

shpory_na_ekz_po_TOAT
.doc|
1.Способы управления удаленными объектами В зависимости от степени удаления объектов от пункта управления применяются три способа управления: местный, дистанционный и телемеханический. В структурной схеме местного способа управления (рис. 10.1, а)
приняты следующие сокращения: ПУ (пункт управления) – место, где расположены органы управления и находится человек – оператор; КП (контролируемый пункт) – место, где находятся управляемые объекты (УО), ЛС – линия связи, соединяющая ПУ и КП. При местном способе на ПУ находятся органы управления и источник энергии для питания объектов. На рис. 10.1, б органами управления являются ключи S1-S3, которые включают и выключают электродвигатели Д1-Д3 (управляемые объекты). Линейная батарея ЛБ для питания электродвигателей расположена на ПУ. Достоинствами местного способа являются его простота, отсутствие какой-либо дополнительной аппаратуры. Этот способ называют еще прямопроводным управлением. Его отличает высокая надежность по передаче информации и высокая помехоустойчивость. Так, повреждение одного из каналов связи (провода) не нарушает управление другими объектами. Ложное воздействие на объект (двигатель) в результате возникновения электромагнитных помех и влияний в линии связи маловероятно, поскольку требует большой мощности этой помехи. При местном способе осуществляется центральное питание объектов. Это означает, что вся энергия, необходимая для включения УО, передается по линии связи (провода) из центра управления. Поэтому местный способ имеет два существенных недостатка – невысокую дальность управления из-за потерь энергии в линии связи и многоканальность (многопроводность). Для того, чтобы включить N объектов, требуется N + 1 провод (один провод обратный). Поэтому местный способ применяют на небольших расстояниях (десятки, сотни метров) при небольшом числе объектов (десятки объектов). В железнодорожной автоматике местный способ управления применяют в системах электрический централизации (ЭЦ) с центральным питанием. Органы управления (сигнальные кнопки, стрелочные рукоятки) расположены на специальном пульте-табло на посту ЭЦ. Управляемые объекты (стрелки и светофоры) находятся в горловине станции и связаны с постом ЭЦ кабелем. Чтобы увеличить дальность управления, применяют дистанционный способ (рис. 10.2).
В этом случае на КП в линию связи включаются промежуточные линейные реле Л1-Л3, через контакты которых осуществляется управление двигателями. Центральный источник энергии (ЛБ) используется для питания промежуточных реле, а управляемые объекты (двигатели) имеют местное питание от местного источника энергии (МБ). Такой способ позволяет увеличить дальность управления, поскольку по линейным проводам передается ток для включения реле (единицы миллиампер), который примерно в тысячу раз меньше тока, потребляемого двигателем (единицы ампер). Дистанционный способ принципиально отличается от местного тем, что в нем по линии связи передается информация о том, какой объект надо включить, а не энергия включения этого объекта. Однако эта информация не является кодированной и поэтому многоканальность, как недостаток, сохраняется. Дистанционный способ применяют на средних расстояниях (сотни метров, километры) при небольшом числе объектов (десятки объектов). Данный способ использован в системах электрической централизации с местным питанием (рис. 10.3).
В этом случае в горловине станции располагается релейный шкаф, в котором размещаются промежуточные реле и другая аппаратура. Чтобы исключить многоканальность как недостаток системы управления необходимо закодировать передаваемую информацию (телемеханический способ управления) (рис. 10.4).
10.4. Структурная схема телемеханического способа управления Он применяется при больших расстояниях и большом числе ОУ. Основная цель телемеханического способа – сделать число каналов связи существенно меньше числа ОУ. В большинстве случаев используется всего один канал связи. Дальность управления определяется только чувствительностью и мощностью приемно-передающих устройств и в принципе неограниченна. Например, с помощью этого способа осуществляется передача информации при космических полетах. На пункте управления оператор или некоторая автоматическая система воздействует на органы управления ОУ телемеханической системы и формируется первичный сигнал ПС. Это может быть сигнал от кнопок, рукояток, датчиков и т.п. Первичный сигнал кодируется кодирующим устройством КУ. Закодировать сигнал это значит сделать его отличным от других. Передающее устройство ПерУ преобразует кодированный сигнал КС в линейный сигнал ЛС, удобный для передачи по линии связи. Передающее устройство также согласует кодирующую аппаратуру с линией связи и усиливает сигнал. На контролируемом пункте линейный сигнал воспринимается приемным устройством ПрУ, усиливается и преобразуется в сигнал управления СУ. Затем осуществляется его декодирование декодирующим устройством ДУ. Декодировать сигнал это значит определить, какое передается сообщение и какому объекту. Декодированный сигнал ДС поступает на выходные преобразователи ВП, которые воздействуют на управляемые объекты.
4. Показатели телемеханических систем. Таблица 1
Для характеристики свойств телемеханических систем используется несколько показателей. Под информационной емкостью понимается число объектов измерения, сигнализации, управления и регулирования, от (для) которых может передавать информацию устройство телемеханики. Быстродействие системы оценивается как интервал времени с момента появления события на передающем пункте телемеханической системы до представления информации о нем на приемном пункте. Важнейшим показателем является достоверность передачи информации. С этой точки зрения телемеханические комплексы делятся на три категории (таблица).
|
2.Виды телемеханических систем Телемеханические системы делятся на дискретные и непрерывные. дискретные системы применяют, если управляемые объекты являются дискретными, т.е. имеют конечное множество состояний. Наиболее распространены двухпозиционные объекты, имеющие два состояния: включено и выключено. К ним относится большинство объектов железнодорожной автоматики (стрелочные электроприводы, светофоры, рельсовые цепи и др.). Непрерывные объекты применяют, если состояние объектов управления изменяется непрерывно (напряжение генератора, температура в электропечи, уровень воды в шлюзе и др.). Еще один вид классификации телемеханических систем связан с понятием телемеханической сети, как совокупности устройств телемеханики и объединяющих их каналов связи. Структура сети (см. рис. 10.4)
10.4. Структурная схема телемеханического способа управления является простейшей. Такую систему называют «соединение пункт-пункт» (рис. 10.5, а).
Более сложной является многоточечная структура телемеханической сети, которая имеет два или более контролируемых пункта. Наиболее распространенные структуры данного типа приведены на рис. 10.5, в, г, д. В радиальной структуре (рис. 10.5, б) ПУ соединяется с каждым КП отдельным каналом связи. Это обеспечивает независимость работы КП друг от друга при повреждениях каналов связи. Такая структура используется на крупных станциях для телемеханического управления объектами в удаленных горловинах с помощью специальной системы станционной кодовой централизации (рис. 10.6, РПУ – район прямого управления; РКУ – район кодового управления). В цепочной структуре (рис. 10.5, в) все КП соединяются с ПУ общим каналом связи. Это обеспечивает наиболее эффективное использование канала связи, но возникают проблемы при его повреждениях и проблемы регламентации работы различных КП. Цепочечная структура применяется в диспетчерских централизациях (см. рис. 1.3). Комбинация из радиальной и цепочечной структур (рис. 10.5, г) применяется при организации крупных диспетчерских центров (например, в масштабах железной дороги). Повышение надежности соединений в телемеханической сети дает кольцевая структура (рис. 10.5, д), в которой канал связи образует кольцо, и ПУ может быть связан с каждым КП двумя различными способами.
5. Телемеханические сигналы. В телемеханических системах на расстояние передается информация (команды ТУ и ТС). Материальными носителями информации являются некоторые физические процессы в канале связи – сигналы. В качестве сигналов выступают импульсы тока в линиях связи или радиосигналы. Импульсы тока несут информацию вследствие того, что обладают различными качествами.Наиболее широко используются амплитудные, временные, частотные, фазовые, полярные импульсные качества. Импульсы постоянного (рис. 10.7, а)
10.7. Амплитудные качества импульсов и схема линейной цепи линии связи
или переменного
(рис. 10.7, б) тока различаются по амплитуде.
На рис. 10.7, в приведен один из возможных
вариантов построения линии связи
(линейная цепь) для передачи импульсов
с амплитудными качествами. Последние
формируются на ПУ в результате измерения
сопротивления R
резистора, включенного в ЛС, или
изменения напряжения источника питания
GB.
Прием импульсов на КП осуществляется
амплитудными анализаторами – линейные
реле Л1-Л3 с различной чувствительностью.
В данной системе передаются импульсы
с тремя качествами i1,
i2,
i3.
Линейные реле выбирают так, что
Недостатком амплитудного качества является слабая помехозащищенность, поскольку одна амплитуда легко может трансформироваться в другую при изменении сопротивления линии связи (из-за погодных условий), при возникновении электромагнитных влияний или помех. В системах диспетчерской централизации амплитудное качество не использовалось. Импульсы постоянного (рис. 10.8, а)
или переменного
(рис. 10.8, б) тока различаются длительностью.
