

6. Сходящаяся система сил. Равнодействующая системы сходящихся сил.
Система
сходящихся сил.
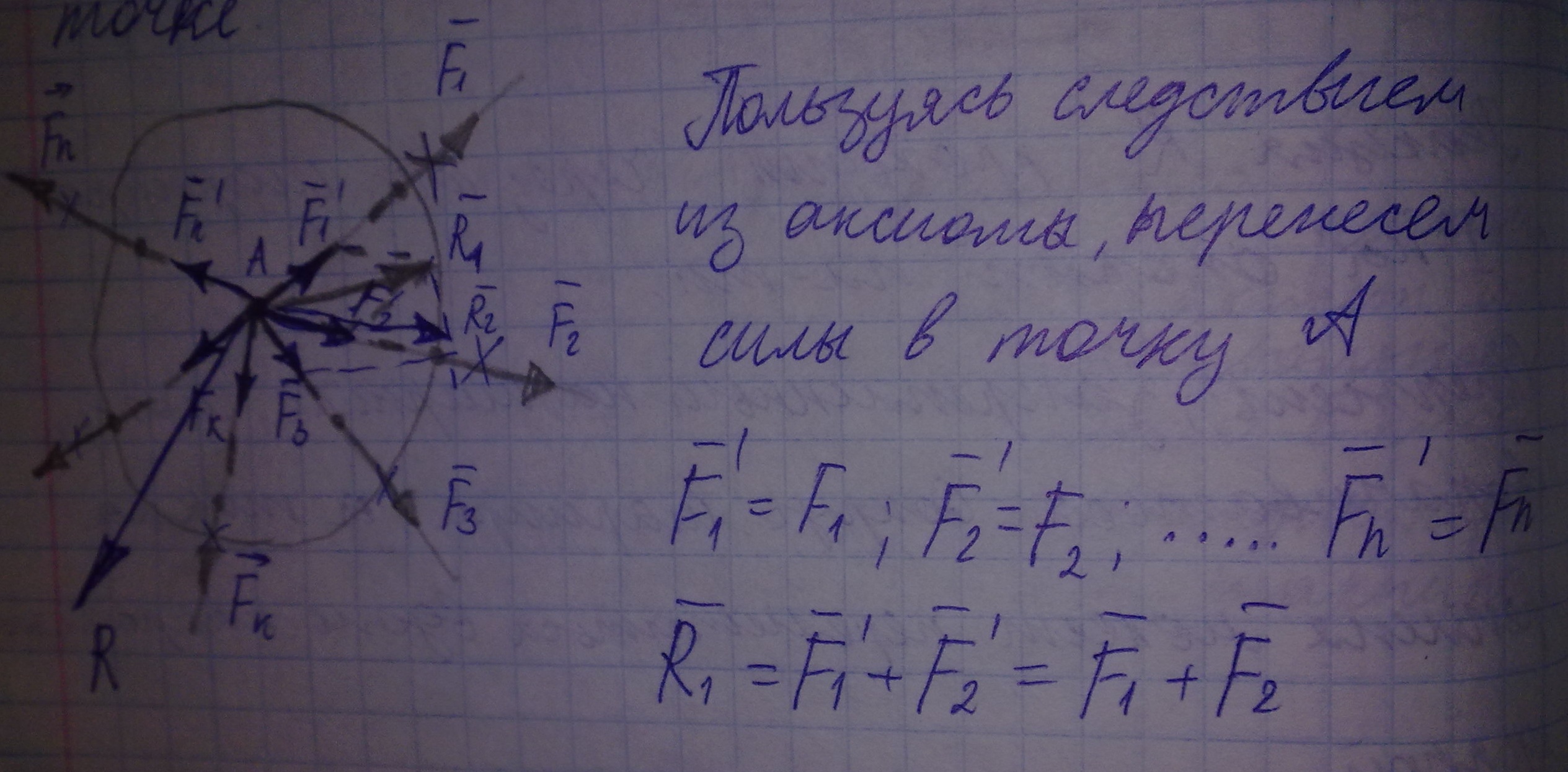
Сходящимися называются силы, линии
действия которых пересекаются в одной
точке. Равнодействующая
сходящихся сил
равна геометрической сумме этих сил и
приложена в точке их пересечения
![]() .
Равнодействующая может быть найдена
геометрич. способом – построением
силового (векторного) многоугольника
или аналитич. способом, проектируя силы
на оси координат.
.
Равнодействующая может быть найдена
геометрич. способом – построением
силового (векторного) многоугольника
или аналитич. способом, проектируя силы
на оси координат.

. Проекции силы на оси координат
(для плоской сист.):
 Fx=Fcos;
Fy=Fcos=Fsin;
проекция >0, если направление составляющей
силы совпадает с направл. оси. Модуль
силы:
Fx=Fcos;
Fy=Fcos=Fsin;
проекция >0, если направление составляющей
силы совпадает с направл. оси. Модуль
силы:![]()
![]() ;
направляющие косинусы:
;
направляющие косинусы:
![]() разложение силы на составляющие:
разложение силы на составляющие:
![]() ,
где
,
где
![]() – орт (единичный вектор) соответствующей
оси.
– орт (единичный вектор) соответствующей
оси.
Для пространственной системы:

![]() ,
,
Fx=Fcos;
Fy=Fcos;
Fz=Fcos;
![]() ;
;
![]() .
.
Проекции равнодействующей системы
сходящихся сил на координатные оси
равна алгебраическим суммам проекций
этих сил на соответствующие оси: Rx=Fix;
Ry=Fiy;
Rz=Fiz;
![]() .
.
7. Геометрические и аналитические условия равновесия системы сходящихся сил.
