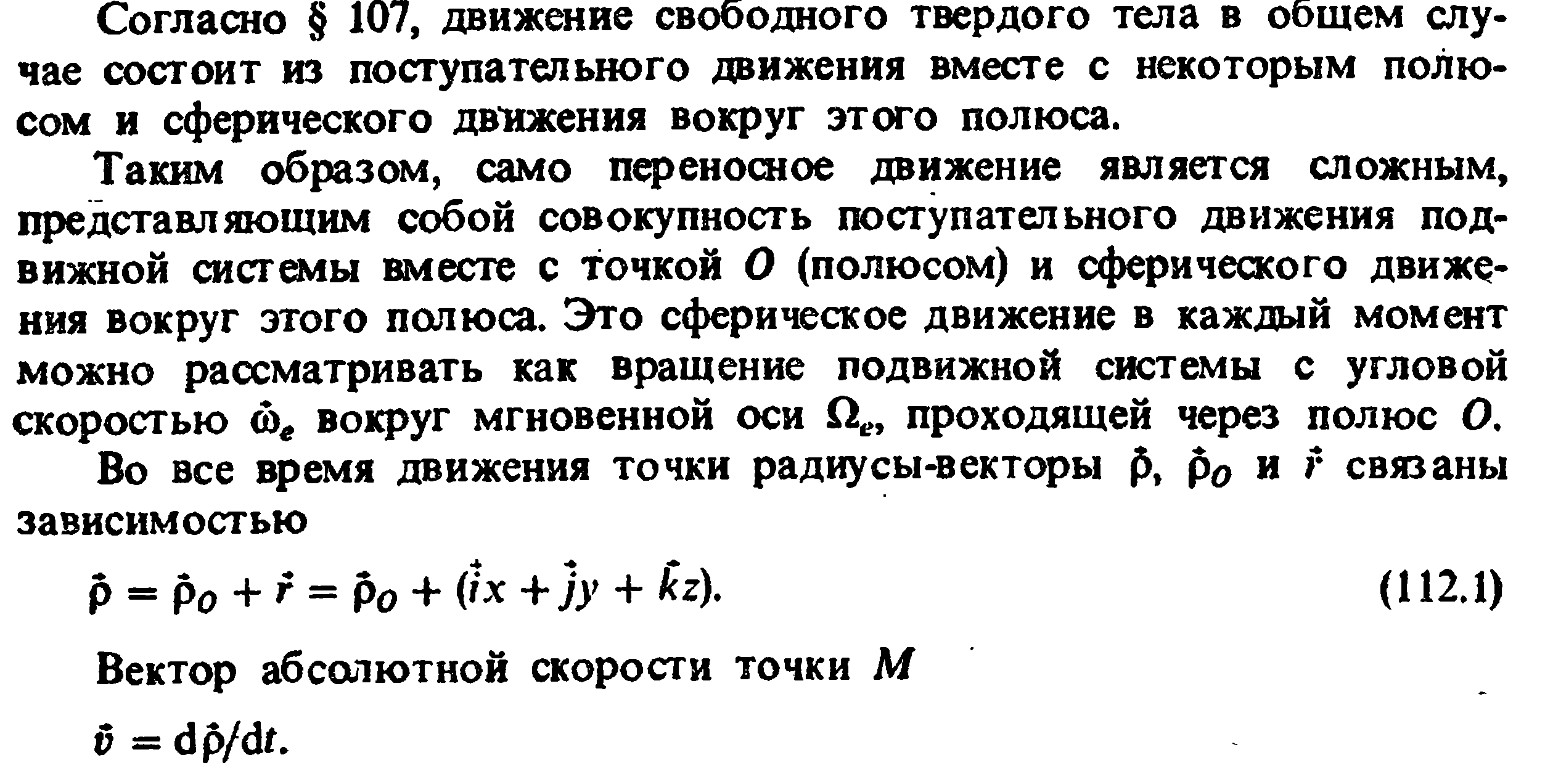
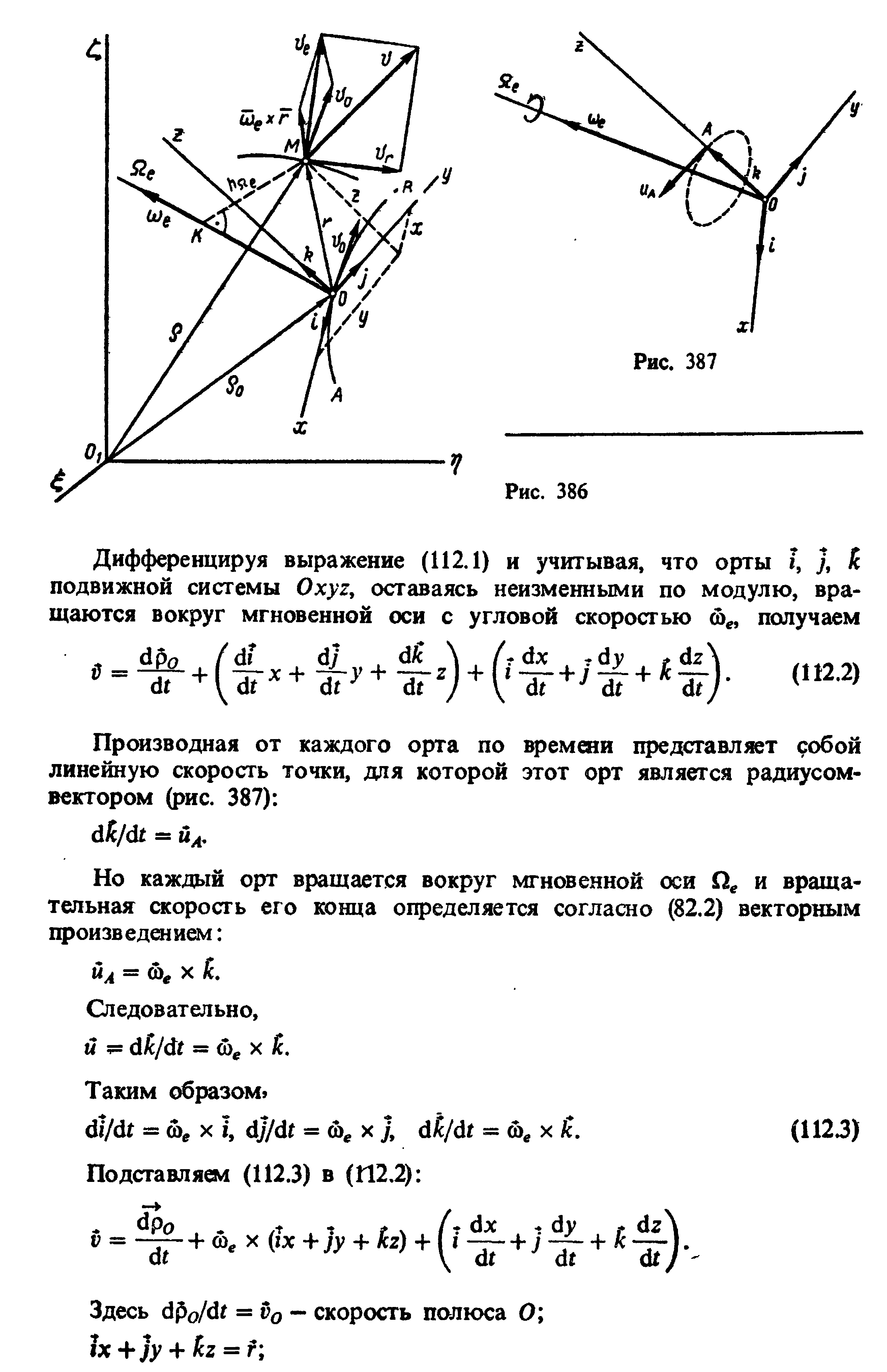
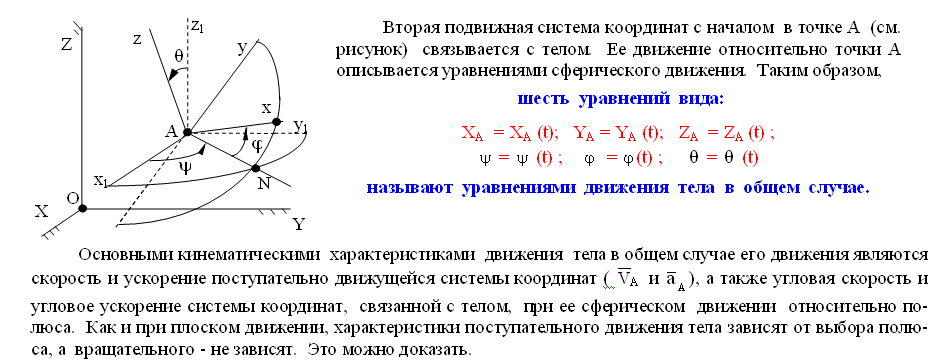
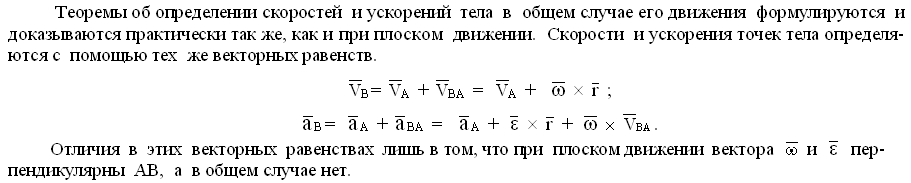
Общий случай движения тела. Скорость и ускорение произвольной точки тела в общем случае (без доказательства).