Их формируют специальные времязадающие
схемы (ВЗС), а принимают временные
анализаторы. В схеме (рис. 10.8, в) ВЗС
включает и выключает реле-передатчик
П, фронтовой контакт которого замыкает
и размыкает линейную цепь, передавая
импульсы с двумя качествами t1
и t2
– длинные и короткие импульсы. Как
временные анализаторы используются
реле Л1 и Л2 с различным временем
притяжения, причем
Недостатком временно́го качества также является слабая помехозащищенность. Длительность может исказиться из-за временных параметров аппаратуры и линии связи. Достоинство временно́го качества по сравнению с амплитудным состоит в том, что для передачи информации можно использовать и интервалы (длинные и короткие), что сокращает время передачи команд примерно в 2 раза. Временные качества использовались в первой отечественной системе диспетчерской централизации временно́го кода ДВК (рис. 10.8, г). Длительность длинных импульсов и интервалов в команде ТУ составляет 0,35 с, а длительность коротких – 0,1 с. Импульсы переменного тока (рис. 10.9, а) различаются своей частотой, а импульсы постоянного тока (рис. 10.9, б) – частотой следования. Частотные качества формируют частотные генераторы. У генераторов переменного тока частота легко изменяется воздействием на параметры L и C колебательного контура (рис. 10.9, в). Частоты выделяются фильтрами (рис. 10.9, г). Достоинствами частотных качеств являются хорошая помехозащищенность (трансформация одной частоты в другую маловероятна), простота аппаратуры (легко настроить генератор или фильтра на заданную частоту) и , поэтому возможность передачи импульсов с неограниченным количеством качеств, возможность передачи по линии связи импульсов с несколькими качествами одновременно (частотное уплотнение). Частотные качества применяют в системах диспетчерской централизации ПЧДЦ, ЧДЦ, Нева, Луч. На рис. 10.9, д показано построение команды ТУ в системе ЧДЦ. Команда содержит 18 импульсов. Они передаются частотами 500, 600, 700 и 800 Гц.
Импульсы переменного тока различаются по фазе. На рис. 10.10, а и б
10.10. Фазовые качества импульсов показаны соответственно два случая, когда импульсы тока передаются со сдвигом по фазе на 180º и на 120º. Последний случай использован в системе диспетчерской централизации «Луч». Фазовые качества формируются с помощью фазосдвигающих схем, а принимаются – фазочувствительными схемами. Достоинством фазовых качеств является хорошая помехозащищенность. На рис. 10.10, в показана команда ТУ в системе «Луч». |
3. Организация обмена информацией между ПУ и КП (протокол обмена) В телемеханической системе есть один ПУ и множество КП. По этой причине возникает проблема организации обмена информацией между ними (протокол обмена). В системах железнодорожной телемеханики используют, в основном, четыре принципа обмена информацией и их сочетания. Спорадический принцип предполагает передачу только новой информации в момент ее возникновения (нажатие кнопки оператором, изменение состояния контролируемого объекта и т.п.). При циклическом принципе осуществляется последовательное поочередное подключение к каналу связи всех КП и выделение временно́го интервала для обмена информацией. При использовании принципа «по запросу» вся текущая информация накапливается на КП и передается только тогда, когда на данный КП поступает команда запроса из ПУ. Принцип приоритета устанавливает неравноправие между различными командами ТУ и ТС, а также между различными КП.
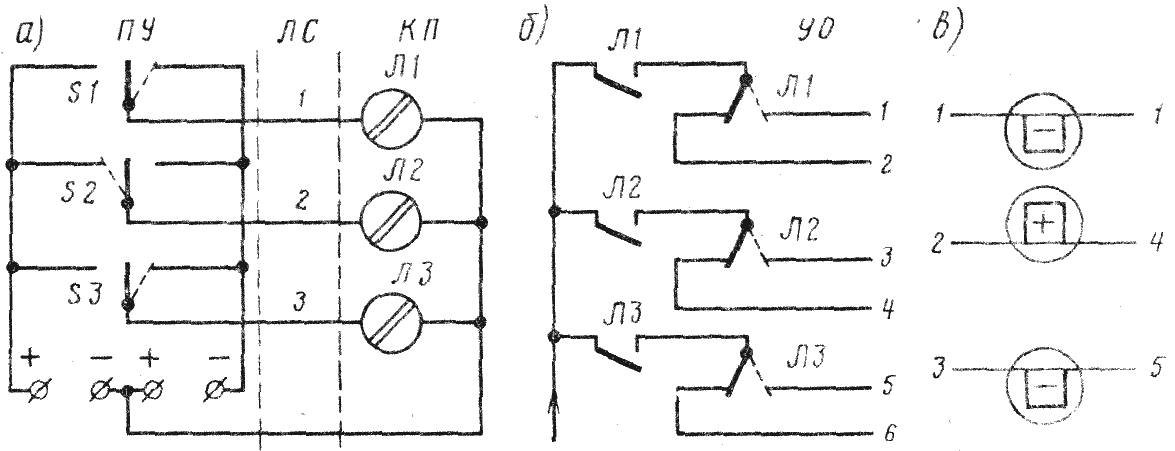
6. Виды селекции объектов. При телемеханическом управлении и контроле основной является задача выбора объекта управления. Селекция – это метод выбора объекта из множества объектов, подлежащих управлению. Виды селекции различаются видом сигнала и видом разделения сигналов. Сигналы подразделяют на одноэлементные и многоэлементные. В одноэлементном сигнале сообщение несет один импульс тока, в многоэлементном сигнале – все импульсы тока. Для того, чтобы определить сообщение, которое несет, например трехэлементный сигнал (осуществить декодирование), необходимо знать качество каждого из трех импульсов. Выделяют также линейное и временно́е разделение сигналов. При линейном разделении (рис. 10.12, а)
импульсы тока передаются одновременно каждый по своему каналу (физический провод, частотный канал и др.). При временно́м разделении (рис. 10.12, б) импульсы тока передаются последовательно во времени каждый по своему временно́му каналу. Сочетания указанных двух признаков дают четыре вида селекции. Разделительная селекция – линейное разделение одноэлементных сигналов. В схеме (рис. 10.13, а)
10.13. Схемы разделительной селекции для передачи сообщений используются полярные качества импульсов постоянного тока, которые формируются ключами S1-S3 и воспринимаются комбинированными реле Л1-Л2. при приеме импульса положительной полярности контакт реле Л занимает левое положение (рис. 10.13, б). Рассмотрим работу схемы при положении ключей, показанном на рис. 10.13 штриховой линией. При этом по первому и третьему проводам передается импульс отрицательной полярности, а по второму проводу – положительной полярности (рис. 10.13, в). Включаются объекты 1, 4 и 5. Таким образом, командное значение имеет каждый импульс тока, который передается по отдельному проводу.
Виды селекции
характеризуются информационной
емкостью N
и времем передачи сообщения
(быстродействием) T.
Свойства селекции тем лучше, чем больше
N
и меньше T.
Для разделительной селекции
Достоинствами разделительной селекции являются минимальное время передачи сообщения и возможность независимой и одновременной передачи приказов различным объектам, а недостатками – небольшая емкость и многопроводность (многоканальность). Чтобы увеличить емкость системы применяется многоэлементный сигнал.
|
|||||||||||||||||||||||
|
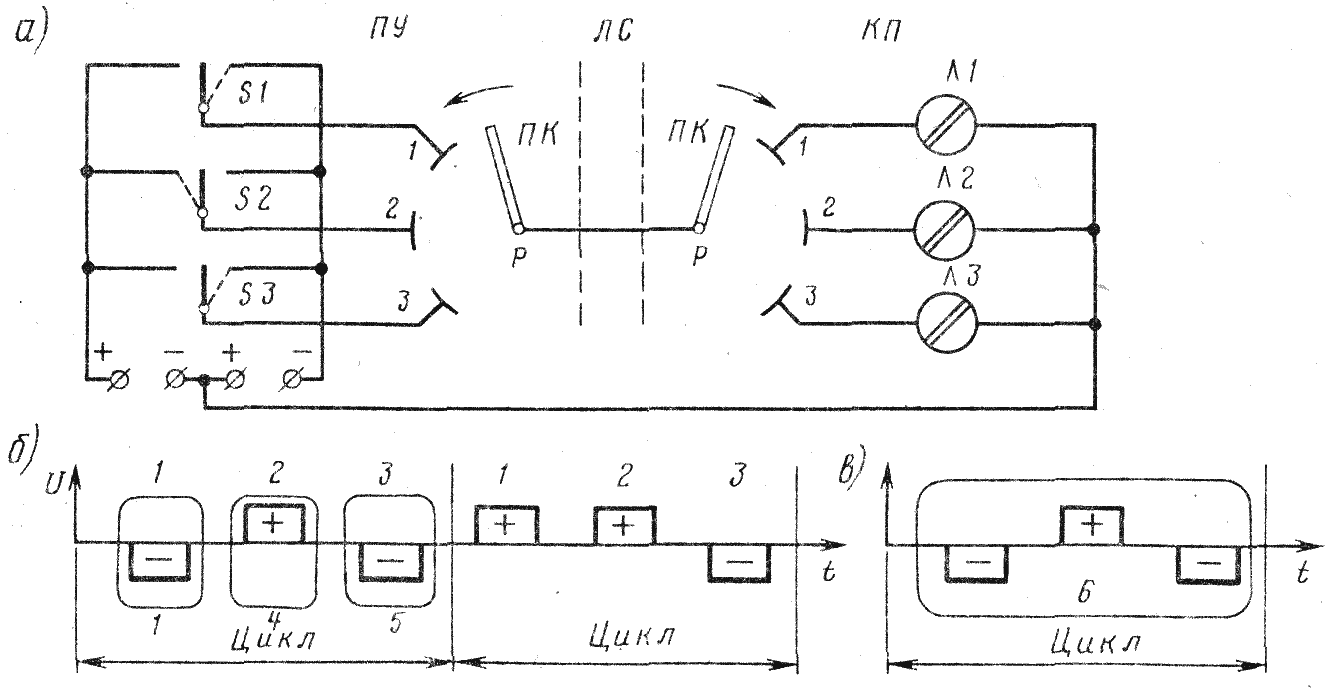
7. Кодовая и кодово-распределительная селекция Кодовая селекция – временно́е разделение многоэлементных сигналов. При кодовой селекции схема включения линейных реле совпадает со схемой распределительной селекции (см. рис. 10.15, а)
,а схема включения УО – со схемой качественно-комбинационной селекции (см. рис. 10.14, а).
За время одного цикла работы распределителей в кодовой селекции передается приказ на включение только одного объекта (рис. 10.15, в). Таким образом, командное значение определяется качеством всех трех импульсов, каждый из которых передается по отдельному временно́му каналу.
Для кодовой
селекции
Иногда в системах телемеханики одновременно используют кодовую и распределительную селекции. Кодово-распределительная селекция применяется, если управляемые объекты расположены отдельными группами на большом расстоянии друг от друга. Так расположены объекты (стрелки и светофоры) промежуточных станций на железнодорожном участке (рис. 10.16).
Поэтому кодово-распределительная селекция используется в системах диспетчерской централизации. Задача выбора управляемого объекта в этом случае делится на две: выбор группы (станция) и объекта в данной группе. Достоинством кодово-распределительной селекции является возможность с помощью одной команды ТУ передать приказы нескольким объектам в одной группе. Это необходимо, например, при установке маршрута на станции. Управляющий приказ (см. рис. 10.11, в)
несет в себе три команды: перевод стрелок 1 и 3 в плюсовое положение и открытие сигнала Н на станции А (см. рис. 10.16). |
8. Классификация и характеристики кодов. В зависимости от длины различают одноэлементные и многоэлементные коды. В одноэлементных кодах n = 1, и сообщение несет один импульс тока. Эти коды используют в системах телемеханики с разделительной и распределительной селекциями. В многоэлементных кодах n > 1 и сообщение несут n импульсов тока. Их используют при качественно-комбинационной и кодовой селекциях. В зависимости от основания различают двоичные и многопозиционные коды. Двоичные (бинарные, двухпозиционные) коды имеют два качества импульсов тока (k = 2). У многопозиционных кодов k > 2. Наиболее распространены двоичные коды, так как они имеют наиболее простую кодирующую и декодирующую аппаратуру. В дальнейшем рассматриваются двоичные коды и качества импульсов тока в них обозначаются абстрактно как 0 и 1 (это могут быть отрицательная и положительная полярность, малая и большая амплитуда тока и др.). Важнейшей особенностью кодов является их классификация по помехоустойчивости. Коды делятся на обыкновенные и корректирующие. Обыкновенные коды не обеспечивают защиту от искажений сигналов в результате воздействия помех в линии связи. При искажении трехэлементного кодового слова в двоичном коде с амплитудными качествами (рис. 11.2)
на ПУ формируется слово 010, но в результате искажения из-за помех в линии связи подавляется амплитуда второго импульса, и на КП поступает слово 000. В результате искажается информация и ложно включается объект 1 вместо 3. Корректирующие коды обеспечивают защиту от искажений (корректируют их). Так как борьба с помехами основная проблема теории кодирования, то все большое разнообразие кодов, используемое в современных системах телемеханики, связано с их различными корректирующими способностями. поэтому рассмотрим именно с этой точки зрения основные коды, которые нашли применение в системах железнодорожной автоматики и телемеханики. Для оценки кодов используем две основные характеристики. Емкость кода S – число сообщений, которые передаются данным кодом; это число равно числу используемых кодовых слов. Избыточность кода
где n – число элементов кода; m – минимальное число элементов кода, необходимое для передачи S сообщений. |
9. Обыкновенные коды. В обыкновенных кодах для передачи сообщений используют все возможные кодовые слова. Поэтому применяют и другие названия – коды без избыточности, коды на все сочетания. Емкость двоичного обыкновенного кода
Равенство (11.2) есть условие неизбыточности двоичного кода. Двоичный обыкновенный код есть множество всех n-разрядных двоичных чисел. Если надо передать S сообщений, то число разрядов обыкновенного кода
где ]a[
- обозначение ближайшего к a
целого числа
Формула (11.4) определяет минимальное число элементов кода, необходимое для передачи S сообщений среди всех кодов. Поэтому выражение для избыточности кода (11.1) принимает вид
Избыточность обыкновенного кода Вероятность возникновения ошибки при передаче сообщений обыкновенным кодом линейно возрастает с увеличением длины кода. Другими словами, чем больше информации надо передать, тем менее надежно она передается. Это недостаток обыкновенного кода. Тем не менее, обыкновенный код широко используется, если величина q достаточно мала, так как имеет наибольшую емкость среди всех кодов и самую простую аппаратуру кодирования и декодирования. |
|||||||||||||||||||||||
|
16. Линейные устройства К линейным устройствам относятся: линейная цепь, связывающая ПУ и КП; линейные питающие устройства; линейные приборы, формирующие и фиксирующие импульсы тока, передаваемые по линейной цепи. Рассмотрим линейные цепи, применяемые в системах железнодорожной автоматики. Линейная цепь с последовательным включением линейных реле, примененная в диспетчерской централизации временно́го кода, является нормально-замкнутой, поскольку в исходном положении обтекается током. Для передачи сообщений используют временные качества тока. В нормальном состоянии ток в линии не протекает и поэтому отсутствует контроль ее обрыва. Не требуется также высокое напряжение линейной батареи. Общим недостатком линейных цепей, у которых в качестве линейных приборов используют реле, является низкое быстродействие. В быстродействующих системах применяются бесконтактные линейные цепи. |
15. Структура телемеханической системы Для осуществления телемеханического способа управления объектами система управления должна содержать определенный набор функциональных узлов (рис. 12.1).
12.1. Структурная схема телеуправления В структурной схеме телеуправления выделяют пункт управления ПУ и контрольный пункт КП. На ПУ передаваемое сообщение (приказ) кодируется и посылается в линию связи в виде серии импульсов, которые обладают определенными признаками. На КП эти импульсы воспринимают специальные устройства, декодируют их и приводят в действие управляемый объект УО. Аппаратура пункта управления включает в себя следующие функциональные узла: пусковой узел П, который воспринимает команды с пульта управления и запускает кодирующие устройства; генератор Г, вырабатывающий импульсы тока, используемые для передачи по линии связи; кодер К (шифратор) для кодирования сообщения (придает импульсам тока определенные качества); распределитель Р, осуществляющий пространственное или временно́е разделение сигналов; линейный узел Л, служащий для согласования кодирующих устройств с линией связи. Аппаратура на контрольном пункте включает в себя: линейный узел Л, который воспринимает импульсы тока из линии связи и фиксирует их качества; декодер Д (дешифратор), который осуществляет декодирование принятого кодового сообщения, т.е. определяет объект, которому передается приказ, и формирует сигнал включения этого объекта; защитный узел З, предназначенный для обнаружения или исправления ошибок, возникающих при передаче сообщений; его структура определяется особенностями используемого кода. |
||||||||||||||||||||||||
|
13. Сменно-качественный код.
Сменно-качественный
код является примером недвоичного
кода с избыточностью. В этом коде два
последних элемента кодового слова
всегда различаются по качеству. Поэтому
основание кода
Достоинством сменно-качественного кода является отсутствие интервалом между импульсами тока (рис. 11.10),
поскольку они различаются своим качеством. Это сокращает время передачи сообщения примерно в 2 раза. Процесс формирования кодовых слов начинается с выбора качества первого элемента Существует k вариантов выбора качества первого элемента и все слова разбиваются на k групп. Затем выбирается качество второго элемента. Существует k-1 вариант выбора и т.д. Для каждого последующего элемента существует k-1 вариант выбора. Поэтому емкость сменно-качественного кода
Сменно-качественный код обнаруживает ошибки, в которых нарушается чередование качеств, и не обнаруживает ошибки, если чередование качеств сохраняется Смена качеств используется и в двоичных частотных кодах для того, чтобы не делать интервалов между импульсами тока. |
|||||||||||||||||||||||||
|
10. Коррекция ошибок в избыточных кодах. Коррекция ошибок может быть двух видов: обнаружение и исправление. При обнаружении устанавливается факт наличия ошибки, но не указываются номера искаженных разрядов. При исправлении эти номера должны быть определены и исправлены (это более сложная задача). Свойство коррекции ошибок – следствие избыточности кодов. Код является избыточным, если для передачи сообщений используются не все возможные кодовые слова. Условие избыточности двоичного кода
Для исправления
ошибок все множество слов S0
избыточного кода разбивается на S
непересекающихся подмножеств
содержащих по
|
|||||||||||||||||||||||||
|
14. Циклические коды. Циклические коды относятся к классу разделимых (n, m)-кодов, где n — длина кода, m — число информационных разрядов. Эти коды имеют сравнительно простые схемные и программные реализации кодирующих и декодирующих устройств и применяются в современных системах диспетчерской централизации. Название кода связано с тем, что его кодовые слова могут быть получены путем циклического сдвига одного кодового слова, которое называется образующим для данного кода. Сдвиг осуществляется справа налево. При этом крайний левый символ переносится на последнюю позицию справа. При описании циклических кодов n-разрядные двоичные векторы представляются в виде многочленов относительно фиктивной переменной х, которые расположены по убывающим степеням с коэффициентами 0 и 1. Вводятся три операции над многочленами. Операция сложения выполняется по правилам операции «сложение по модулю 2». Операция умножения выполняется по правилам
Операция деления выполняется по правилу
При делении многочленов старший член делимого делится на старший член делителя. Деление заканчивается, когда степень остатка становится меньше степени делителя. Имеет место равенство F(x) = P(x)Q(x) + R(x), (11.17) где F(x) —делимое, Р(х) —делитель, Q(x) — частное, R(x) — остаток. Если степень F(x) равна n, степень Р(х) равна к, то степень частного Q(x) равна п - к, а степень остатка меньше чем к. Рассмотренные операции над многочленами достаточно просто реализуются на регистрах сдвига с обратными связями, что и является причиной широкого применения циклических кодов. Идея построения циклических кодов состоит в следующем. В качестве разрешенных кодовых слов F(x) длины n выбираются такие, соответствующие многочлены которых делятся без остатка на некоторый порождающий многочлен Р(х) степени k (число контрольных разрядов кода).