Для равновесия системы сходящихся сил, приложенных к твердому телу, необходимо и достаточно, чтобы равнодействующая, а следовательно, и главный вектор этих сил были равны нулю. Условия равновесия можно выразить в геометрической или в аналитической форме.
![]()
а) Геометрическое условие равновесия. Для равновесия системы сходящихся сил необходимо и достаточно, чтобы силовой многоугольник, построенный из этих сил, был замкнутым.
б) Аналитические условия равновесия.
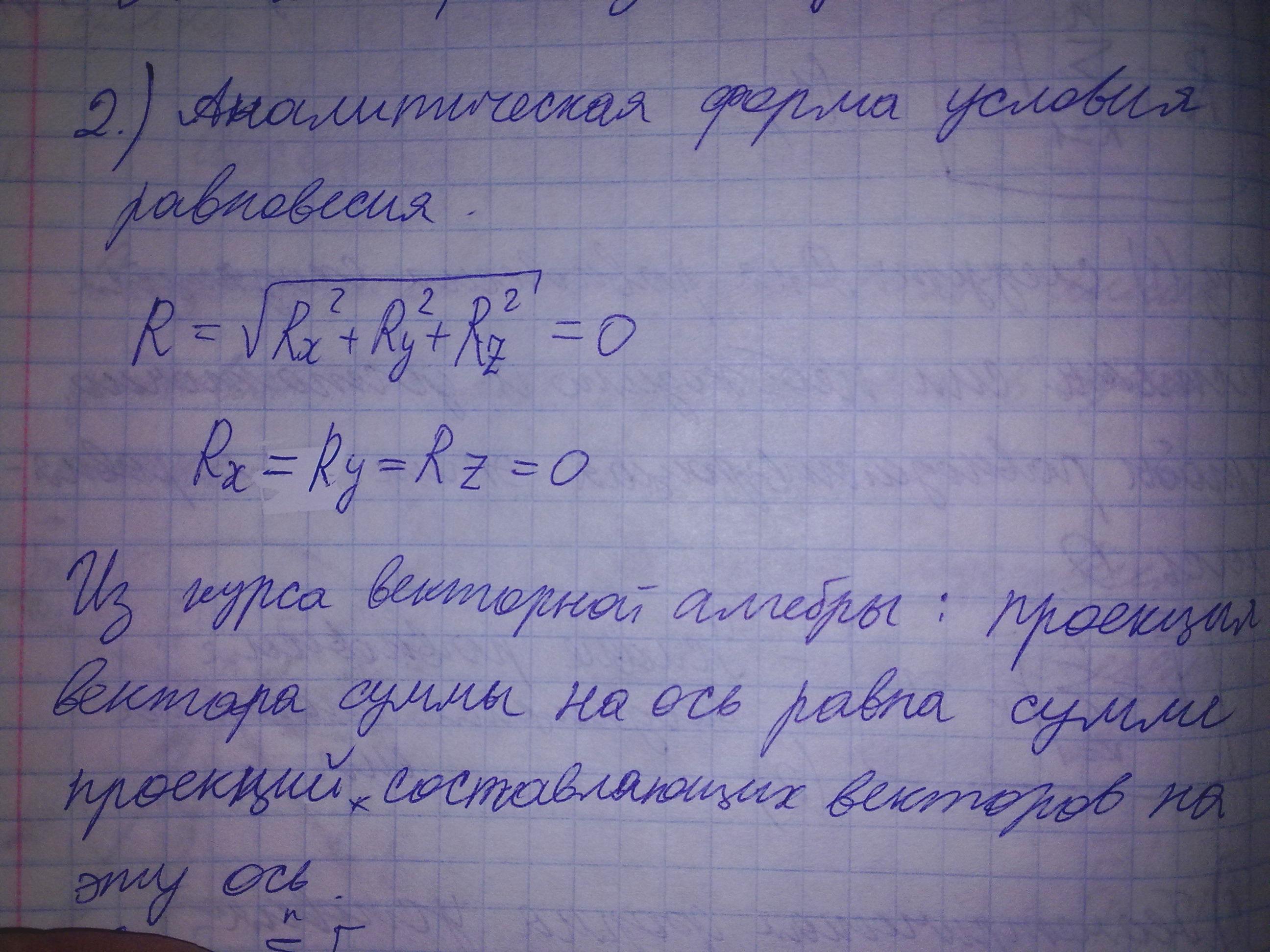
Аналитические условия равновесия системы сходящихся сил определяются формулами:
![]()
![]()
![]() -
пространственная сходящаяся
-
пространственная сходящаяся
- плоская сходящаяся система сил
Для равновесия плоской (пространственной) сходящейся системы сил необходимо и достаточно, чтобы суммы проекций всех сил на две (три) координатные оси равнялись 0.
Момент силы относительно центра как мера вращательного действия силы. Алгебраический момент силы относительно центра.
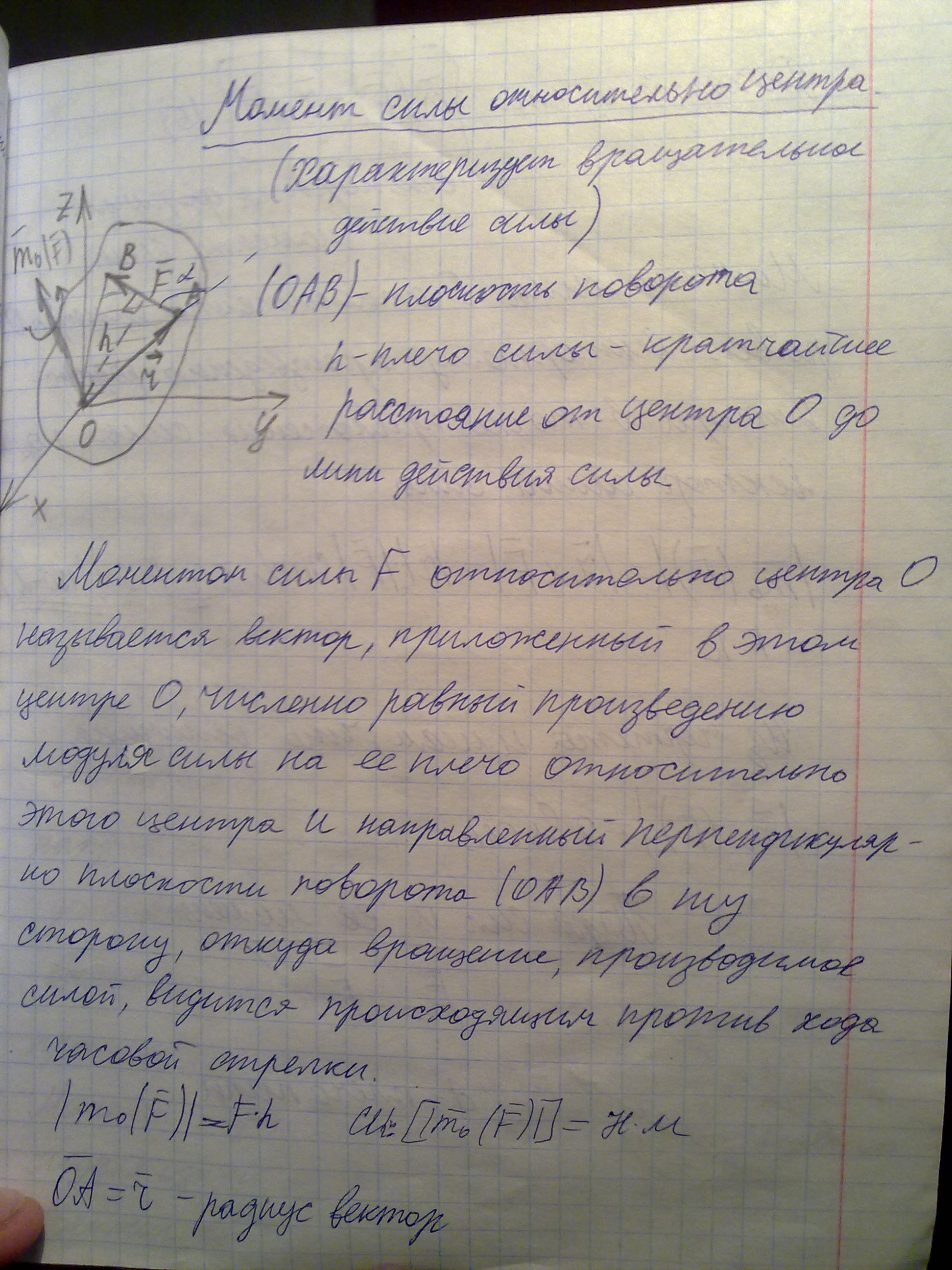
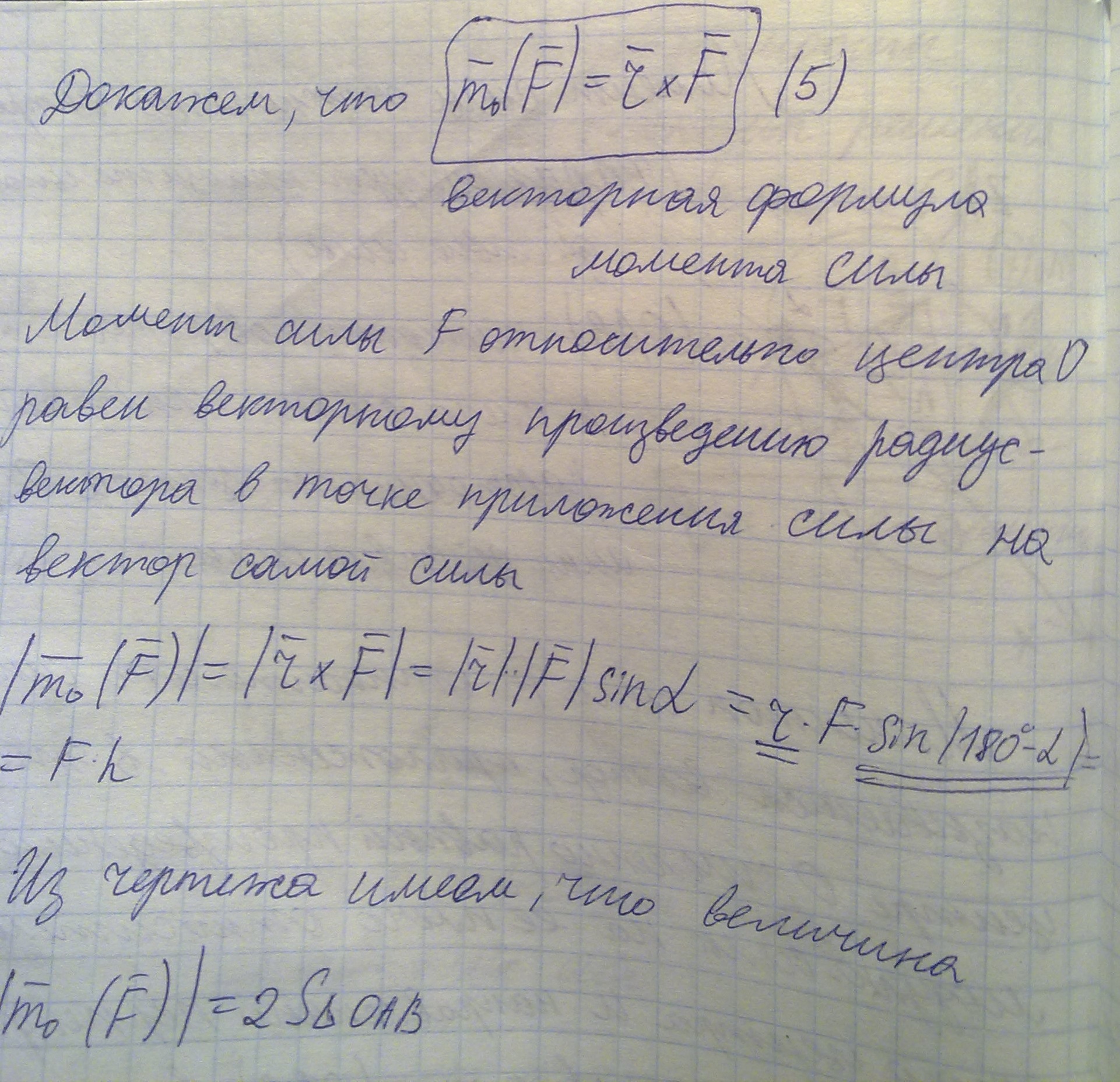
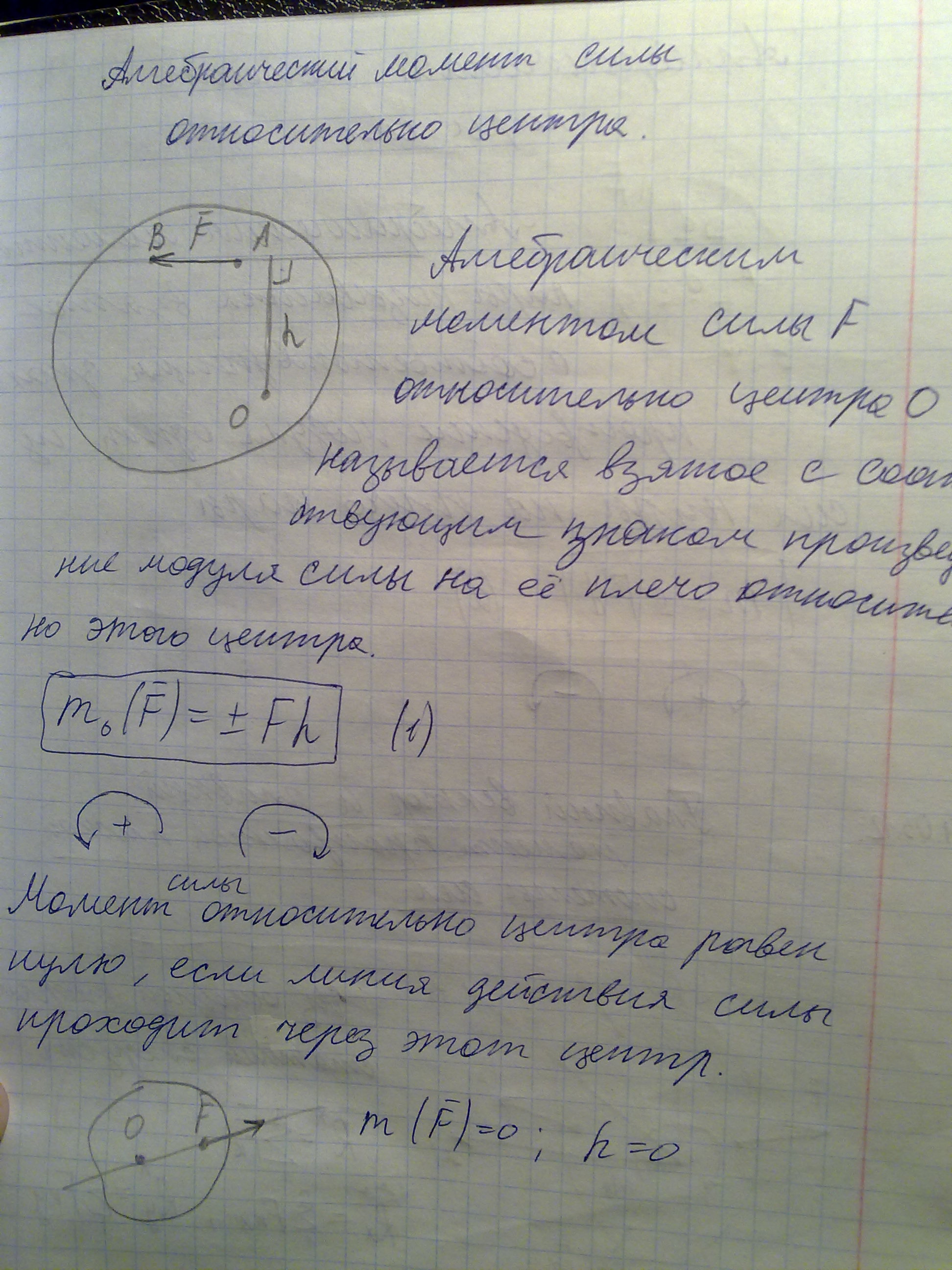
Свойства момента силы: 1) момент силы не изменяется при переносе точки приложения силы вдоль ее линии действия; 2) момент силы относит. точки =0 только тогда, когда сила =0 или когда линия действия силы проходит через точку (т.е. плечо =0). Если x,y,z – координаты точки приложения силы, Fx, Fy, Fz – проекции силы на оси координат и точка 0 – начало координат, то
![]() =(yFz
– zFy)
=(yFz
– zFy)![]() +(zFx
– xFz)
+(zFx
– xFz)![]() +(xFy
– yFx)
+(xFy
– yFx)![]()
Проекции момента на оси координат равны:
![]() ;
;
![]() ;
;
![]()
Теорема о моменте равнодействующей (теорема Вариньона).
Если система сил имеет равнодействующую, то момент равнодействующей относительно любого центра О равен сумме моментов составляющих сил относительно того же центра.
Док-во:

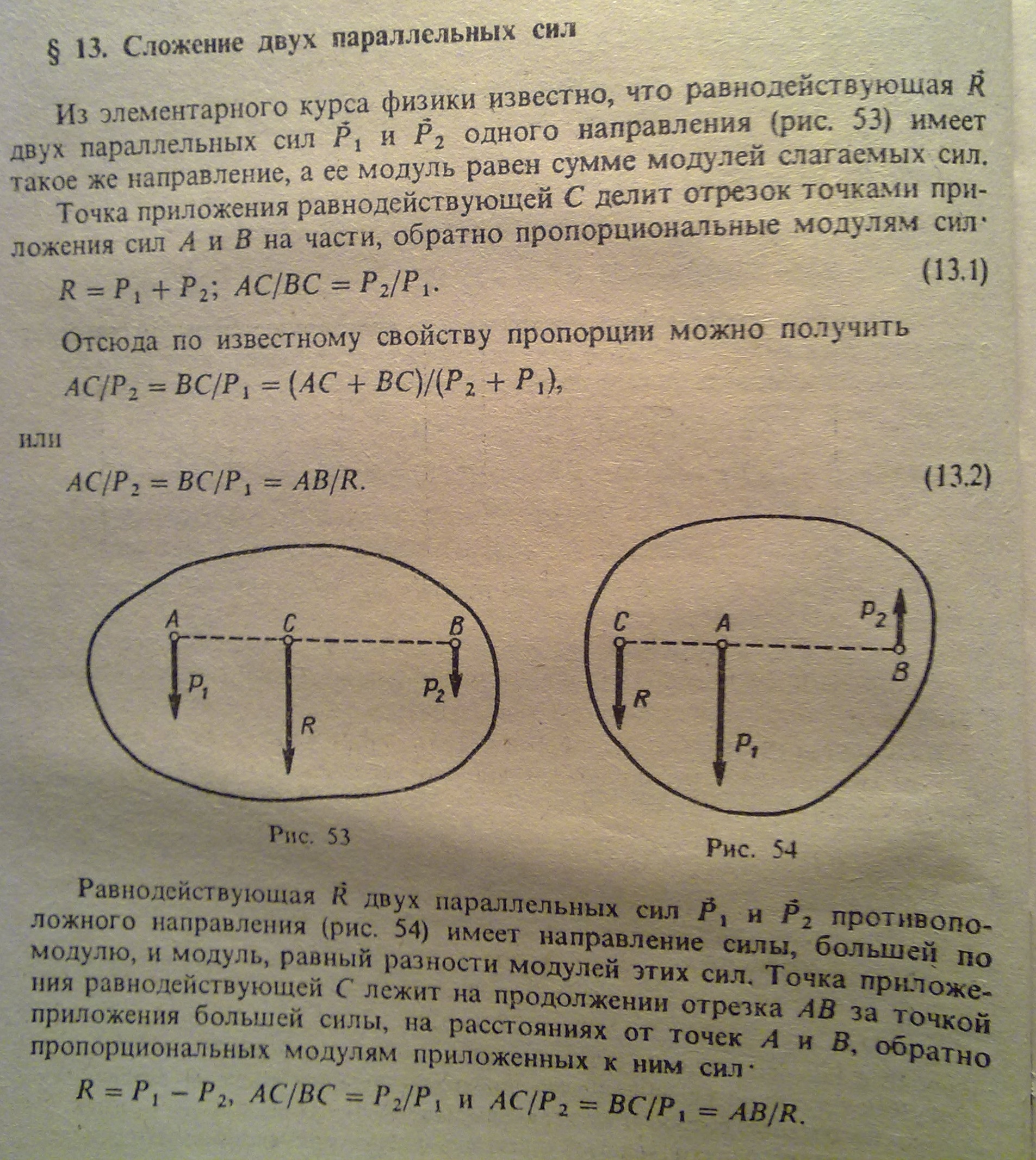
