

Тема 4. Релейные регуляторы.
Основной признак релейного регулятора. Структурная схема и принцип работы по структурной схеме. Режимы работы релейного регулятора. Линеаризация релейного регулятора. Зависимости между параметрами регулятора и электрического исполнительного однооборотного механизма МЭО.
Релейные регуляторы - наиболее распространенный вид промышленных регуляторов. Они просты по схеме и конструкции, экономичны, надежны. Работают в комплекте с электрическими исполнительными механизмами постоянной скорости, которые также являются наиболее простым, надежным и экономичным видом исполнительных устройств.
Признаком релейного регулятора является наличие характерной для него трехпозиционной с гистерезисом нелинейности (рис.2.15), характеризующейся зоной нечувствительности Н и зоной возврата b
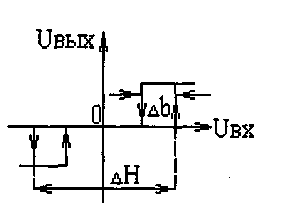
Рис. 2.15. Нелинейность «Трехпозиционное реле с положительным гистерезисом».
У разных типов регуляторов она реализуется по-разному. Это может быть обычное электромагнитное реле или триггерные устройства, выполненные на магнитных усилителях, транзисторах или интегральных микросхемах. Рассмотрим упрощенную схему релейного регулятора и проанализируем особенности его работы (рис.2.16),
где 1 - нелинейный усилитель;
2 - исполнительный механизм постоянной скорости;
3 - цепь отрицательной обратной связи;
4 - входной сумматор.
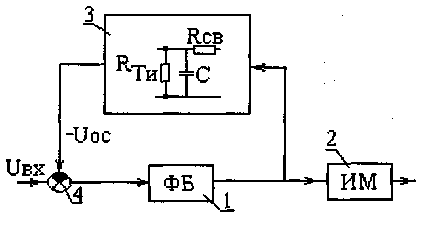
Рис. 2.16. Упрощенная схема релейного регулятора.
Режимы работы релейного регулятора
При входном напряжении, меньшим половины зоны нечувствительности на выходе усилителя 2 сигнал отсутствует. Исполнительный механизм неподвижен, напряжение на выходе цепи
отрицательной обратной связи -Uос= 0.
При
U срабатывает релейный элемент и на выходе усилителя
вх 2
1 появится напряжение, которое приведет в движение исполнительный механизм 2, одновременно начнется заряд конденсатора С цепи обратной связи через резистор Rсв- Напряжение -Uос с выхода ЦООС (цепи отрицательной обратной связи) в сумме с входным напряжением стремится
его компенсировать и при:
U вх
U ос 2 b
реле отпускается. Напряжение на выходе усилителя 1 исчезнет,
исполнительный механизм останавливается, заряд конденсатора С
u
RT Rсв
Рассмотрим процессы в релейном регуляторе при характерных для его работы режимах.
Пусть скорость Vсв изменения напряжения на выходе цепи обратной связи характеризуется углом α (рис.2.17,а).
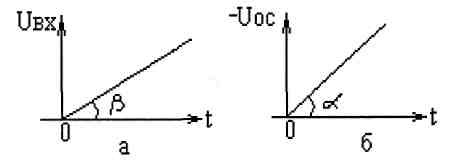
Рис. 2.17. Графики изменения скорости напряжения на выходе (а) и изменения регулируемой величины (б).
Предположим, что регулируемая величина, т.е. входной сигнал изменяете: со скоростью выражаемой углом β (рис.2.17,6). В зависимости от соотношения углов α и β имеют место два режима работы регулятора:
1. β < α скорость изменения регулируемой величины больше, чем
скорость изменения напряжения обратной связи.
Когда отклонение регулируемой величины станет равно ,
2
включится исполнительный механизм. Срабатывание реле вызове появление линейно нарастающего напряжения обратной связи. Если скорость изменения регулируемой величины будет все время больше скорости изменения напряжения обратной связи, то исполнительный механизм, оставаясь все время включенным, будет перемещать регулирующий орган с постоянной скоростью. Такой режим работы регулятора называется режимом постоянной скорости.
2. β < α, т.е. скорость изменения поступающей на вход регулятора регулируемой величины меньше скорости изменения напряжения
обратной связи. Рассмотрим процессы, которые будут протекать в регуляторе в этом случае. Пусть в момент времени t0 (рис.2.18) на вход регулятора начал поступать входной сигнал Uвх нарастающий со скоростью, определяемой углом β. В момент времени t1 отклонение Uвх достигнет половины зоны нечувствительности регулятора, что повлечет включение исполнительного механизма.