Все многочлены
запрещенных кодовых слов без остатка
на многочлен Р(х)
не делятся. Это позволяет при приеме
кодовых слов обнаружить ошибку.
Если при приеме кода
В качестве
порождающего многочлена (делителя)
Р(х)
в циклических кодах выбирается
неприводимый
многочлен степени к, который является
делителем двучлена
При построении циклических кодов принято отводить под информационные m символов старших степеней многочлена, а под контрольные — к = m-n символов младших разрядов. Рассмотрим теперь процедуру декодирования. При приеме двоичного вектора F(x) осуществляется его деление на порождающий многочлен Р(х). Если кодовое слово принято без искажений, то остаток R(x) = 0 и делается вывод об отсутствии ошибки. Если R(x) ≠ 0, то ошибка есть.
Рассмотрим теперь
процедуру исправления одиночной
ошибки. Одиночная ошибка в разряде
кода хi
представляется многочленом Еi
(х) = хi.
Если в разрешенном кодовом слове с
многочленом F(x)
происходит искажение разряда хi,
то многочлен, соответствующий
искаженному слову,
Поскольку неискаженное кодовое слово F(x) делится на Р(х) без остатка, то остаток от деления (11.22) определяется остатком от деления вектора ошибки Ei(х) на Р(х), причем этот остаток не зависит от F(x). Это означает, что при искажении разряда хi в любом кодовом слове остаток от деления (11.22) будет один и тот же. Этот остаток называется «синдромом ошибки». Тем самым может быть определен номер i искаженного разряда.
|
11. Коды с обнаружением ошибок Каждый такой код должен обнаруживать все одиночные ошибки как наиболее вероятные. Кроме того, он может и исправлять некоторые ошибки. Код с контролем на четность. У этого кода все разрешенные кодовые слова содержать четное число единиц. Для его формирования к обыкновенному коду достаточно добавить один избыточный (контрольный) разряд. При приеме кода подсчитывают число единиц. Если оно четно, то сообщение принимается. Например, декодер (рис. 11.6)
решает данную
задачу, используя контакты поляризованных
реле Л1-Л3, которые фиксируют качества
импульсов тока. Полный декодер
обыкновенного трехэлементного кода
имеет восемь выходов, а данный декодер
имеет четыре выхода ( Обнаруживаются все ошибки, которые нарушают четность числа единиц. Это все ошибки нечетной кратности (в этом числе и одиночные). Равновесный код (код с постоянным числом единиц). У этого кода все кодовые слова имеют постоянное число единиц. Поэтому его еще называют кодом «m из n», так как каждое слово имеет m единиц из n разрядов. Число m называют весом кода. Код не является разделимым, т.е. его разряды нельзя разделить на информационные и контрольные. При приеме декодер (рис. 11.7)
подсчитывает число единиц и, если оно равно m, то сообщение принимается.
Не обнаруживаются
ошибки четной кратности, у которых
число искажений вида
Корреляционные коды. У этих кодов существует зависимость (корреляция) между определенными элементами кода. Примером является код с повторением, у которого каждое слово обыкновенного кода повторяется дважды. При приеме необходимо сравнить одинаковые элементы обоих частей кода и, если они совпадают, то сообщение принимается. Декодер в этом случае состоит из декодера обыкновенного кода (рис. 11.8, а), схемы сравнения (рис. 11.8, б)
11.8. Схемы декодера кода с повторением и схемы включения управляемых объектов (рис. 11.8, в). Не обнаруживаются только ошибки четной кратности, в которых присутствуют искажения одинаковых разрядов.
Код с суммированием
(код Бергера). Этот код позволяет
обнаруживать однонаправленные ошибки
любой кратности. Однонаправленными
называются кратные ошибки, содержащие
только искажения вида
Код с суммированием является разделимым и строится по следующим правилам:
1)сообщения
кодируются обыкновенным кодом. Число
информационных разрядов
2)число контрольных
разрядов
3)в контрольных разрядах записывается двоичное число, десятичный эквивалент которого равняется числу нулей в информационных разрядах. При приеме кода число нулей в информационных разрядах сравнивается с числом, записанным в контрольных разрядах. Декодер состоит из декодера обыкновенного кода (рис. 11.9, б),
11.9. Код с суммированием и схемы декодера декодера числа, записанного в контрольных разрядах (рис. 11.9, в) и схемы сравнения (рис. 11.9, г).
|
12. Код Хемминга
Код Хэмминга
исправляет
ошибки кратности 1 и является разделимым.
Число информационных разрядов
Для того, чтобы определить значения контрольных разрядов, составляют контрольные суммы Si. Сумма Si —это сумма по модулю два значений разрядов, двоичные номера которых имеют 1 на i-м месте справа. Сумма по модулю два равна 1, если число 1 в сумме нечетно, и равна 0, если число 1 четно. В каждую контрольную сумму входит только один контрольный разряд, и каждый контрольный разряд входит только в одну контрольную сумму. Это вытекает из того, что двоичные номера контрольных разрядов имеют только одну единицу. Указанное свойство позволяет доопределять контрольные разряды независимо друг от друга. Если все контрольные суммы равны 0, то ошибки нет. Если хотя бы одна из сумм равна 1, то есть ошибка. В этом случае контрольные суммы рассматриваются как разряды двоичного числа, десятичный эквивалент которого указывает номер искаженного разряда. Исправление ошибки состоит в изменении значения искаженного разряда на противоположное. Для определения параметров кода Хэмминга выразим число т через п:
Отсюда
|
|||||||||||||||||||||||
|
22. Мультиплексоры и демультиплексоры Мультиплексор (коммутатор каналов) осуществляет подключение одного из нескольких каналов к общему выходу. Для получения мультиплексора с большим числом входов строится мультиплексорное дерево. Демультиплексор решает задачу обратную задаче мультиплексора - передает последовательные данные с одного входа на несколько выходов. Чтобы ограничить число выводов микросхем, данные можно передавать последовательно во времени по одному проводу с использованием мультиплексора и демультиплексора, однако это уменьшает скорость передачи данных. Мультиплексоры могут использоваться в качестве преобразователя параллельного кода в последовательный код, также как и регистры сдвига. Коммутатор на логических элементах. В общем случае коммутатор это тот же мультиплексор. Отличие только в режимах работы. Если мультиплексор обеспечивает последовательное переключение каналов, то коммутатор кроме мультиплексного режима позволяет одновременное соединение разного количества входов и выходов (микширование).
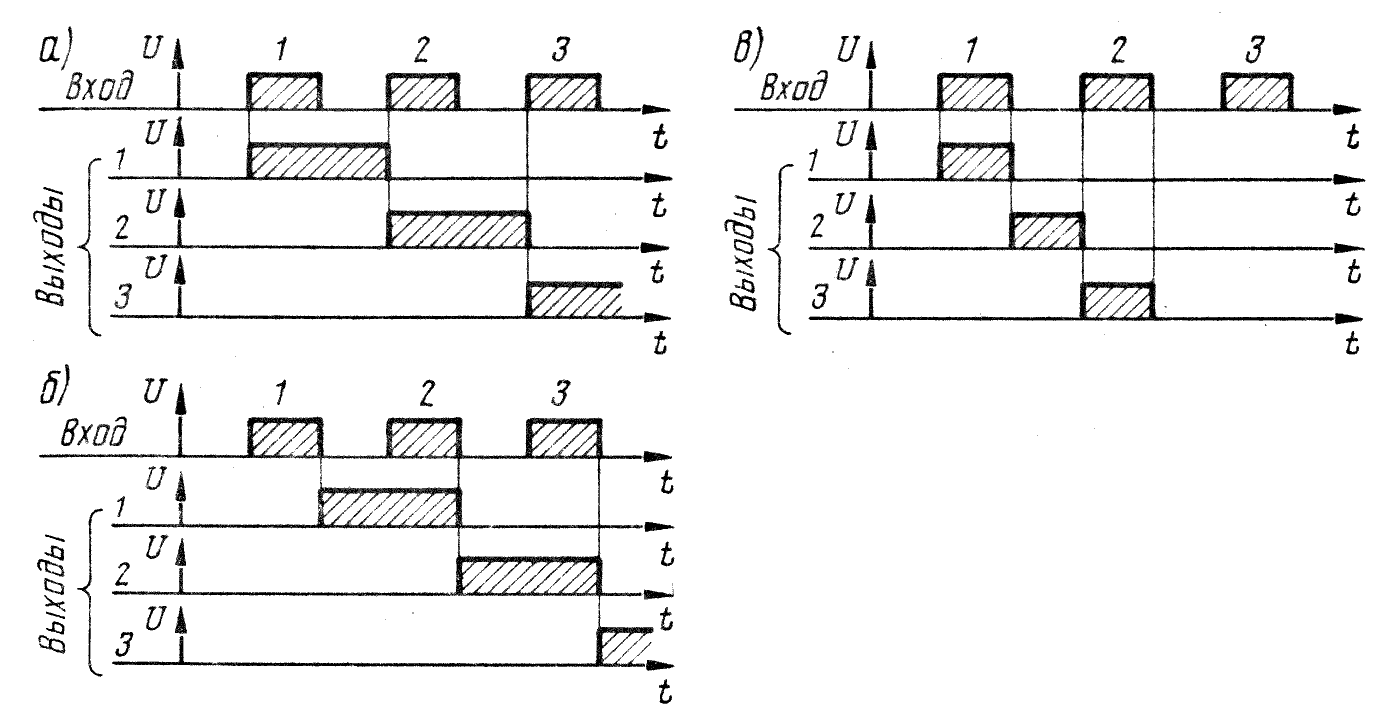
17. Распределители Распределитель осуществляет временно́е или пространственное разделение импульсов тока. Наиболее часто в системах ТУ–ТС используется пространственно-временно́е разделение. В зависимости от момента переключения с одной позиции (выхода) на другую распределители делятся на три группы. В распределителях с прямым ходом переключение происходит в момент поступления импульсов (рис. 12.7, а).