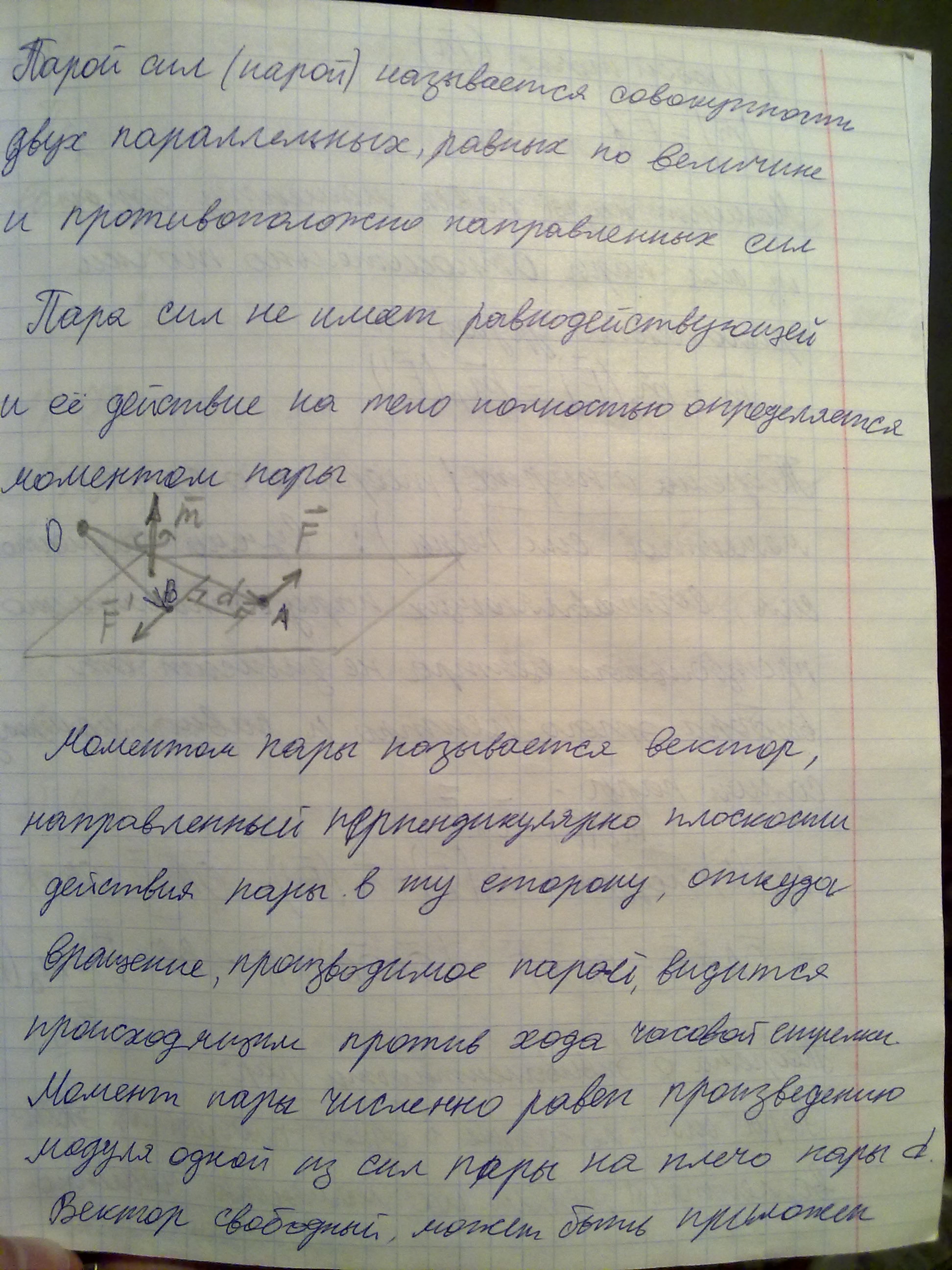
Сложение двух параллельных сил, направленных в одну и противоположные стороны (без доказательства).
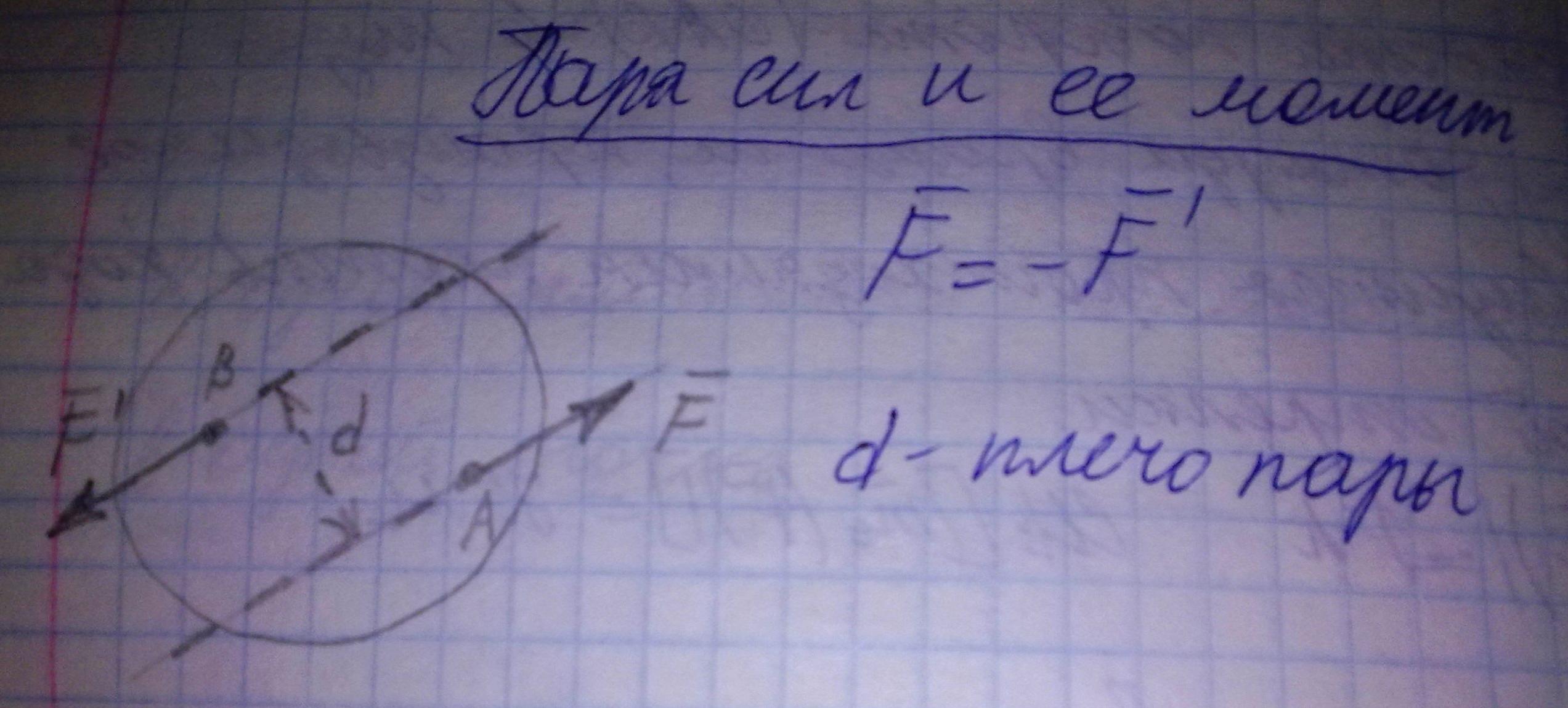