Рис.2.18. Скользящий режим работы релейного регулятора. Одновременно начнет увеличиваться напряжение Uос обратной связи (с
противоположным знаком). Скорость нарастания Uос больше, чем скорость регулируемой величины. Следовательно, разность Uвх - Uос будет
уменьшаться. В момент времени t2, когда эта разность станет равной b ,
2
исполнительный механизм включится. Начнется разряд конденсатора ЦООС
через резистор R Ти . Но процесс увеличения регулируемой величины продолжается и в момент t3 произойдет новое включение исполнительного механизма. Включение и выключение механизма будут периодически следовать друг за другом. Если сравнить характеры движения механизма в двух рассмотренных случаях, то нетрудно увидеть их существенное различие. В первом случае режим исполнительного механизма характеризуется длительным включением. Характерной
особенностью режима во втором случае являются частые кратковременные включения в одном направлении при плавном изменении регулируемой величины. Такой характер работы регулятора получил название скользящего (или пульсирующего) режима.
При скользящем режиме работы средняя скорость движения исполнительного механизма всегда меньше его конструктивной скорости, определяемой скоростью электродвигателя и передаточным отношением редуктора. Специфичным для скользящего режима является особый характер изменения воздействия обратной связи. В скользящем режиме изменение Uос как бы следит за изменением регулируемой величины Uвх, отличаясь от нее по своему среднему значению на небольшую величину. Разность Uвх – Uос
при скользящем режиме лежит в пределах:
U вх
2
U ос b
2
Чем меньше зона нечувствительности Н регулятора, тем меньше отличается текущее значение отклонения регулируемой величины от значения сигнала обратной связи.
Кроме рассмотренных режимов возможен также смешанный режим, при котором имеет место как длительные, так и кратковременные включения исполнительного механизма.
Скользящий режим является основным режимом работы промышленных релейных регуляторов технологических процессов. Таким образом, условие наличия скользящего режима можно сформулировать так: скорость изменения регулируемой величины должна быть меньше скорости изменения сигнала обратной связи, компенсирующего входной сигнал регулятора.
В скользящем режиме, когда имеет место неравенство (3.25), (с точностью до половины зоны нечувствительности) выполняется условие:
U вх U ос
т.е. регулятор, содержащий нелинейные элементы (реле, исполнительный механизм постоянной скорости) начинает подчиняться нелинейному закону регулирования, определенному устройству обратной связи. Это является чрезвычайно важным выводом, т.к. на этом основании при расчете систем автоматического регулирования, использующих регуляторы данного типа, становится возможным пользоваться линейной теорией автоматического регулирования.
В самом деле, пусть регулятор состоит из усилителя, содержащего нелинейные элементы и охваченного обратной связью (рис.2.19).

Рис.2.19. Схема регулятора.
На вход регулятора поступает сигнал Uвх и напряжение обратной связи Uос. Передаточная функция цепи обратной связи определяется как отношение:

Отсюда
Передаточная функция регулятора в целом имеет вид:
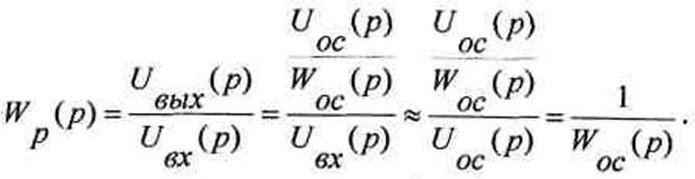
Поскольку в скользящем режиме
регулятора
![]() ,
то
передаточная функция
будет:
,
то
передаточная функция
будет:
![]()
Таким образом, постановка регулятора в скользящий режим является важным способом линеаризации релейного регулятора. Действительно, ЦООС составлена из линейных элементов, поэтому и будет линейной.
Зависимости между параметрами регулятора, регулирующего блока и исполнительного механизма.
Как уже отмечалось, в реальных АСР соответствие между динамическими характеристиками объекта и регулятора, необходимое для получения в системе оптимального качества регулирования, достигается установкой рассчитанных настроек регулятора. В результате расчета настроек, который будет рассмотрен ниже, находятся значения динамических параметров регулятора. Для ПИ-регулятора это будут kp - коэффициент усиления и Тu - время интегрирования регулятора. Однако реализация этих параметров производится путем установки параметров отдельных блоков, входящих в состав регулятора, для этого необходимо знать взаимосвязи между параметрами настройки регулятора и параметрами настройки входящих в него блоков.
Предположим, что релейный ПИ-регулятор находится в скользящем режиме работы. Подадим на его вход скачкообразное возмущение и рассмотрим временные диаграммы, характеризующие процессы в регуляторе (рис.2.20). После нанесения возмущения (рис.2.20,а) регулятор некоторое время будет работать в режиме постоянной скорости (интервал времени от 0 до t1). При этом на выходе формирующего блока (рис.2.20,б) будет положительный импульс напряжения Uвых длительностью tПР, определяющий пропорциональную часть выходного сигнала регулятора. Выходной вал (или шток) исполнительного механизма переместится за это время на величину Δ хвых (рис.2.20,в).
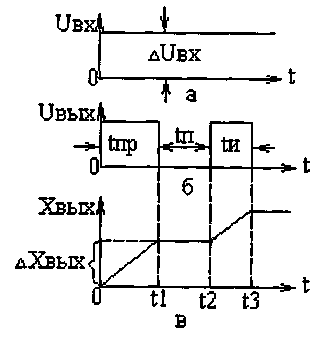
Рис. 2.20. Диаграммы процессов в регуляторе: а- после нанесения возмущения; б- импульс напряжения
на выходе ФБ; в- реакцияИП.
Как только напряжение отрицательной обратной связи формирующего блока скомпенсирует входной сигнал, импульс пропорциональной части прекратится и регулятор перейдет в скользящий режим. На выходе формирующего блока появится последовательность коротких импульсов, длительностью tu, следующих через интервал времени tП (рис.2.20,6). Эти импульсы называются интегральными. Они характеризуют интегральную часть выходного сигнала регулятора. Выходной вал исполнительного механизма при каждом импульсе будет перемещаться на некоторую величину, а в промежутке времени между импульсами выходной вал механизма остается неподвижным, т.е. "запоминает" достигнутое им положение.
Рассмотрим графики (рис.2.20), показывающие процессы в релейном регуляторе. Здесь tПР - длительность импульса пропорциональной части, tu - длительность импульсов интегральной части, tП - длительность паузы. Следовательно:
![]()
где Δ Uвх - амплитуда скачкообразного возмущения, или в относительных единицах:

где хвых - полный ход ИМ, град;
Uвх - номинальное значение входного сигнала, мВ.
Для исполнительных механизмов постоянной скорости очевидна пропорция:

где Тим- время полного хода исполнительного механизма. Следовательно:
Но
![]()
мВ
где Vсв - скорость изменения напряжения обратной связи с
1
Vсв.отн. - то же, в относительных единицах с
Поэтому:
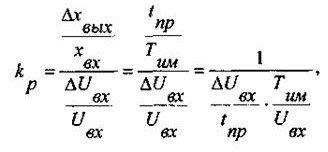
![]()
Мы получили очень важную формулу, связывающую коэффициент усиления релейного регулятора и скорость связи - параметр настройки формирующего блока.
Из полученной формулы следует, что требуемый параметр kp
настройки регулятора может быть реализован не только установкой значения
![]()
Требования, предъявляемые к электрическим автоматическим регуляторам.
Многолетний опыт разработки, производства и эксплуатации автоматических регуляторов в нашей стране, накопленный промышленностью, исследовательскими и конструкторскими организациями, позволил создать единые требования (ГОСТы), предъявляемые к электрическим автоматическим регуляторам. В частности, существует ГОСТ №7191-69 на электрические автоматические регуляторы, в котором эти требования сформулированы. Рассмотрим основные из них.
Рекомендуемые диапазоны изменения динамических параметров регуляторов приведены в табл.2.1.
Таблица 2.1. Рекомендуемые диапазоны изменения ДП регуляторов.
Динамические параметры регуляторов |
Диапазон изменений динамических параметров регуляторов |
||
|
П |
ПИ |
ПИД |
Коэффициент
усиления k p [-] |
0,3-10
2,5-50 |
0,3-10
2,5-10 |
0,3-10
2,5-10 |
Постоянная
времени
интегрированная Т и |
-
- |
5-500
20-2000 |
5-500
20-2000 |
[с] |
|
|
|
Постоянная
времени дифференцированная
Т о [с] |
-
- |
-
- |
0-100
0-100 |
Значение коэффициента усиления приведены в этой таблице в
относительных величинах. Для вычисления его в формуле:
![]()
Числитель хвых.отн и знаменатель хвх.отн надо представить также в относительных единицах. Для этого необходимо измеренные и рассчитанные значения хвых и хвх величин поделить на базовые значения этих величин, т.е. номинальные или максимальные их значения. Тогда формула примет вид:
