Точность систем при медленно меняющихся входных воздействиях. Коэффициенты ошибки.

Повышение точности за счет увеличения коэффициента передачи, масштабирования, применения неединичных обратных связей.

Прямые методы повышения порядка астатизма.
Основные методы повышения точности, как правило, увеличивают порядок астатизма. При этом стремятся, чтобы устойчивость исходной системы W0(s) не изменялась бы при введении дополнительных устройств Wk(s).
Порядок астатизма можно увеличить либо путем непосредственного введения интегрирующего звена в цепь системы, как это делается в прямых методах, либо косвенно, используя, например, свойства глубокой отрицательной или положительной обратных связей.
В
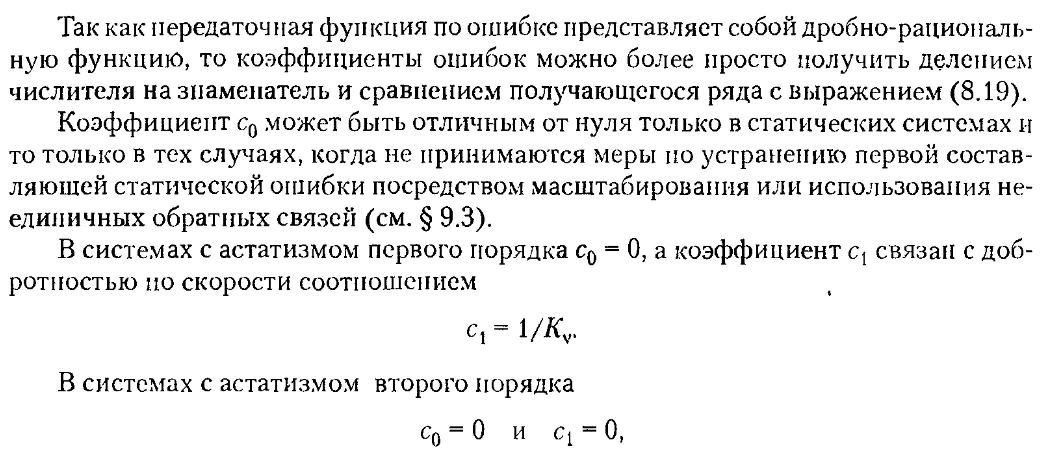
методе Боднера параллельно интегрирующему
звену включается усилительное, поэтому
передаточная функция
 имеет
вид:
имеет
вид: .
.
В
теории управления такое дополнительное
или корректирующее устройство более
известно как пропорционально-интегрирующий
регулятор или ПИ-регулятор и формула
записывается следующим образом:
 ,
где для коэффициента
,
где для коэффициента
 выполняется
выполняется .
.
 ,
где
,
где
 .
.
Устройство
Wk(s)
является изодромным звеном. Постоянная
времени выбирается из условия TИ
>
Tmax,
где Tmax
– максимальная постоянная времени
W0(s) ,
так, чтобы запас устойчивости по фазе
скорректированной системы
 был бы близок к исходной
был бы близок к исходной
 и сохранились бы требования к устойчивости
системы.
и сохранились бы требования к устойчивости
системы.
Косвенные методы повышения порядка астатизма.
Основные методы повышения точности, как правило, увеличивают порядок астатизма. При этом стремятся, чтобы устойчивость исходной системы W0(s) не изменялась бы при введении дополнительных устройств Wk(s).
Порядок астатизма можно увеличить либо путем непосредственного введения интегрирующего звена в цепь системы, как это делается в прямых методах, либо косвенно, используя, например, свойства глубокой отрицательной или положительной обратных связей.
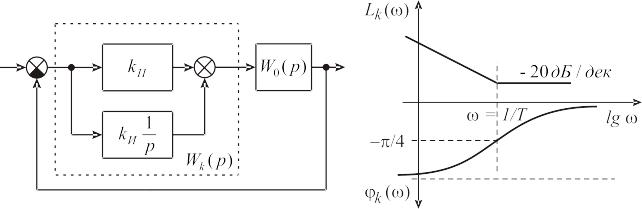
Рассмотрим косвенные способы повышения точности, основанные на свойствах обратных связей (ОС).
Звено
реального дифференцирования Wос(s)
включено в обратную связь и для
корректирующего устройства Wk(s)
с отрицательной ОС можно записать: .
.
При
 ,
т.е. при глубокой ОС будет выполняться:
,
т.е. при глубокой ОС будет выполняться:
 .
.
 -
реальное дифференцирующее звено.