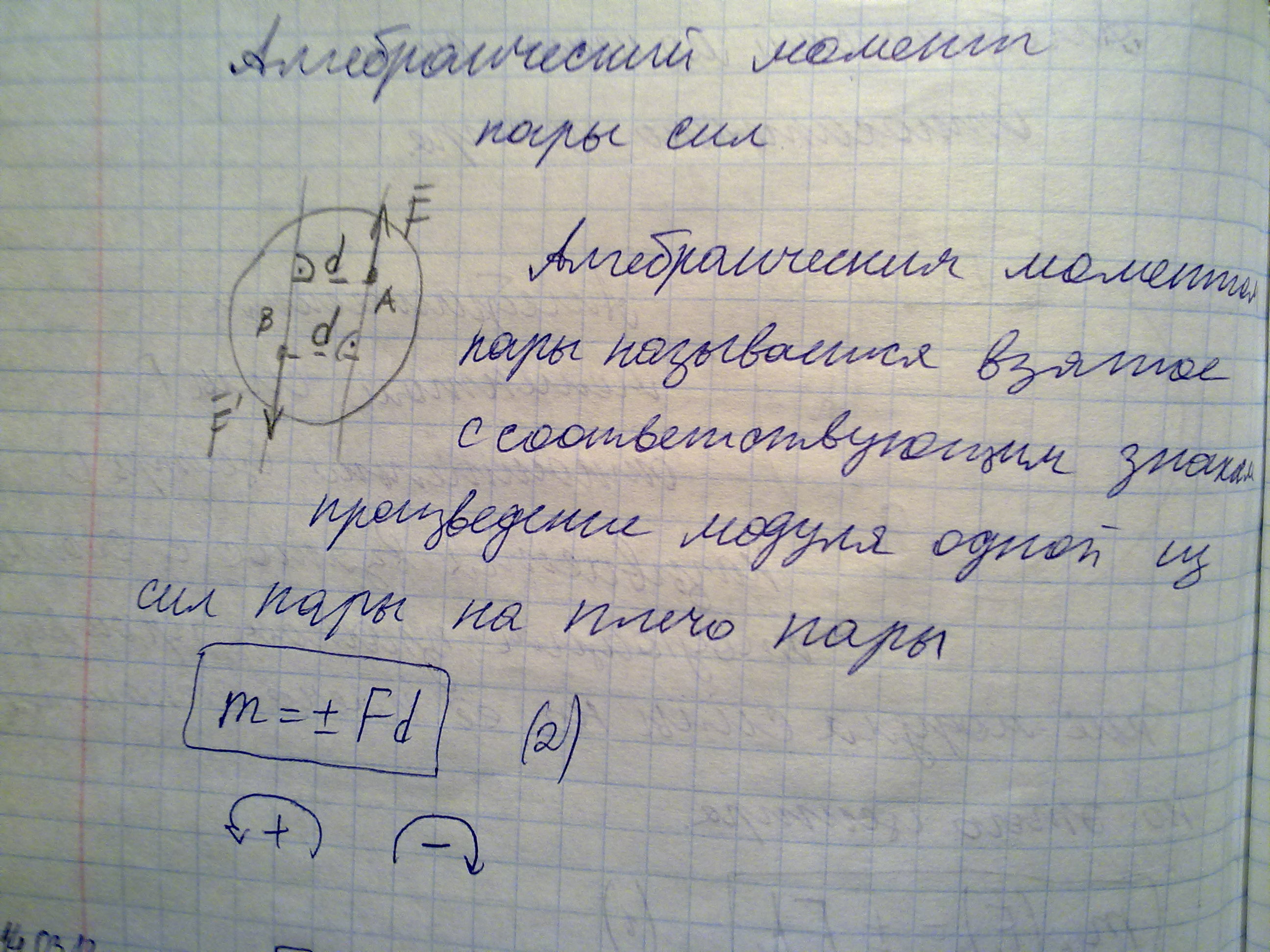
Пара сил, алгебраический момент пары сил. Момент пары сил как вектор. Теорема о независимости суммы моментов сил, составляющих пару, относительно произвольного центра.
