

Классы точности регуляторов.
Предусматриваются четыре класса точности регуляторов, характеризуемые допустимой статической погрешностью: 1-й - 0,25; 2-й -
0,5; 3-й - 1,0 и 4-й -1,5. Суммарная статическая погрешность регуляторов этих классов ограничена соответственно 0,25%, 0,5%, 1,0%, 1,5%, а величины зон нечувствительности, входящие в приведенные цифры, не должны превышать соответственно 0,2%, 0,4%, 0,8%, 1,2%.
Входные сигналы регуляторов.
Как правило, используется унифицированные входные сигналы: 0-5, 0-
20, 4-20мА постоянного тока и 0-10В постоянного напряжения. Однако применяются и неунифицированные сигналы как, например, ЭДС термопар, переменное напряжение 0-1В (с изменением фазы на 180° при переходе через нуль). Встречаются и другие виды входных сигналов, но перспективными следует считать унифицированные входные сигналы.
Входное сопротивление регуляторов.
Величина входного сопротивления регулятора должна быть согласована с параметрами соответствующих датчиков. Для регуляторов, работающих с низкоомными датчиками переменного напряжения (индукционными, дифференциально-трансформаторными, реостатными), входное сопротивление должно быть не менее 450 Ом. Если регулятор работает с высокоомными датчиками, например, ферродинамическими, то его входное сопротивление должно быть не ниже 30 кОм. При использовании датчиков с унифицированными сигналами постоянного тока входное сопротивление регулятора должно быть не более 500 Ом.
Вопросы для самопроверки:
объясните работу релейного регулятора по характеристике Uвых = f(Uвх);
охарактеризуйте режимы работы релейного регулятора;
запишите неравенство, определяющее скользящий режим работы релейного регулятора;
в чем заключается и что дает линеаризация релейного регулятора;
какая существует зависимость между параметрами регулятора и электрического исполнительного однооборотного механизма.
Раздел 3
Тема 1. Агрегатированный комплекс электрических средств регулирования.
Общие сведения о комплексе АКЭСР-2. Состав комплекса, регулирующие, функциональные (статические и динамические) и вспомогательные блоки. Назначение, конструкция, область применения, подготовка к работе.
АКЭСР-2 разработан ВТИ им.Дзержинского (Москва) и СКБ CПA (Чебоксары). Состав и взаимодействие аппаратуры комплекта показаны на
рис.4.2. Все приборы и устройства условно разделены на пять групп: 1 - регулирующие, 2 - функциональные динамические, 3- функциональные статические, 4- вспомогательные и 5- исполнительные.
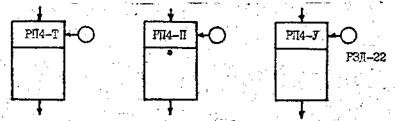
В группу 1 входят регулирующие блоки РП4, которые предусматривают три исполнения, различающиеся видами принимаемых входных сигналов. Блок основного назначения (РД4-У) рассчитан на прием до четырех унифицированных сигналов постоянного тока 0-5 мА и применяется во всех случаях, когда схема регулирования требует дополнительного использования других функциональных блоков. Блоком осуществляется алгебраическое суммирование, масштабирование и гальваническое разделение до четырех входных унифицированных сигналов, демпфирование их суммы, а также пропорционально-дифференциальное (ОД) ее преобразование в последовательность выходных командных импульсов. Блоки PП4-У совместно с исполнительными механизмами постоянной скорости (осуществляющими функцию интегрирования) образуют регулятор, формирующий Ш-закон регулирования. В блоках РП4-У предусмотрен автономный узел задатчика с унифицированным выходным сигналом 0-5 мА, который может быть включен в схему регулятора внешними перемычками.
Для решения простейших задач в составе комплекта предусмотрены также модификации регулирующего блока, рассчитанные на непосредственное подключение термопар или термометров сопротивления (РП4-Т), а также дифференциально-трансформаторных, индуктивных или ферродинамических датчиков переменного тока (PП4-П). Функциональная структура всех модификаций одинакова и различаются они лишь узлами приема и суммирования входных сигналов.
Блоки PП4 (всех модификаций) оснащены также узлом дистанционного изменения (автоподстройки) динамических параметров: постоянной времени интегрирования и коэффициента передачи П .
Регулирующий блок РП4.
Упрощенная
блок-схема
регулирующего
блока
РП4-У
приведена
на
рис.4.3.
Регулируемые
параметры
и
задание
поступают
на
входы
сумматора
1,
в
котором
происходят
их
алгебраическое
суммирование
и
формируется
сигнал
рассогласования
![]()
Последний через масштабирующее устройство подается на демпфер 2,
1. Блоки регулирующие
АКЭСР-2
2. Блоки функциональные 3. Блоки функциональные динамические статические
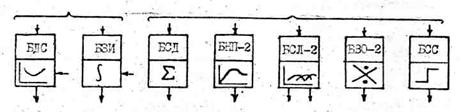
4. Блоки вспомогательные
5. Исполнительные устройства
Pис.4.2

Рис.4.3
представляющий
собой
интегрирующее
звено
с
постоянной
времени
Тф.
С
выхода
демпфера
сигнал
рассогласования
поступает
на
вход
операционного
усилителя - сумматора 3, выход которого соединен со входом
трехпозиционного нуль-органа 4, имеющего регулируемую зону
нечувствительности
![]() Н.
Н.
При сигнале рассогласования, превышающем порог срабатывания регулирующего устройства РП4, нуль-орган срабатывает и скачком подает сигнал в цепь отрицательной обратной связи 5, представляющей активное инерционное RC-звено и одновременно на выходные ключи 6, коммутирующие цепи внешней нагрузки. При срабатывании ключа соответствующей полярности на выходе его появится напряжение.
При срабатывании нуль-органа сигнал на выходе звена 5 отрицательной обратной связи начинает плавно увеличиваться и компенсировать сигнал рассогласования на входе операционного усилителя-
сумматора 3. Сигнал на входе нуль-органа плавно уменьшается до порога отпускания, после чего нуль-орган отключается, сигналы на выходе устройства и на входе цепи 00С исчезают. Сигнал на выходе цепи отрицательной обратной связи начинает плавно уменьшаться, а сигнал на входе нуль-органа возрастает до порога его срабатывания. Далее цикл повторяется.
Таким образом, регулирующее устройство РП4 формирует на своем выходе импульсы, чередующиеся паузами. Интегрирование этих импульсов при помощи исполнительного механизма постоянной скорости позволяет получить ПИ-закон регулирования.