-
реальное дифференцирующее звено.

Структурная
схема системы, использующей свойства
положительной ОС: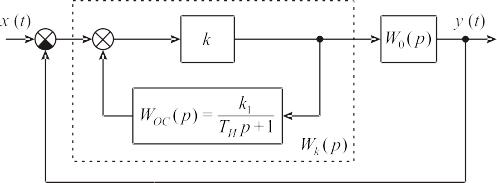
Используя
правила структурных преобразований
при положительной ОС, запишем ПФ для
Wk(s)
в виде:

Следует
отметить, что при использовании
отрицательной обратной связи ПИ-регулятор
реализуется при любых
 ,
а в случае положительной ОС требуется
точное выполнение формулы
,
а в случае положительной ОС требуется
точное выполнение формулы
 или
или
 .
.
Применение комбинированного управления. Инвариантные системы.
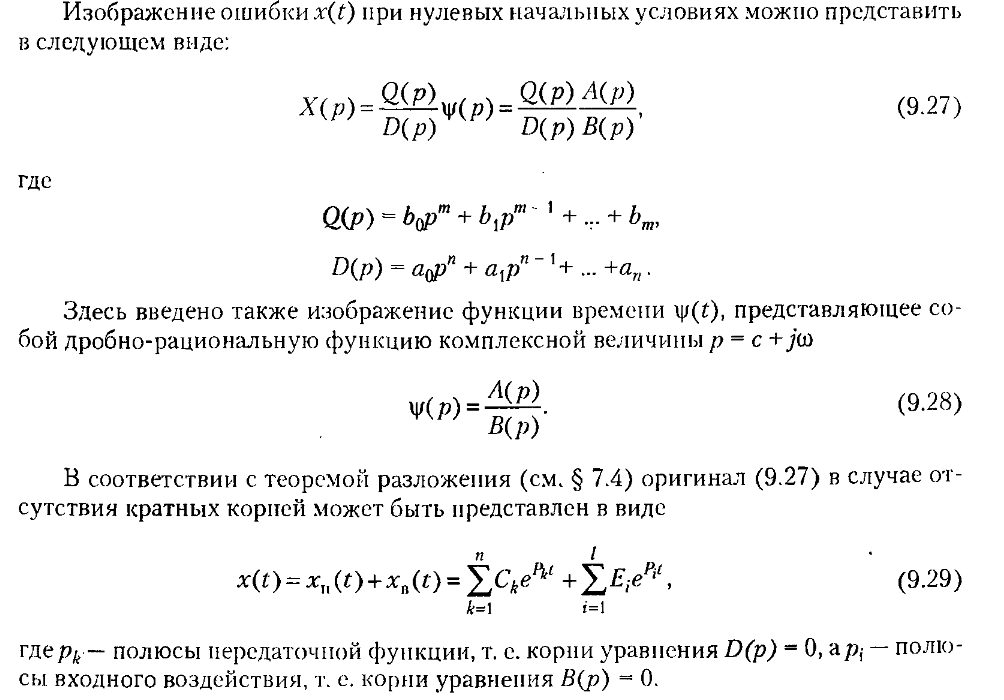
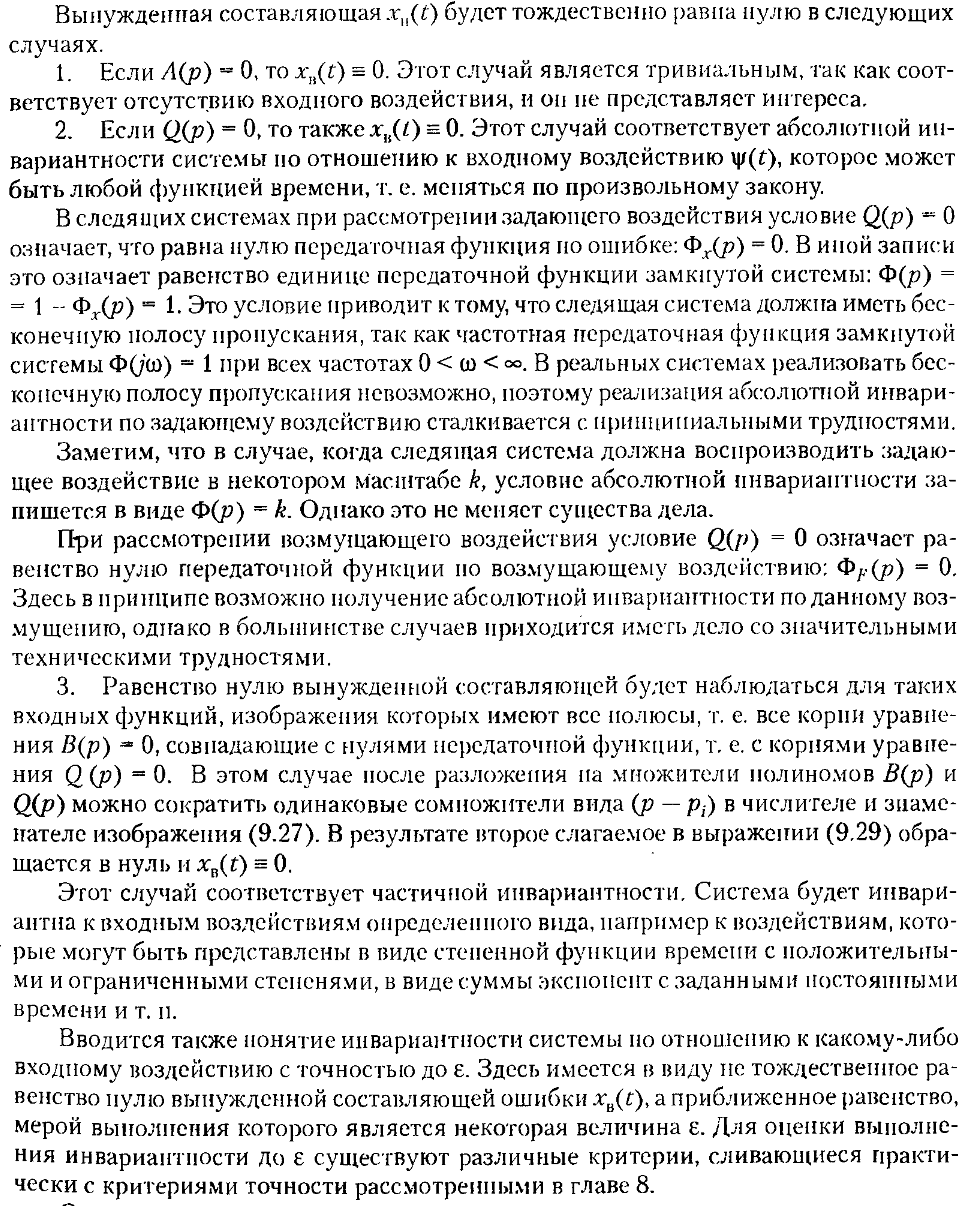
Одним из способов, позволяющих получить высокую точность в системах автоматического управления, является использование методов так называемой теории инвариантности. Система является инвариантной по отношению к возмущающему воздействию, если после завершения переходного процесса, определяемого начальными условиями, управляемая величина и ошибка системы не зависят от этого воздействия. Система является инвариантной по отношению к задающему воздействию, если после завершения переходного процесса, определяемого начальными условиями, ошибка системы не зависят от этого воздействия. Пусть для ошибки системы имеет место дифференциальное уравнение:
![]()
Решение этого уравнения имеет две составляющие – переходную xП(t) и вынужденную xB(t). Переходная составляющая определяется общим решением уравнения, а вынужденная – частным решением уравнения с правой частью.