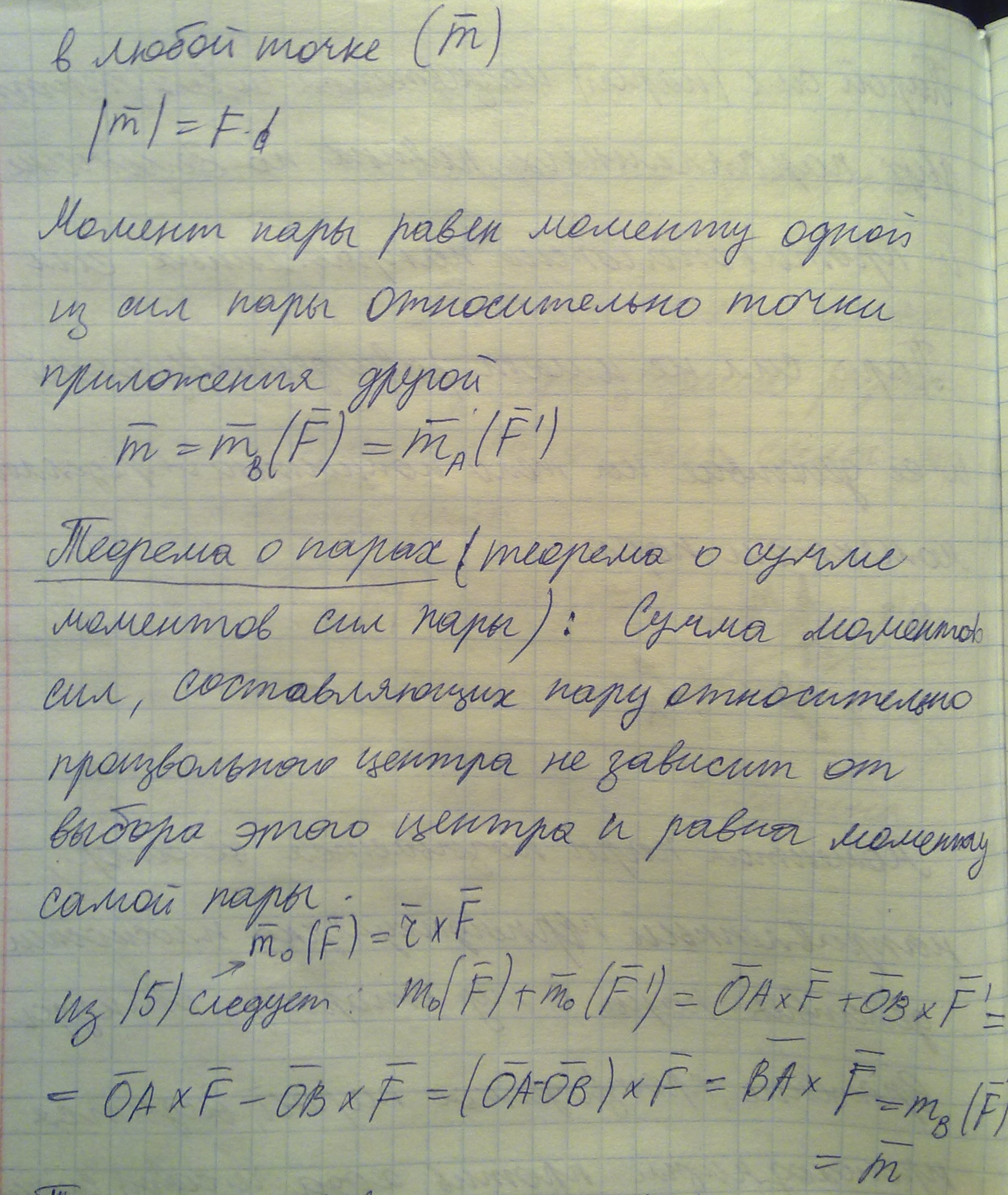
Теорема об эквивалентности пар на плоскости.
Пары сил, лежащие в одной плоскости, эквивалентны, если их моменты численно равны и одинаковы по знаку.
Теорема об эквивалентности пар сил. Пару сил, действующую на твердое тело, можно заменить другой парой сил, расположенной в той же плоскости действия и имеющий одинаковый с первой парой момент.
Доказательство: Пусть на твердое тело
действует пара сил
![]() .
.
П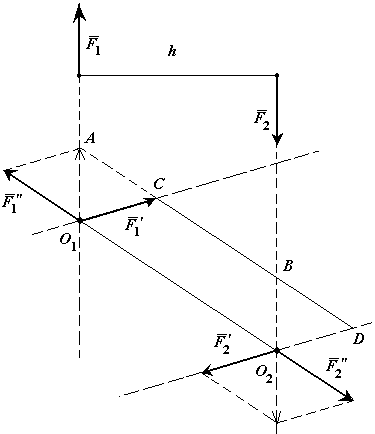 еренесем
силу
еренесем
силу
![]() в точку
в точку
![]() ,
а силу
,
а силу
![]() в точку
в точку
![]() .
Проведем через точки
.
Проведем через точки
![]() две любые параллельные прямые,
пересекающие линии действия сил пары.
Соединим точки
отрезком прямой и разложим силы
в
точке
и
в точке
по правилу параллелограмма.
две любые параллельные прямые,
пересекающие линии действия сил пары.
Соединим точки
отрезком прямой и разложим силы
в
точке
и
в точке
по правилу параллелограмма.
![]()
![]()
Так как
![]() ,
то
,
то
![]() и
и
![]()
Поэтому
эквивалентна системе
![]() ,
а эта система эквивалентна системе
,
а эта система эквивалентна системе
![]() ,
так как
,
так как
![]() эквивалентна нулю.
эквивалентна нулю.
Таким образом мы заданную пару сил заменили другой парой сил . Докажем, что моменты у этих пар сил одинаковы.
Момент исходной пары сил
численно равен площади параллелограмма
![]() ,
а момент пары сил
численно равен площади параллелограмма
,
а момент пары сил
численно равен площади параллелограмма
![]() .
Но площади этих параллелограммов
равны, так как площадь треугольника
.
Но площади этих параллелограммов
равны, так как площадь треугольника
![]() равна площади треугольника
равна площади треугольника
![]() .
.
Что и требовалось доказать.
Выводы:
Пару сил как жесткую фигуру можно как угодно поворачивать и переносить в ее плоскости действия.
У пары сил можно изменять плечо и силы, сохраняя при этом момент пары и плоскость действия.