

Геометрический и аналитический способы сложения сил.
1.1. ГЕОМЕТРИЧЕСКИЙ СПОСОБ СЛОЖЕНИЯ СИЛ.
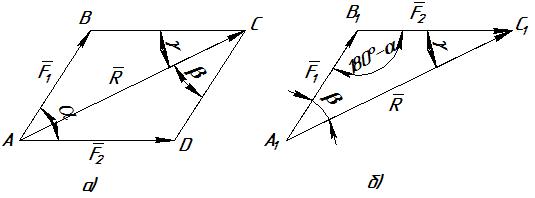
а) Сложение двух сил. Геометрическая сумма R двух сил F1 и находится по правилу параллелограмма (рис. 1, а) или построением силового треугольника (рис. 1, 6), изображающего одну из половин этого параллелограмма. Если угол между силами равен α, то модуль R и углы β, γ , которые сила R образует со слагаемыми силами, определяются по формулам:
 R
= F1
+ F2+2F1F2cosα,
R
= F1
+ F2+2F1F2cosα,
или
F1/sinγ =F2/sinβ =R/sinα. (1)
Рис. 1
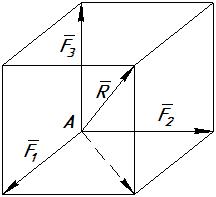
б) Сложение трех сил, не лежащих в одной плоскости.
 Геометрическая
сумма R
трех
сил F1
F2,
F3,
Геометрическая
сумма R
трех
сил F1
F2,
F3,
не лежащих в одной плоскости,
изображается диагональю параллелепипеда,
построенного на этих силах
(правило параллелепипеда).
Рис. 2
в) Сложение системы сил. Геометрическая сумма (главный вектор) любой системы сил может
б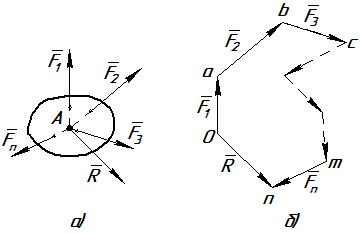 ыть
найдена силового многоугольника.
ыть
найдена силового многоугольника.
Для нахождения этим способом суммы
сил
![]() (рис.
3, а), отклады-
(рис.
3, а), отклады-
ваем от произвольной точки О (рис. 3, б)
вектор Оа, изображающий в выбранном
масштабе
силу F1,
от точки a
- вектор
![]() ,
,
изображающий силу F2, от точки b –
вектор
![]() ,
изображающий силу F3,
Рис.
3
,
изображающий силу F3,
Рис.
3
и т.
д.; от конца m
предпоследнего вектора откладываем
вектор
![]() ,
изображающий
силу Fn.
,
изображающий
силу Fn.
Соединяя начало первого вектора с концом последнего, получаем
вектор
![]() ,
изображающий
геометрическую сумму или главный вектор
слагаемых сил:
,
изображающий
геометрическую сумму или главный вектор
слагаемых сил:
![]() или
или
![]() (2)
(2)
где k = 1, 2, 3, … , n.
1.2. АНАЛИТИЧЕСКИЙ СПОСОБ ЗАДАНИЯ И СЛОЖЕНИЯ СИЛ
Aналитический метод решения задач статики основывается на понятии о проекции силы на ось. Проекция силы (как и любого другого вектора) на ось есть алгебраическая величина, равная произведению модуля силы на косинус угла между силой и положительным направлением оси. Если этот угол острый,- проекция положительна, если тупой,- отрицательна, а если сила перпендикулярна оси,- ее проекция на ось равна нулю.
Д ля аналитического задания силы необходимо выбрать систему координатных осей Oxyz, по отношению к которой будет определяться направление силы в пространстве. Зная проекции силы F на координатные оси (fх , Fy, Fz), можно определить модуль силы и углы, которые она с образует координатными Рис. 4
осями,по формулам:
(3)
![]() (4)
(4)
Аналитический способ сложения сил заключается в том, что равнодействующая системы сил (главный вектор) находится через проекции сил на координатные оси:
![]()
![]()
![]() (5)
(5)
Тогда
![]() (6)
(6)
![]() (7)
(7)