Под общим случаем понимается движение свободного твердого тела, перемещающегося в пространстве произвольным образом. То есть тело может перемещаться вдоль любой из координатных осей и поворачиваться относительно каждой из них. Тело имеет шесть степеней свободы.
Для описания общего случая движения тела принято использовать две подвижные системы координат. Одна из систем движется поступательно. Положение начала движущейся системы осей (назовем ее, как и при рассмотрении плоского движения тела, точкой А) относительно основной системы отсчета описывается тремя уравнениями. Как и в предыдущем случае, эту точку, называют полюсом.
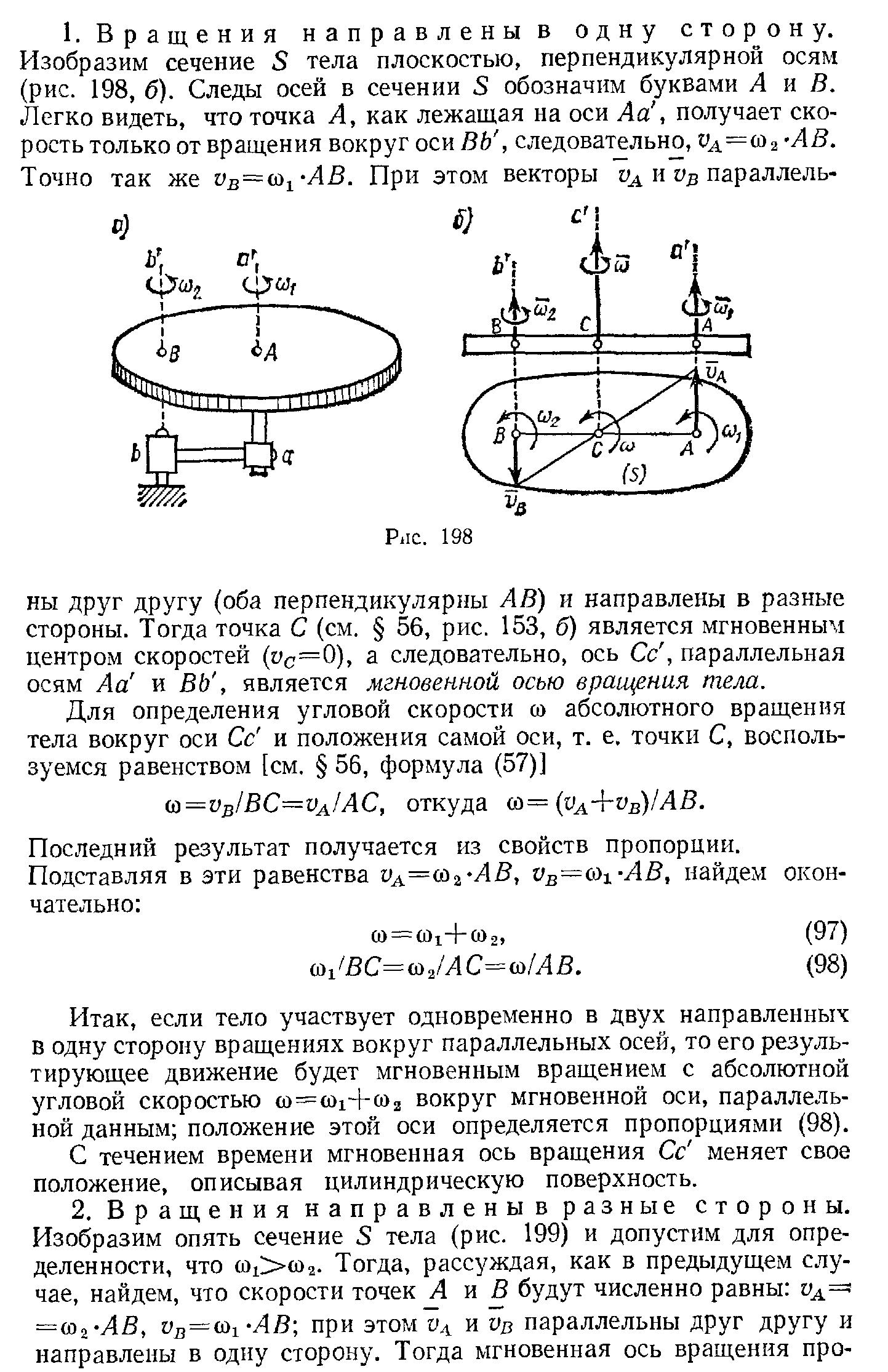
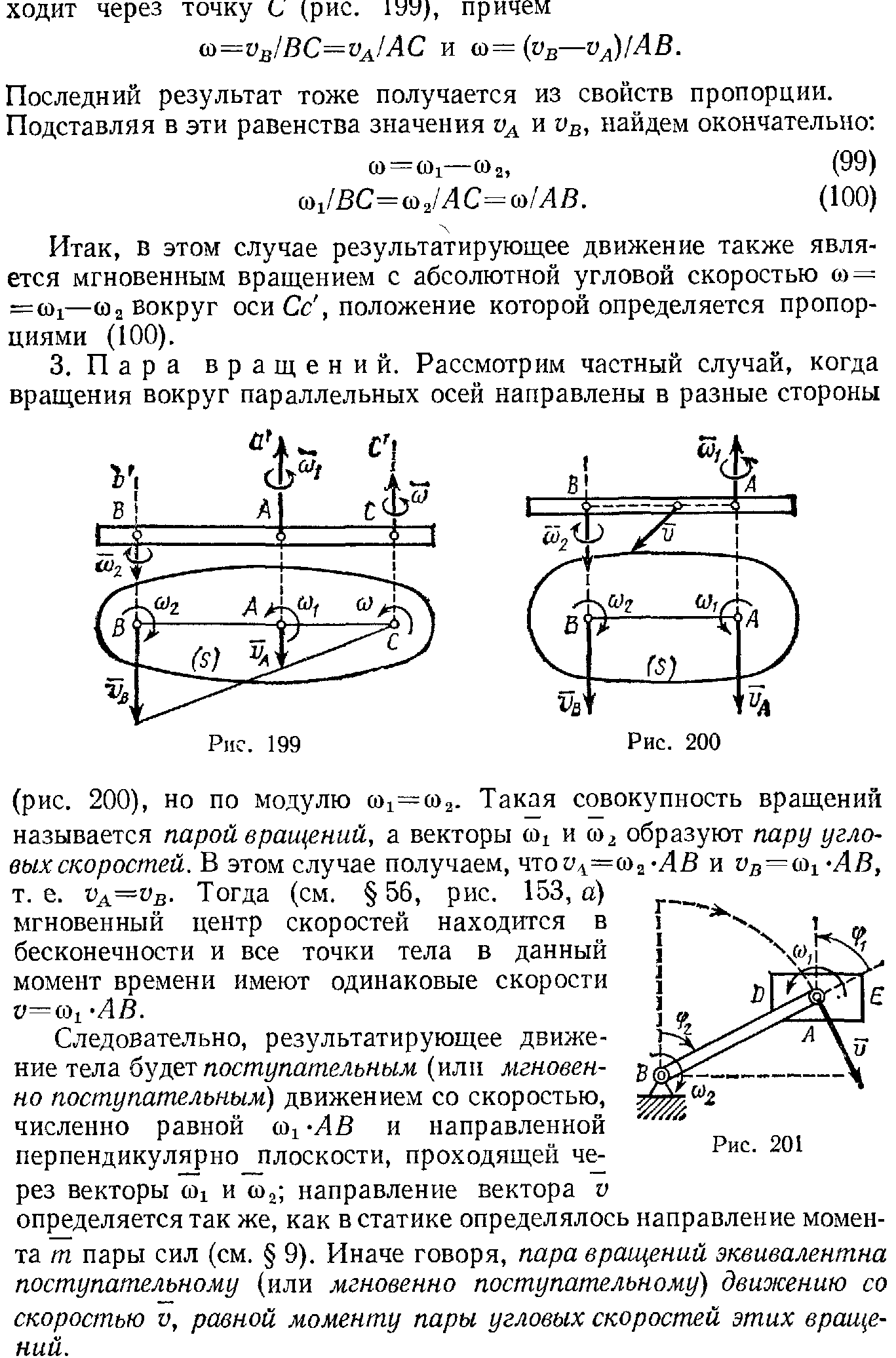
Сложное (составное) движение твердого тела. Сложение поступательных движений.