12.7. Временные диаграммы работы распределителя Распределители с обратным ходом переключаются в момент наступления интервалов между импульсами (рис. 12.7, б), а распределители с двойным ходом – во время импульсов и во время интервалов (рис. 12.7, в). Распределители классифицируются также в зависимости от принципа работы счетчика. Различают распределители, работающие, используя унитарный код, двоичные, в которых счет осуществляется с использованием двоичного кода, и программируемые, в которых счет осуществляется по специальной программе. Диоды и резисторы обеспечивают замедление на отпускание каждого реле-счетчика, что необходимо для надежного его включения через контакт предыдущего реле-счетчика.
Каждый триггер
счетчика переключается с поступлением
на вход одного из фронтов (отрицательного)
входного импульса и поэтому работает
с частотой в 2 раза меньшей, чем
предыдущий триггер. Аналогично
изменяются разряды при перечислении
двоичных чисел. Счетная схема считает
импульсы (интервалы) в двоичном коде,
и каждый триггер представляет собой
разряд двоичного числа. Если счетчик
имеет n
триггеров, то число позиций распределителя
Счетная схема делит частоту входных импульсов в 2n раз. Обычно в интегральной технике распределители не изготавливают не в виде отдельных микросхем, а собирают из микросхем, реализующих функции счетчика и декодера по отдельности. Бесконтактные распределители, работающие с использованием унитарного кода, строят на базе сдвиговых регистров. Регистры выполняются в виде отдельных микросхем. |
18. Программируемые распределители Распределители, работающие с использованием двоичного кода, имеют 2n позиций. Это число в системы ТУ–ТС обычно должно быть равно длине используемого кода. Поэтому возникает задача построения распределителя (а фактически счетчика) с модулем счета не равным 2n. Такие распределители называют программируемыми.
В интегральной
технике применяются три способа
программирования счетчика на
произвольный модуль счета
Второй способ
состоит в предварительной (до начала
счета) загрузке дополнения (числа
В третьем способе программирования исключаются промежуточные состояния.
Особым видом
программируемых счетчиков являются
реверсивные, которые могут работать
в режиме сложения или вычитания в
зависимости от значения управляющего
сигнала
|
19. Генераторы Генераторы в системах ТУ–ТС используются для выполнение двух функций. Тактовые генераторы определяются временные такты функционирования системы. Они управляют работой счетчика или распределителя и обеспечивают синхронизацию. Генераторы качеств формируют импульсы тока с определенным качеством и воздействуют на линейные устройства. Генератором называется устройства, которое, благодаря энергии непериодического источника питания, создает периодически изменяющееся электрическое напряжения или ток и обеспечивает периодическое замыкание и размыкание электрической цепи (рис. 12.24, а).
12.24. Схема включения генератора и формы генерируемых импульсов
В зависимости от
формы генерируемых импульсов различают
генераторы синусоидальных колебаний
(рис. 12.24, б) и релаксационные генераторы.
Последние генерируют импульсы
специальной формы с наличием скачков
– прямоугольные, экспоненциальные,
пилообразные (рис. 12.24, в, г, д) и др. При
этом импульсные последовательности
характеризуются длительностями
импульса tи
и паузы tп,
периодом колебаний
В бесконтактной технике аналогами пульс-пары являются мультивибраторы. Простейшая схема мультивибратора состоит из двух инверторов с емкостными обратными связями. При включении питания эта схема оказывается в состоянии неустойчивого равновесия, когда оба транзистора открыты с некоторой степенью насыщения. Среди генераторов качеств наибольшее распространение в системах диспетчерских централизаций имеют частотные генераторы.
|
|||||||||||||||||||||||
|
20. Кодеры и декодеры Кодер (шифратор) служит для формирования всего множества кодовых слов, используемых в системе ТУ–ТС. Совместно с распределителем кодер осуществляет управление генератором качеств для придания импульсам тока определенных качеств согласно передаваемому сообщению. Обычно интегральные кодеры являются приоритетными. Это означает, что если на несколько входов будет подан активный сигнал логического 0, то приоритет отдается входу с большим номером.
Приоритетный
кодер имеет два дополнительных выхода:
Декодер (дешифратор) выполняет две функции – фиксирует качества импульсов тока в порядке их следования и осуществляет декодирование сообщения, т.е. образует выходную цепь для воздействия на управляемый объект. Рассмотрим разновидности декодеров обыкновенного кода. В схеме прямоугольного декодера трехэлементного обыкновенного кода выходная цепь реализует конъюнкцию от трех переменных. Недостатком такого декодера является большое число контактов, которое определяется по формуле:
где 2n – число выходных цепей, n – число контактов в одной цепи. Чтобы уменьшить число контактов, применяют пирамидальный декодер (рис. 12.32, б), у которого
Число N
– сумма геометрической прогрессии с
основанием
Число диодов
прямоугольного диодного дешифратора
также определяется по формуле
В интегральном исполнении выпускаются декодеры обыкновенного кода. Наличие трех входов управления позволяет получать декодеры четырехэлементного (на 16 выходов) и пятиэлементного (на 24 и 32 выходов) в результате параллельного соединения микросхем. |
21. Кодер и декодер для циклических кодов
|
23. Одновибраторы Коммутатор на логических элементах. В общем случае коммутатор это тот же мультиплексор. Отличие только в режимах работы. Если мультиплексор обеспечивает последовательное переключение каналов, то коммутатор кроме мультиплексного режима позволяет одновременное соединение разного количества входов и выходов (микширование). Укорачивающие одновибраторы Если бы логические элементы не обладали задержкой, то на выходе такой схемы постоянно присутствовал единичный логический уровень. Однако это не так. Сигнал на выходе инвертора задержан по отношению к его входу.
Длительность
импульса равна времени разряда
конденсатора до порогового значения. Расширяющие одновибраторы (ждущие мультивибраторы) В расширяющих одновибраторах (ждущих мультивибраторах) длительность входного (запускающего) импульса должна быть короче длительности формируемого импульса. Схема расширяющего одновибратора приведена на рисунке 5. Он выполнен на двух логических элементах. Схема охвачена положительной обратной связью, так как выход второго элемента соединен с входом первого.
|
|||||||||||||||||||||||
|
24. Методы синхронизации телемеханических систем Система ТУ—ТС с временным разделением сигналов содержит распределители на ПУ и КП. Распределители являются основными элементами, от устойчивости и надежности их работы зависит достоверность передачи информации. Они должны работать синхронно и синфазно. В этом случае распределители одновременно переключаются с одной позиции на другую, что обеспечивает согласованное подключение к линии связи соответствующих элементов передающей и приемной аппаратуры на ПУ и КП. В этом случае распределители одновременно переключаются с одной позиции на другую, что обеспечивает согласованное подключение к линии связи соответствующих элементов передающей и приемной аппаратуры на ПУ и КП. Рассогласовывание распределителей на ПУ и КП может происходить из-за несовпадения тактовых частот генераторов, управляющих распределителями, из-за влияния временных задержек аппаратуры, а также по причине отказов и сбоев. При этом нарушается синфазность по импульсам, когда переход на новую позицию одного распределителя по отношению к другому задерживается на время т. С увеличением числа импульсов в цикле эта задержка растет (накапливается). Последнее может привести к нарушению синхронизации распределителей по циклу, когда одновременно распределители находятся на разных позициях, в результате чего в системе передаются ложные сообщения. Обычно в системе ТУ—ТС достаточно обеспечить синхронизацию распределителей, так как нарушение синфазности т невелико по сравнению с длительностью импульса и за время цикла не приводит к искажению передаваемой информации. Существуют три основных способа синхронизации распределителей.