Основным методом, используемым при построении инвариантных систем, является применение так называемого комбинированного управления.
Под комбинированным управлением понимается такой метод построения замкнутых автоматических систем, когда, наряду с управлением но отклонению или ошибке, используется управление по задающему или возмущающему воздействию. Таким образом, в системе комбинированного управления осуществляется управление по замкнутому и разомкнутому циклам.
![]()
![]()
При введении управления по задающему воздействию управляемая величина определяется выражением
![]()
Эквивалентная передаточная функция замкнутой системы с учетом управления по задающему воздействию
![]()
Из последнего выражения видно, в частности, что введение управления по задающему воздействию не меняет характеристического уравнения системы, работающей по отклонению, так как знаменатель передаточной функции замкнутой системы одинаков в (9.30) и (9.32). Это обстоятельство является замечательным свойством систем комбинированного управления.
Введение дополнительного управления по задающему воздействию не меняет левой части дифференциального уравнения. Это означает, что не будут нарушаться не только условия устойчивости, но сохранятся оценки качества переходного процесса, базирующиеся на использовании корней характеристического уравнения.
Из выражения (9.32) по известным соотношениям (5.19) и (5.26) могут быть пайлены эквивалентная (т. е. с учетом управления по задающему воздействию) передаточная функция по ошибке
![]()
и передаточная функция разомкнутой системы
![]()