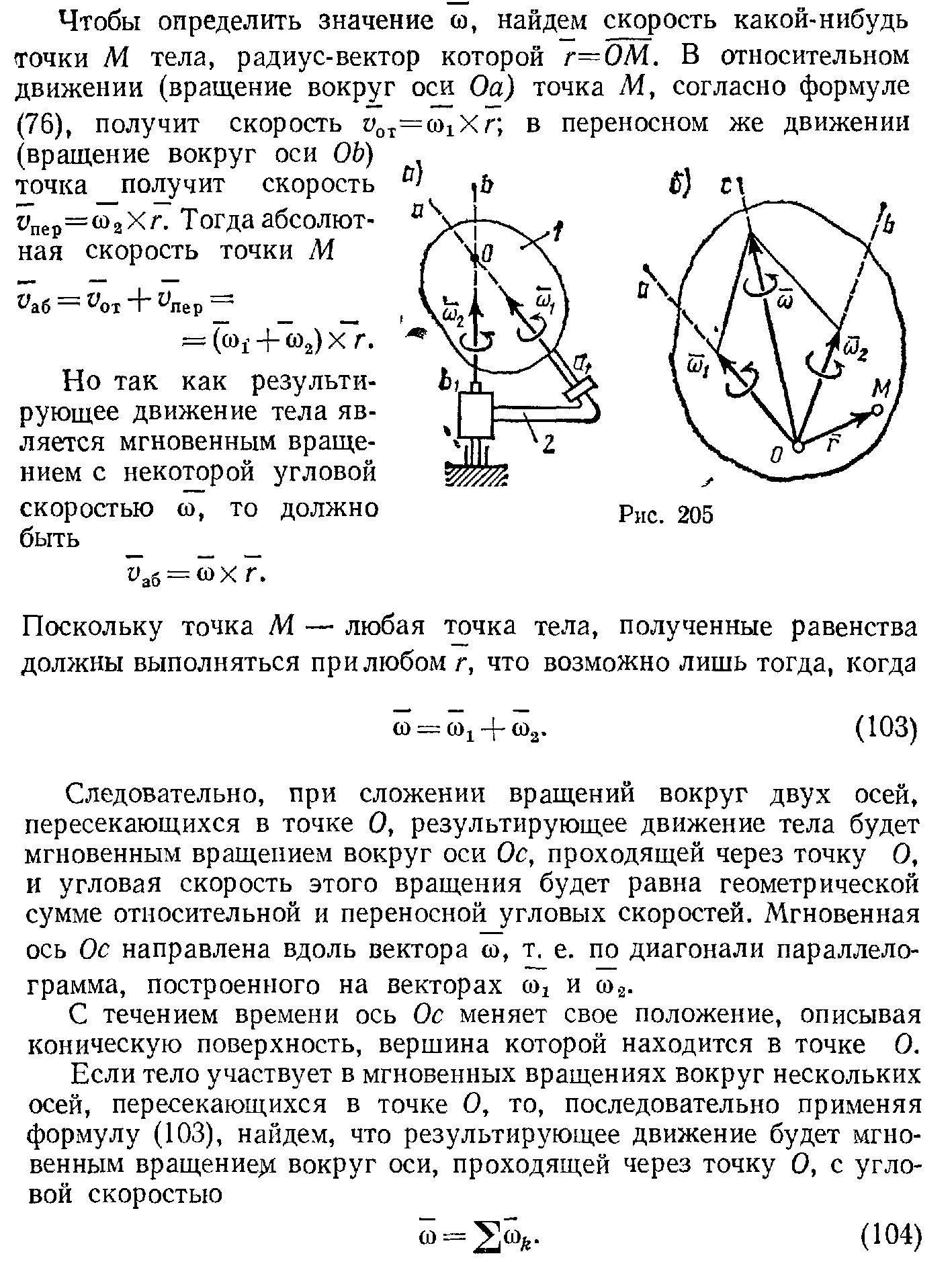
Сложение мгновенных вращений твердого тела вокруг пересекающихся и параллельных осей.