|
25. Системы с временным разделением сигналов В системе с распределительной селекцией (для передачи команды ТУ) (рис. 13.3)
Рис. 13.3. Структурная схема системы с распределительной селекцией на ПУ команды от органов управления фиксируются в регистре 1. Если цикл работы системы содержит n импульсов, то регистр 1 имеет n триггеров, состояние 0 или 1 которых определяет качество (0 или 1) соответствующего импульса. Тактовый генератор ТГ1 управляет работой распределителя 1, который осуществляет пространственно-временное разделение сигналов и имеет n позиций. Сигналы с выходов триггеров регистра 1 и соответствующих им выходов распределителя подаются на входы схем И. Сигнал логической 1 на выходе схемы И появляется, если соответствующий импульс тока в кодовом цикле передается с качеством 1. Этот сигнал через схему ИЛИ поступает на модулятор М, который управляет работой генератора качеств ГК. В этом случае генератор вырабатывает импульс с качеством 1. Линейный блок ЛБ1 обеспечивает согласование входного сопротивления генератора ГК и входного сопротивления линии связи. На контрольном пункте импульсы тока из линии связи воспринимаются линейным блоком ЛБ2 и их качества определяются с помощью демодулятора ДМ. Если импульс тока имеет качество 1, то на выходе ДМ появляется сигнал логической 1. Тактовый генератор ТГ2 управляет распределителем Р2, который имеет n позиций и работает синхронно и синфазно с распределителем Р1. Сигналы с выходов демодулятора и выходов распределителя подаются на входы схем И. Сигнал логической 1 на выходе схемы И появляется, если соответствующий импульс тока в кодовом цикле был передан с качеством 1. Этот сигнал поступает на вход соответствующего триггера регистра 2 и переключает его в состояние 1. Таким образом, после завершения цикла работы системы содержимое регистра 2 повторяет содержимое регистра 1. Сигналы с выходов регистра 2 передаются на управляемые объекты. Система с кодовой селекцией (при использовании обыкновенного кода) (рис. 13.4)
отличается от системы с распределительной селекцией (см. рис. 13.3) наличием кодера на ПУ и декодера на КП. Регистр 1на ПУ фиксирует одно из 2n сообщений, которое требуется передать. Кодер преобразует данное сообщение в соответствующее ему двоичное n-разрядное кодовое слово, которое передается по линии связи. На КП принятое кодовое слово записывается в регистре 2. Декодер преобразует данное кодовое слово в сообщение. На одном из его 2n выходов появляется сигнал логической 1, воздействующий на управляемый объект. Система с кодово-распределителъной селекцией (рис. 13.5)
является сочетанием двух рассмотренных систем. Кодовое слово при этом делится на две части. Избирательная часть содержит n1 импульсов тока, которые передаются по принципу кодовой селекции. Исполнительная часть содержит п2 импульсов тока, передаваемых по принципу распределительной селекции. |
26. Системы телеизмерения, их классификация и характеристики основной характеристикой СТИ является точность. Точность характеризуется статической погрешностью, или просто погрешностью. Погрешность — степень приближения показаний приемного прибора к действительному значению измеряемой величины. Погрешность телеизмерения определяют как максимальную разность между показаниями выходного прибора на приемной стороне и действительным значением телеизмеряемой величины, определяемым по показаниям образцового прибора. Абсолютная основная погрешность канала телеизмерения устройства (комплекса) — наибольшая разность выходной величины, приведенной к входной в соответствии с градуировочной характеристикой, и входной величины:
Относительная
погрешность
Приведенная
погрешность
Абсолютная дополнительная погрешность канала телеизмерения устройства — наибольшая разность значений входной (выходной) величины при нормальных условиях и при воздействии влияющего фактора. Дополнительные погрешности вызываются различными отклонениями от нормальных условий работы, например изменением температуры окружающей среды, изменением напряжения питания за допустимые пределы, появлением помех, внешних магнитных полей и т. п. Они бывают четырех видов: интенсивности, импульсные, частотные и цифровые. В системах интенсивности измеряемая величина на передающем пункте преобразуется в уровень напряжения или тока в линии связи. На приемном пункте выполняется обратное преобразование. В импульсных системах измеряемая величина преобразуется в некоторый параметр (амплитуда, длительность, частота) импульсной последовательности, в частотных системах—в частоту переменного тока в линии связи. По методам воспроизведения измеряемой величины системы телеизмерения подразделяют на аналоговые и ц и ф р о вы е. В цифровых системах осуществляются следующие преобразования: измеряемая величина —»кодовое слово -> измеряемая величина. Используя для передачи кодовых слов корректирующие коды можно обеспечить высокую точность и помехозащищенность передачи информации об аналоговом сигнале. Данное преобразование состоит из 3 процессов: дискретизация, квантование и кодирование. Дискретизация непрерывного сигнала состоит в том, что его значение передается дискретно во времени, то есть в отдельные моменты времени. Шаг квантования можно определить из теоремы Котельникова, смысл которой заключается в следующем: любая непрерывная функция, спектр которой ограничен частотой Fmax, может быть полностью восстановлена по ее дискретным значениям, взятым через интервалы времени
Однако имеется ряд затруднений для практического применения этой теоремы, связанных с тем, что все сообщения, передаваемые в телемеханике, ограничены во времени. Это обычно видео- или радио-импульсы длительностью т, у которых согласно спектр бесконечен. Поэтому представляет значительные трудности выбор значения Fmax для функций, ограниченных во времени. квантование в телемеханике используется главным образом для телеизмерений, где передаваемые функции в большинстве случаев плавно изменяются во времени и имеют достаточно сосредоточенный спектр. Восстановить квантованную по времени функцию на приемной стороне можно с помощью ступенчатой или линейной интерполяции либо методом Котельникова. Чаше всего применяют ступенчатую интерполяцию и наиболее редко — фильтрацию по Котельникову. Квантование непрерывного сигнала состоит в том, что его значение передается дискретно по величине. Для этого выбирается некоторый шаг квантования q, от которого зависит число уровней квантования. Что касается точности преобразования (квантования), то обычно она задается в виде приведенной относительной погрешности δку (в процентах). Погрешности, возникающие от одновременного квантования по уровню и по времени, сначала находят поочередно для каждого из видов квантования. Неравномерное квантование по уровню. Рассмотренное квантование производилось с постоянным шагом q, вследствие чего квантованная функция состояла из одинаковых по высоте ступенек. Однако некоторые функции, подлежащие квантованию, изменяются, так что их целесообразно квантовать с различными приращениями уровней, т. е. с переменным шагом квантования q1, q2, .... qn. Квантование по уровню осуществляется для последующей передачи с помощью дискретных сигналов. На приемной стороне принятая квантованная функция в своем первоначальном («непрерывном») виде обычно не восстанавливается, хотя в принципе это возможно путем ступенчатой, линейной или более сложной интерполяции. Кодирование непрерывного сигнала состоит в том, что его дискретные значения (уровни квантования) преобразуются в двоичные кодовые слова. Эти кодовые слова последовательно передаются по линии связи. На приемном пункте по кодовому слову определяется уровень квантования и непрерывный сигнал восстанавливается. |
|||||||||||||||||||||||
|
27. Цифровое преобразование измеряемой величины Преобразование непрерывной аналоговой величины в цифровой эквивалент — код — осуществляется с помощью аналого-цифровых преобразователей (АЦП). Как и в предыдущих импульсных устройствах ТИ, измеряемая величина может быть представлена в виде механического перемещения (углового или линейного) либо в виде электрической величины. При преобразовании электрических величин в код различают преобразование с промежуточным параметром и непосредственное преобразование напряжения в код. В первых устройствах измеряемая электрическая величина (обычно напряжение, хотя могут преобразовываться также ток и сопротивление) преобразуется во вспомогательный параметр (временной интервал, частоту или фазу), преобразуемый, в свою очередь, в число импульсов, которое далее кодируется. Непосредственное преобразование напряжения в код. В этих преобразователях образуемый в кодирующем устройстве код преобразуется в напряжение, которое сравнивается с измеряемым напряжением. При равенстве напряжений образование кода прекращается и он подается на выход.
|
28. Аналого-цифровые и цифро-аналоговые преобразователи Аналого-цифровые преобразователи (АЦП) бывают нескольких типов (с последовательным приближением, с параллельным преобразованием, с двойным интегрированием следящего типа, сигма-дельта АЦП). Наибольшим быстродействием и самой низкой разрядностью обладают АЦП прямого (параллельного) преобразования. Среднюю нишу в ряду разрядность-скорость занимают АЦП последовательного приближения. Наибольшей точности достигают сигма-дельта АЦП. Принцип действия АЦП предельно прост: входной сигнал поступает одновременно на все «плюсовые» входы компараторов, а на «минусовые» подается ряд напряжений, получаемых из опорного путем деления резисторами R. Приоритетный шифратор (priority encoder) сформирует из «столбца» единиц двоичный код, который фиксируется выходным регистром. Теперь становятся понятны достоинства и недостатки такого преобразователя. Все компараторы работают параллельно, время задержки схемы равно времени задержки в одном компараторе плюс время задержки в шифраторе. Компаратор и шифратор можно сделать очень быстрыми, в итоге вся схема имеет очень высокое быстродействие. Но для получения N разрядов нужно 2N компараторов (и сложность шифратора тоже растет как 2N). ЦАП. На цифровые входы поступает четырехразрядное кодовое слово (2°, 21, 22, 23 — веса разрядов двоичного числа). Всего на вход может поступить 16 двоичных чисел. Каждому числу на аналоговом выходе ЦАП (выходе операционного усилителя ОУ) соответствует свой уровень аналогового сигнала (уровень квантования). Это обеспечивается за счет параллельного включения резисторов, сопротивление которых изменяется по закону 2nR. каждому двоичному числу на выходе ЦАП соответствует свой уровень напряжения.
|
29. Структура телеизмерительных систем Измеряемые аналоговые величины через управляемый распределителем коммутатор поочередно поступают на АЦП, в котором преобразуются в последовательный двоичный код (если АЦП выдает параллельный код, то до кодера нужна установка схемы, преобразующей параллельный код в последовательный). В кодере двоичный код преобразуется в один из помехозащищенных кодов, который поступает в линейный блок ЛБ, где происходит формирование и усиление импульсов. В случае необходимости передача импульсов по линии связи может происходить с частотным наполнением, для чего после ЛБ устанавливают модулятор и генератор частоты, а на КП — демодулятор. Приходящие на ПУ из линии связи, несколько искаженные из-за помех импульсы, восстанавливаются в ЛБ и поступают на декодер. Одновременно происходят синхронизация распределителей и синфазирование генераторов. После декодирования информационные символы могут поступать на блоки цифрового или аналогового воспроизведения информации или на оба сразу, а также в ЭВМ. Каждая кодовая комбинация (КК), соответствующая определенной измеряемой величине, записывается в индивидуальный регистр. При цифровом воспроизведении КК предварительно проходит через блок масштабирования. Очередность записи КК в регистры исходит от распределителя. Перед поступлением на стрелочные приборы КК предварительно преобразуется в среднее значение тока в ЦАП. При цифровом воспроизведении измеряемой величины КК поступает сначала в дешифратор Дш, в котором возбуждается выход, соответствующий ее значению, и далее воспроизводится на индикаторе в виде цифры. Величины, поступающие на приборы и индикаторы, могут одновременно регистрироваться.
ГТИ – генератор тактовых импульсов; ПК – преобразователь параллельного кода в последовательный и обратно (в приемнике); ЛБ – линейный блок; ФСС – формирователь синхронизирующего сигнала; БМ – блок масштабирования; Р – регистр; ДШ – дешифратор; ВСС – выделитель синхронизирующего сигнала. АЦП применяются в современных системах телеизмерений, как в виде отдельных элементов, так и интегрированными в состав микропроцессорных контроллеров. В качестве измерительных устройств в данных системах используются микроконтроллеры, как со встроенными, так и отдельными АЦП. |
|||||||||||||||||||||||
|
30. Обеспечение условий безопасности при подключении систем ТУ и ТС Система ТУ—ТС с временным разделением сигналов содержит распределители на ПУ и КП. Распределители являются основными элементами, от устойчивости и надежности их работы зависит достоверность передачи информации. Они, должны работать синхронно и синфазн. В этом случае распределители одновременно переключаются с одной позиции на другую, что обеспечивает согласованное подключение к линии связи соответствующих элементов передающей и приемной аппаратуры на ПУ и КП Обычно в системе ТУ—ТС достаточно обеспечить синхронизацию распределителей, так как нарушение синфазности т невелико по сравнению с длительностью импульса и за время цикла не приводит к искажению передаваемой информации. Существуют три основных способа синхронизации распределителей. Пошаговая синхронизация удобна при спорадической передаче команд ТУ и ТС, когда распределители нормально находятся в заторможенном состоянии. Этот способ синхронизации также снимает проблему синфазности по импульсам, которая трудно разрешима при использовании релейной аппаратуры. При циклической передаче команд в системе ТУ—ТС используется цикловая синхронизация. Структурная схема трактов ТУ-ТС
Тракт ТУ. М – манипулятор, при помощи которого диспетчер формирует сигнал ТУ, (клавиатура). НГ – наборная группа, которая физически формирует сигнал (релейные системы, микропроцессоры). Ш – шифратор, служит для придания импульсов кода активных признаков. («+» активный признак, « - « пассивный признак). ТГ – тактовый генератор. Р – распределитель, синхронизирует работу ЦП и ЛП. Г(М) – генератор (модулятор). ЛУ – линейное устройство. На линейном пункте: ДМ – демодулятор. РР – регистрирующее реле. (Определяет принят ли код). ДШ – дешифратор. УР – управляющее реле. ОУ – объект управления. Тракт ТС. Т – табло. КР – контролирующее реле, контролирует состояние объектов. НР – начальное реле, фиксирует начало передачи сигнала ТС.
|
31. Основные понятия и термины надежности В случае нарушения работоспособности наступает отказ. В теории надежности в качестве события рассматривается отказ, т. е. событие, исходом которого является переход объекта в неработоспособное состояние. Неработоспособным называется состояние, когда объект не способен выполнять заданные функции, а работоспособным — состояние, при котором он выполняет свои функции. По характеру возникновения отказы делят на внезапные и постепенные. Внезапные, или полные, отказы характеризуются резким, скачкообразным изменением одного или нескольких параметров объекта. Постепенные, или параметрические, отказы характеризуются зависимостью сравнительно медленного изменения параметров объекта от времени эксплуатации и вызываются старением, изнашиванием, а также разрегулированием. Необратимый отказ свидетельствует о потере работоспособности. Перемежающийся - многократно возникающий самоустраняющийся отказ объекта одного и того же характера. Если отказ объекта не обусловлен отказом другого объекта, то его считают независимым, в противном случае — зависимым. Отказ, возникший в результате несовершенства или нарушения установленных правил и норм конструирования, называют конструктивным. Отказ, возникший в результате несовершенства или нарушения установленного процесса изготовления или ремонта объекта, выполненного на ремонтном предприятии, - технологический. Отказ, возникший в результате нарушения установленных правил или условий эксплуатации - эксплуатационный. Цена отказа - простой подвижного состава в случае восстановления работоспособности оборудования и невыполнение задания при отправке на ремонтную базу. В отдельных случаях - аварийный исход. Системы и элементы после отказа могут подвергаться или не подвергаться замене или ремонту. В первом случае они называются восстанавливаемыми, во втором — невосстанавливаемыми. Надежность — комплексное свойство, которое в зависимости от специфики объекта и условий его эксплуатации может включать в себя: безотказность, долговечность, ремонтопригодность, сохраняемость в отдельности или в определенном сочетании, причем как для объекта, так и для отдельных его частей. Безотказность — свойство технических объектов непрерывно сохранять работоспособность в течение некоторого времени (рейса, навигации) . Это наиболее важная составляющая надежности объектов, зависящая от безотказности элементов, деталей, схемы их соединения, конструктивных и функциональных особенностей, условий эксплуатации. Долговечность — свойство технических объектов сохранять работоспособность до наступления предельного состояния при установленной системе технического обслуживания и ремонта. В рассматриваемом случае предельное состояние объектов определяется невозможностью их дальнейшей эксплуатации, что обусловливается либо снижением эффективности, либо требованиями безопасности, либо наступлением морального старения. Ремонтопригодность — свойство объектов, заключающееся в приспособленности к предупреждению и обнаружению причины возникновения отказов и устранению их последствий путем ремонтов. Ремонтопригодность характеризует большинство элементов объектов и не имеет смысла только для тех средств, которые не ремонтируются в процессе эксплуатации. Сохраняемость — свойство объектов непрерывно сохранять работоспособное состояние в течение хранения и транспортировки. Сохраняемость технических объектов характеризуется их способностью противостоять отрицательному влиянию условий хранения и транспортирования.
|
32. Показатели надежности невосстанавливаемых элементов Различные показатели невосстанавливаемых объектов являются характеристиками случайной величины Т — наработки объекта до отказа. Под наработкой понимают продолжительность, или объем работы в часах, циклах, километрах или в других единицах. Одним из распространенных количественных критериев надежности является функция ненадежности (функция распределения случайной величины Т, вероятность отказа), которая определяется как вероятность того, что наработка до отказа меньше заданной наработки t, отсчитываемой от начала эксплуатации:
Функция надежности (вероятность безотказной работы) определяет вероятность того, что наработка до отказа Т больше заданной наработки t, отсчитанной от начала эксплуатации:
Во многих задачах
в качестве показателя надежности
используется условная
вероятность безотказной работы
объекта в течение интервала времени
Широкое распространение имеет следующий показатель надежности — плотность распределения наработки до отказа (частота отказов).
Важной характеристикой
надежности является интенсивность
отказов
λ(t).
Она определяется вероятностью того,
что в некотором интервале времени
Средняя наработка до отказа Т0 — это математическое ожидание наработки до первого отказа. Математическое ожидание представляет собой среднее значение случайной величины.
|
|||||||||||||||||||||||
|
33. Показатели надежности восстанавливаемых элементов Для восстанавливаемых объектов используют три группы показателей: - безотказности, - ремонтопригодности и комплексные. К показателям безотказности относятся: - Поток отказов ω(t) - среднее число отказов в единицу времени, взятое для рассматриваемого момента времени. - Вероятность безотказной работы для простейшего потока отказов - Наработка на отказ Тн определяется как отношение наработки восстанавливаемого объекта к математическому ожиданию числа его отказов в течение этой наработки. К показателям ремонтопригодности относятся: Вероятность восстановления — то, что фактическая продолжительность работ по восстановлению работоспособности объекта Тв не превысит заданной Среднее время восстановления- — математическое ожидание времени восстановления работоспособности. К комплексным показателям готовности относятся: Функция готовности - вероятность нахождения объекта в работоспособном состоянии в момент времени t. Функция простоя - вероятность нахождения объекта в неработоспособном состоянии в момент времени t. Коэффициент готовности Коэффициент простоя
|
34. Структурная надежность систем Система с последовательным соединением элементов
С
Параллельно-последовательное соединение элементов
В
Определение показателей надежности систем со сложной структурой Метод перебора состояний.
В
вероятность любого состояния системы
(l и f — число соответственно работоспособных и неработоспособных элементов). Метод разложения структуры относительно базового элемента.
|
35. Методы повышения надежности телемеханических систем 1. Использование кодов с исправлением и обнаружением ошибок в линии связи. Элементом, защищающим объекты управления от неправильного срабатывания, является декодерю. Он включает УО только в том случае, если из линии поступает кодовое слово с определенным числом активных импульсов. В противном случае не включается ни один из УО; чем исключается неправильная реализация команды. 2. Резервирование элементов и узлов системы для устранения ошибок в аппаратуре . При возникновении неисправности в одном из распределителей на выходах элементов И осуществляется корректировка сигналов в соответствии с работой другого распределителя, который является исправным. При этом исключается неправильное воздействие на УО. 3. Резервирование с помощью мажоритарных элементов МЭ 4. Использование схем встроенного контроля СВК В этом случае система дополняется специальными схемами встроенного контроля СВК, которые предназначены для формирования сигнала ошибки (контроля) при возникновении неисправностей. Сигнал ошибки используется для исключения неправильного включения УО и включения сигнализации об отказе.
|
|||||||||||||||||||||||
|
36. Контроль кодеров, декодеров и распределителей Схема контроля кода или детектор решает задачу определения принадлежности кодового вектора рассматриваемому коду в отличие от декодера, который различает кодовые векторы друг от друга. Основные свойства декодеров избыточных кодов: - декодирование; - контроль входного вектора на выходе декодера (при поступлении на вход декодера не кодового слова на всех его выходах формируется сигнал логического 0). Контролировать работу распределителя можно осуществляя раздельную проверку счетчика и декодера. Для организации общего контроля телемеханической системы устанавливают контрольные схемы, проверяющие основные узлы системы. К ним относятся распределители, кодеры, декодеры и регистры хранения информации. Указанные контрольные схемы объединяются в одну контрольную схему для получения единого сигнала ошибки. При декодировании избыточных кодов возникает проблема контроля избыточных элементов в схемах декодирования. Декодеры обладают следующими основными свойствами: декодированием (при поступлении на вход декодера кодового слова на соответствующем ему выходе появляется сигнал логической 1); контролем входного вектора на выходе декодера (при поступлении на вход декодера не кодового слова на всех его выходах формируется сигнал логического 0). Неисправности избыточных элементов не приводят к нарушению правильной работы декодера при поступлении кодовых слов (сохраняется свойство декодирования), но искажают работу декодера при подаче некодовых слов (теряется свойство контроля входного вектора на выходе декодера). В результате этого при поступлении некодового слова на одном из выходов декодера формируется сигнал логической 1. Распределитель состоит из счетчика и декодера. Поэтому контролировать работу распределителя можно осуществляя раздельную проверку этих элементов. Для контроля работы счетчика могут быть использованы методы резервирования. У счетчиков с неполным использованием всех состояний правильность работы можно контролировать, применяя детектор неиспользованных состояний. Счетчики, работающие в обыкновенном коде, эффективно контролируются с помощью введения дополнительного разряда четности. |
|
|
|||||||||||||||||||||||
 10.1.Схемы
местного способа управления
10.1.Схемы
местного способа управления 10.2.
Схемы дистанционного способа управления
10.2.
Схемы дистанционного способа управления 10.5.
Структурные схемы телемеханических
сетей
10.5.
Структурные схемы телемеханических
сетей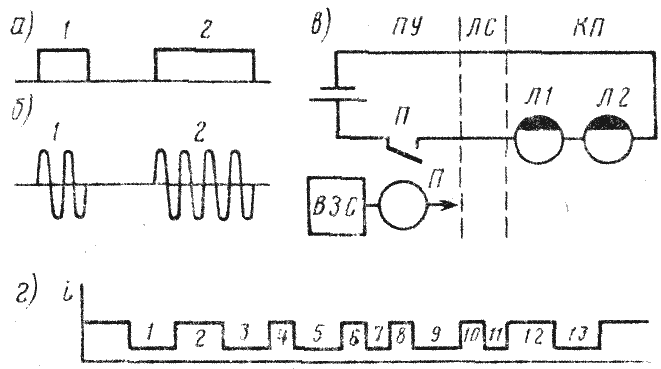 10.8.
Временные качества импульсов и схема
линейной цепи линии связи
10.8.
Временные качества импульсов и схема
линейной цепи линии связи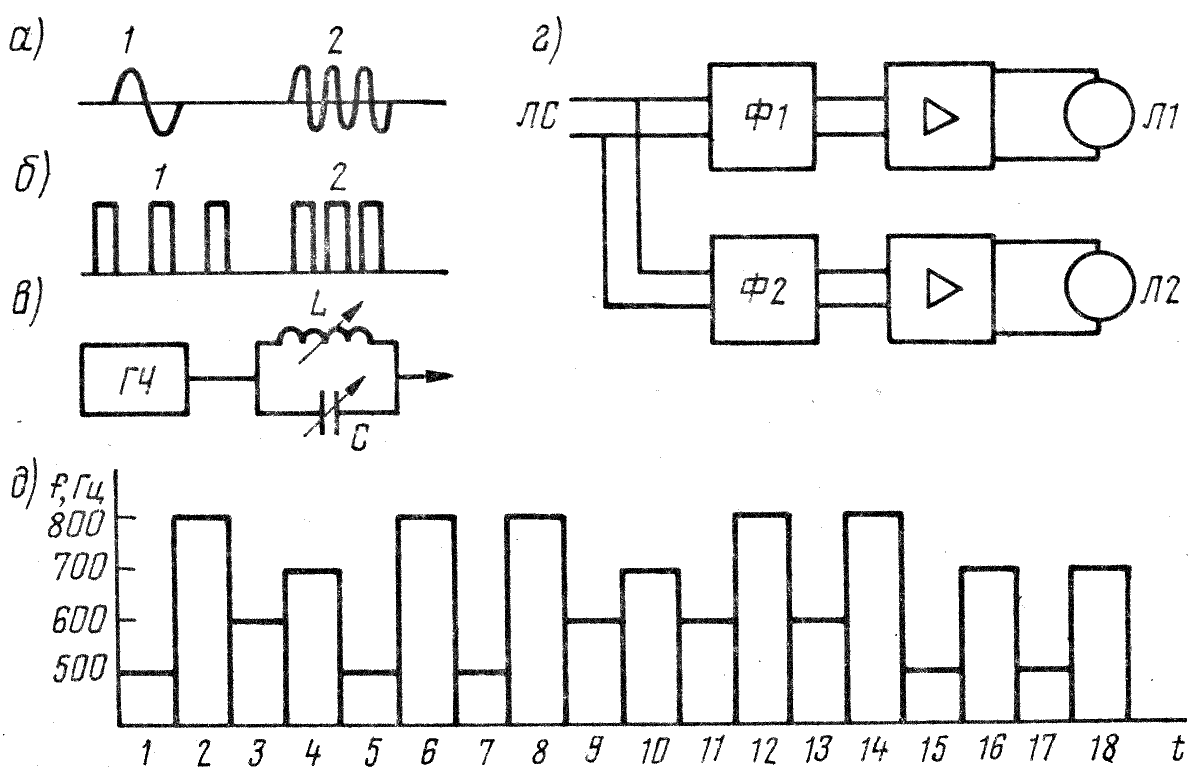 10.9.
Частотные качества импульсов и схемы
генератора переменного тока и включения
фильтров
10.9.
Частотные качества импульсов и схемы
генератора переменного тока и включения
фильтров
 10.15.
Схемы распределительной и кодовой
селекции; временные диаграммы их
работы
10.15.
Схемы распределительной и кодовой
селекции; временные диаграммы их
работы 10.14.
Схемы качественно-комбинационной
селекции
10.14.
Схемы качественно-комбинационной
селекции 10.16.
Структурная схема диспетчерской
централизации
10.16.
Структурная схема диспетчерской
централизации 10.11.
Полярные качества импульсов
10.11.
Полярные качества импульсов 11.5.
Схема передачи избыточного кода по
каналу связи
11.5.
Схема передачи избыточного кода по
каналу связи 11.6.
Схема декодера кода с контролем на
четность
11.6.
Схема декодера кода с контролем на
четность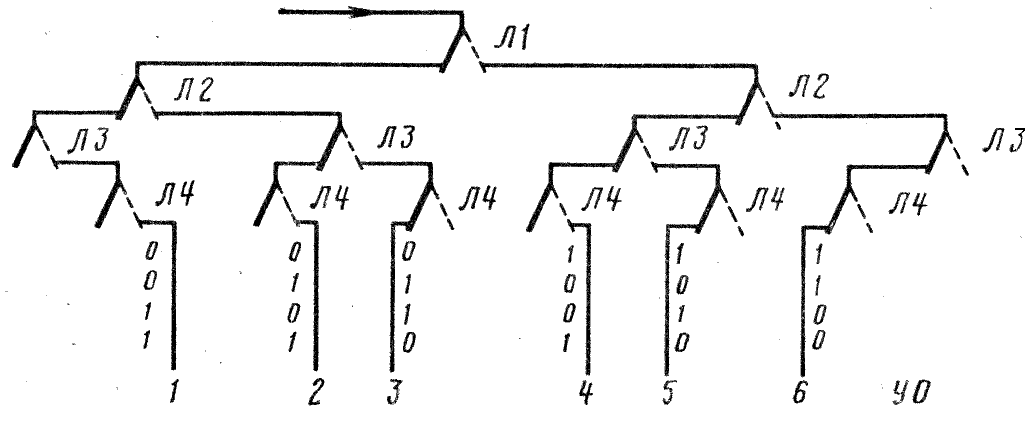 11.7.
Схема декодера равновесного кода
11.7.
Схема декодера равновесного кода


 13.4.
Структурная схема системы с кодовой
селекцией
13.4.
Структурная схема системы с кодовой
селекцией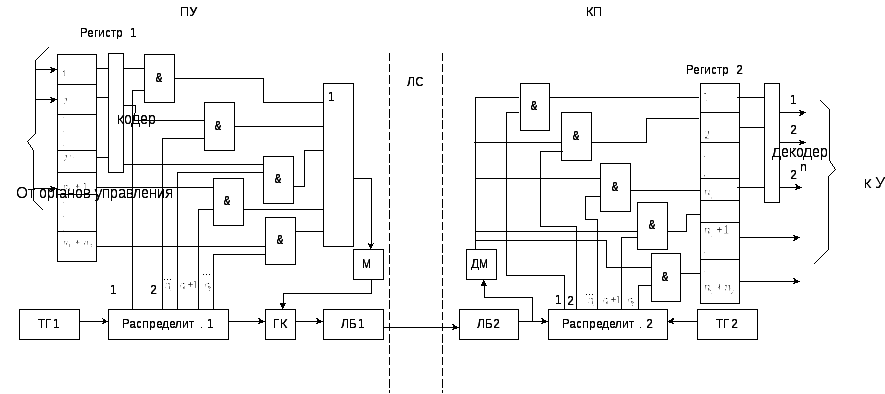 13.5.
Структурная схема системы с
кодово-распределительной селекцией
13.5.
Структурная схема системы с
кодово-распределительной селекцией Структурная
схема кодоимпульсной системы
телеизмерения:
Структурная
схема кодоимпульсной системы
телеизмерения:

