

22. Приводы с бесступенчатым регулированием скорости. Способы бесступенчатого регулирования.
В современных металлорежущих станках бесступенчатые приводы получили очень широкое распространение, благодаря следующим плюсам:
1. Возможность настройки режима обработки с очень высокой точностью.
2. Возможность изменения режимов обработки в процессе работы станка.
3. Плавность изменения скорости обработки позволяет легко выходить из области резонансных явлений.
Способы бесступенчатого регулирования.
Выбор способа в первую очередь зависит от назначения станка, требуемой мощности резания, необходимого диапазона регулирования, допустимого удорожания станка.
Различают следующие способы:
1. Электрический.
2. Гидравлический.
3. Механический.
4. Комбинированный.
Электрическое регулирование.Производят изменением частоты вращения вала эл.двигателя. К настоящему времени в станках используют системы частотного регулирования (скалярные или векторные). Благодаря им частота вращения вала эл.двигателя изменяется прямопропорционально частоте тока в сети.
Гидрорегулирование. Применение гидрорегулирования обусловлено рядом плюсов:
1. Широкий диапазон регулирования.
2. Быстрое изменение величины и направления скорости.
3. Плавный реверс.
4. Удобство дистанционного управления и автоматизация.
5. Автоматическое предохранение от перегрузок.
6. Самосмазываемость.
Минусы:
1. Отсутствие жесткости характеристики, в следствии изменение вязкости масла под воздействием температуры или в следствие утечки масла.
2. При малых скоростях (12..15м/мин.) работа гидропривода становится неустойчивой.
Регулирование с помощью вариатора. Большинство механических вариаторов, применяемых в станкостроении, относятся к фрикционному типу. Работа таких вариаторов обусловлена потерями на трение, что вызвано следующими факторами:
1. Не благоприятным кинематическим условием в зоне контакта и возникновение, в следствие этого, разности скоростей в сопрягаемых точках рабочих поверхностей.
2. Деформация рабочих поверхностей в зоне контакта.
3. При перегрузках имеет место буксования рабочих тел вариаторов.
Минусы:
1. Невозможность установки определяемой скорости при остановленном вариаторе.
2. Отсутствие жесткости кинематической характеристики.
Все способы регулирования дают ограниченный диапазон:
- электрическое – до 6-8;
- гидравлический – до 25;
- механический – до 10;
Для увеличения диапазона регулирования комбинируют с шестеренными коробками.
23. Современные коробки скоростей с бесступенчатым регулированием.
Привод подачи. Структура приводов подач. Особенности расчёта приводов подач.
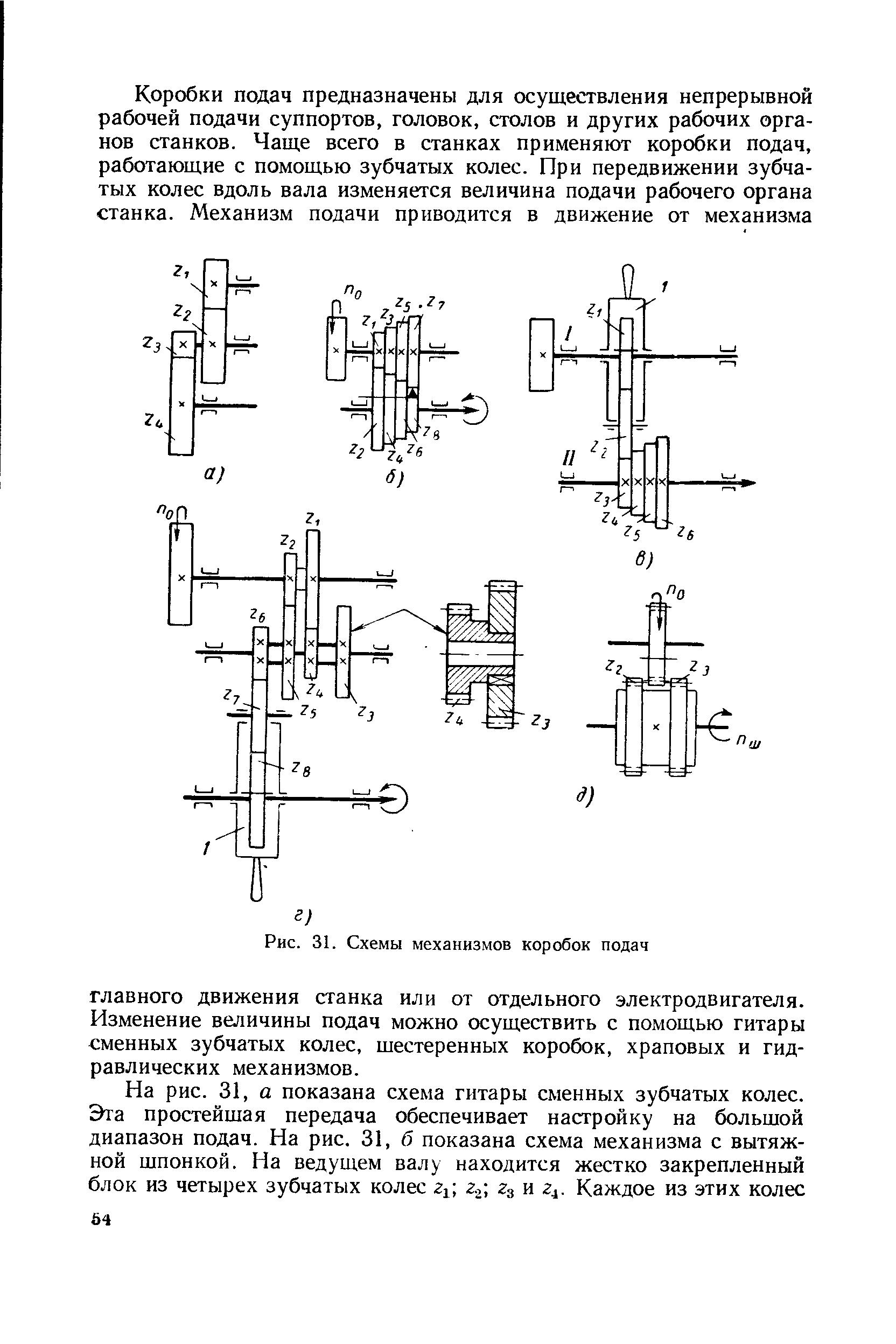
Механизм подачи включает:
Привод механизма подачи (осуществляется от отдельного электродвигателя или с вала КС)
Устройство для включения механизма подач располагается в начале цепи подач (фрикционные муфты)
Устройство для реверсирования подач
Предохранительное устройство
Одиночные передачи в цепи рабочих подач
Цепь передач для ускоренных ходов суппорта или стола
Коробка подач
Тяговое устройство
Коробка подач (КП)
КП по сравнению с КС более тихоходные, имеется большая редукция частот вращения, для некоторых типов КП необходимо осуществление в обеспечении нарезаний резьбы- требуется обеспечить постоянный крутящий момент, значение подач должно обеспечивать требуемую чистоту поверхности, высокую стойкость инструмента, требуемую производительность станка.
При необходимости обеспечения точности передаточных отношений не изпользуют передачи с гибкой связью
КП могут быть разделены на следующие типы:
КП с передвижными зубчатыми блоками
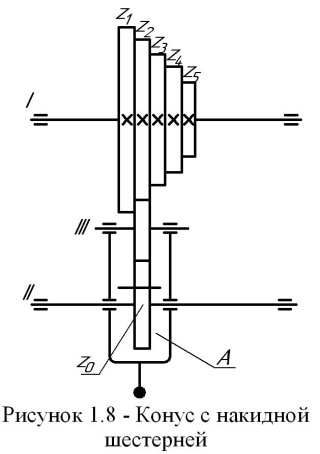
КП со ступенчатым конусом зубчатых колес
-конус с накидным зубчатым колесом
-конус с вытяжной шпонкой
Коробка типа Меандр
Со сменными зубчатыми колесами

Ряды подач
Ряды подач - исчисляются мм/об, мм/мин принято считать как ряды частот вращения по геометрической прогрессии. Это было предложено в 1937 году проф. Кашириным.
В своих исследованиях он исходил из условий наилучшего использования режущих свойств инструмента.
Привод построенный по геометрическому ряду обладает теме же преимуществами, что и КС.
Характерн тот же набор формул для привода главного движения

Выбор знаменателя геометрического ряда аналогичен выбору для КС.
В станках где подача (переодическая) , осуществляется от храпового механизма – подачи располагаются по арифметическому ряду

Шаги резьб образуют ряд близкий к арифметическому.
В связи с этим в станках для нарезания резьб изменение подач по геометрическому или арифметическому ряду происходить не может.
Поэтому цепь подач при нарезании резьбы строится в соответствии с номенклатурой резьб нарезаемых на станке, требуемые шаги резьб вписываются в определенной последовательности в таблицу и разрабатывают кинематическую схему и конструируют КП, обеспечивающую требуемую подачу.
В станках с настройкой в цепи подач с помощью сменных колес подача располагается по геометрическому ряду.