

Тема 2. Типовые законы регулирования.
Определение закона регулирования, краткая характеристика унифицированных законов регулирования: пропорциональный, интегральный, пропорционально-интегральный, пропорционально- интегрально-дифференциальный. Сравнительный анализ переходного процесса для разных законов регулирования. Критерии выбора закона регулирования.
Для того чтобы, система автоматического регулирования была устойчивой и обеспечивала необходимое качество регулирования, регулятор должен обладать определенными динамическими характеристиками, которые могут быть описаны дифференциальными уравнениями, связывающими выходную и входную величины. Эти зависимости носят название законов регулирования, или алгоритмов регулирования. Для выполнения требуемых законов регулирования автоматические регуляторы должны содержать так называемые корректирующие устройства, с помощью которых можно изменять в нужном направлении (корректировать) их динамические характеристики.
Требуемые динамические характеристики регуляторов определяются динамическими характеристиками объектов регулирования.
Каждая практическая задача, различающаяся либо объектом регулирования, либо требованиями к качеству регулирования, точности и т.д., требует своего подхода, своего наиболее целесообразного для этого случая закона регулирования. Если пойти по этому пути, то для каждой системы автоматического регулирования пришлось бы разрабатывать свой
уникальный регулятор. Организовать промышленное производство таких регуляторов было бы невозможно.
Для того чтобы серийное производство регуляторов стало реальным, все многообразие известных законов регулирования было сгруппировано по сходным признакам. Унификация законов регулирования позволило осуществить унификацию конструкций регуляторов. Регуляторы каждой группы имеют теперь одни и те же конструктивные элементы и отличаются только положением органов их настройки.
Длительный опыт автоматизации ведущих отраслей промышленности (энергетика, металлургия и др.) убедительно показал, что подавляющее большинство задач по автоматическому регулированию могут быть решены регуляторами со следующими четырьмя линейными унифицированными законами регулирования: пропорциональным, интегральным, пропорционально-интегральным и пропорционально-интегрально- дифференциальным. Эти регуляторы называются соответственно: П- регуляторы, И-регуляторы, ПИ-регуляторы и ПИД-регуляторы. Рассмотрим основные характеристики этих регуляторов (ниже рассматриваются идеальные регуляторы).
П — регуляторы.
Пропорциональные, или П-регуляторы производят перемещение регулирующего органа пропорционально отклонению регулируемой
величины от заданного значения:
xвых
k p xвх
(2.1)
Коэффициент kp называется коэффициентом усиления регулятора
и имеет размерность:
Единица
регулирующего воздействия
xвых
Единица
регулируемой величины
хвх
(2.2)
П-регулятор в динамическом отношении подобен безынерционному звену, передаточная функция, амплитудно-фазовая и временная
характеристики которого определяются формулами:
W p p k p W p j k p h p t k p
(2.3)
Для определения амплитудно-фазовой характеристики регулятора на
вход его подается возмущение синусоидальной формы
xвх
xвх.m sin t
(2.4)
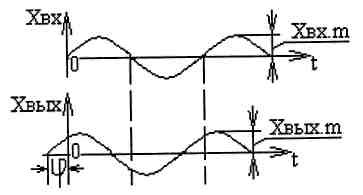
Рис.2.4. Входные/выходные сигналы П-регулятора.
Выходной сигнал регулятора также будет иметь синусоидальную
форму
xвх
xвх.m sin t
, однако амплитуда и фаза выходного
сигнала в общем случае будут зависеть от частоты. Для П-регулятора, в соответствии с формулами (2.3), амплитуда выходного сигнала не зависит от
частоты и будет:
xвых .m
k p xвх .m
, (2.4)
а фазы входного и выходного сигналов совпадут.
В графической форме амплитудно-фазовая характеристика П- регулятора представляет собой отрезок прямой длины (kp), отложенный по оси абсцисс комплексной плоскости вправо от начала координат (рис.2.5).
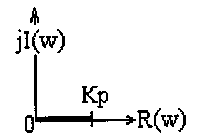
Рис.2.5. АФХ П-регулятора.
Временная характеристика h(t) или характеристика разгона представляет собой реакцию регулятора на скачкообразное возмущение (рис.2.6).
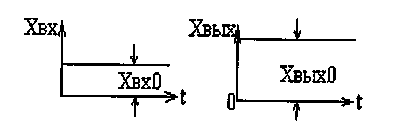
Рис.2.6. Временная характеристика П-регулятора на скачкообразное возмущение.
Коэффициент усиления регулятора kp является единственным динамическим параметром настройки П-регулятора, т.е. параметром, изменением которого осуществляется настройка регулятора в системе автоматического регулирования по тому или иному критерию на наилучшее качество регулирования. Пропорциональные регуляторы позволяют устойчиво регулировать работу большинства промышленных регулируемых объектов. Однако они обладают тем недостатком, что при различных нагрузках регулируемого объекта регулируемая величина удерживается регулятором на различных значениях. Объясняется это тем, что перемещение регулирующего органа в новое положение, соответствующее новой нагрузке, может быть произведено только за счет отклонения регулируемой величины. Это получило название остаточной неравномерности регулирования или
статизма:
1
k
p (2.5)
И – регуляторы.
Интегральные регуляторы, или И-регуляторы, перемещают регулирующий орган пропорционально интегралу от отклонения
регулируемой величины:
xвых
p xвхdt
 1
1
xвхdt
T
(2.6)
Этот закон может быть также записан в следующем виде:
dxвых x
dt p вх
(2.7)
т.е. интегральные регуляторы перемещают регулирующий орган со скоростью, пропорциональной отклонению регулируемой величины от ее заданного значения. Иногда интегральные регуляторы называют астатическими, т.к. в системе регулирования с этими регуляторами отсутствует статическая ошибка. Это определение менее точно в виду того, что и некоторые другие типы регуляторов (как видно будет из дальнейших рассуждений) обеспечивают в системах регулирования отсутствие статической ошибки.
Интегральные регуляторы так же, как и пропорциональные, имеют один параметр динамической настройки:
1
p T
и (2.8)
Коэффициент p носит название приведенной скорости регулирования
или скорости разгона и имеет размерность:
Единица
регулирующего воздействия
Единица времени
единица
регулируемой величины
(2.9)
В динамическом отношении И-регулятор подобен интегрирующему звену. Его передаточная функция и амплитудно-фазовая характеристика
определяются формулами:
(2.10)
p
2
W p j = Pe
На комплексной плоскости амплитудно-фазовая характеристика изображается в виде прямой, совпадающей с отрицательной частью мнимой оси (рис.2.7). Величина угла сдвига фаз интегрального регулятора составляет
-90 .

Рис. 2.7. АФХ И-регулятора.
Для получения выражения для временной характеристики найдем предварительно изображение регулирующего воздействия при
скачкообразном возмущении:
хвых р
хвх
р W p p
хвх.0 р
р 2
(2.11)
хвх р
хвх.0
р
(2.12)
т.к
Оригинал этого изображения даст временную характеристику:
hp t
1
L 1 хвх.о р
р 2
хвх.о р t
(2.13)
Если на вход регулятора подается единичное (хвх.0=1)
скачкообразное возмущение, то временная характеристика И-регулятора запишется так:
hp t
p t (2.14)
Построим временную характеристику, совместив на одном графике xвх
(t) и xвых (t). Тогда время интегрирования Ти И-регулятора, являющееся
обратной величиной приведенной скорости регулирования p , можно определить как время, в течение которого изменение регулирующего воздействия достигнет величины, равной входному скачкообразному возмущению (рис.2.8).
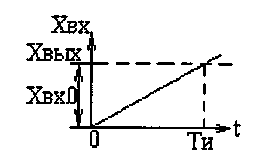
Рис. 2.8 Временная характеристика И-регулятора
ПИ - регуляторы
Пропорционально-интегральным, или ПИ-регулятором, называют пропорциональный регулятор с введение в закон регулирования интеграла. ПИ-регулятор производит перемещение регулирующего органа пропорционально отклонению и интегралу от отклонения регулируемой величины.
Уравнение идеального ПИ-регулятора:
хвых
k p xвх
1
хвх dt
Т и
(2.15)
Эта формула может быть представлена также в другом виде:
dxвых
dt
Т
1
хвх
и
(2.16)
т.е. скорость перемещения регулирующего органа пропорциональна отклонению и скорости
изменения регулируемой величины.
ПИ-регуляторы имеют два регулируемых динамических параметра, которые используются в качестве настроечных параметров:
• kp - коэффициент усиления регулятора;
• Ти - постоянная времени интегрирования величина, которой характеризует степень ввода и закон регулирования интеграла. Этот параметр называют иногда временем "изодрома" или временем "удвоения", т.к. Ти обычно определяют как время в течение которого выходная координата xвых регулятора при скачкообразном возмущении достигает своего удвоенного значения (рис.2.8).
В динамическом отношении ПИ-регулятор подобен двум включенным параллельно звеньям:
k p p T
и (2.17)
При беспредельном увеличении времени интегрирования Ти, ПИ- регулятор превращается в пропорциональный. Если устремить kp и Ти к нулю,
но так чтобы их отношение p оставалось постоянным, то получим интегральный регулятор.
Передаточную функцию и амплитудно-фазовую характеристику
идеального ПИ-регулятора легко получить из уравнения (2.15)
k
p
1 pTи
pTи
W p j
1
k p 1 j
Tи
(2.18)
На комплексной плоскости амплитудно-фазовую характеристику ПИ- регулятора можно изобразить в виде прямой, идущей из бесконечности параллельно мнимой оси (рис.2.9) на расстоянии – kp от нее и заканчивающейся на оси абсцисс.
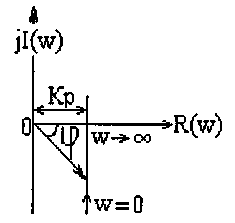
Рис. 2.9. АФХ ПИ-регулятора.
ПИ-регулятор занимает промежуточное положение между пропорциональным и интегральным регуляторами. В зависимости от соотношения пропорциональной и интегральной составляющей фазовый угол может изменяться в пределах от 0 до -90°.
Уравнение временной характеристики можно получить с помощью обратного преобразования Лапласа, используя формулу (2.18) для передаточной функции:
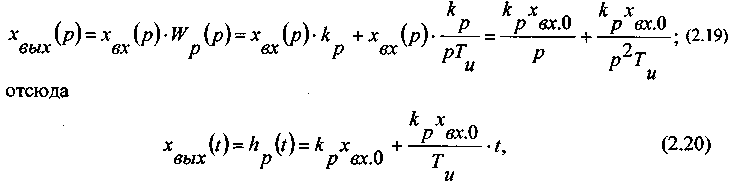
где хвх.0 - скачкообразное возмущение.
Построенная по этому уравнению временная характеристика ПИ- регулятора проведена на рис.2.10.

Рис.2.10. Временная характеристика ПИ-регулятора.
Она состоит из двух частей. Отрезок хвых.0 характеризует "пропорциональную часть", т.е. изменение регулирующего воздействия в соответствии с первым слагаемым уравнения (2.20). Отрезок аb представляет собой "интегральную часть", которая определяется вторым слагаемым уравнения. Постоянная времени интегрирования Ти (рис.2.10) есть время, в течение которого регулирующее воздействие возрастает на величину равную пропорциональной части. К этому выводу нетрудно прийти, не прибегая к геометрическим построениям. Достаточно в уравнении (2.20) положить t =
Ти, тогда:
h p t
2 xвых .0
2k p xвх .0
(2.21)
ПИД-регуляторы.
Пропорционально-интегрально-дифференциальным, или ПИД- регулятором, называется регулятор, производящий перемещение регулирующего органа пропорционально отклонению, интегралу от отклонения и скорости изменения регулируемой величины, т.е. ПИД- регулятор вводит в закон регулирования интеграл и производную от регулируемой величины.
Идеальный ПИД-регулятор описывается следующим уравнением:
хвых
k p хвх
1
хвх dt
Т и
T dxвх
0 dt
(2.22)
где Т0 - постоянная времени дифференцирования или, как ее иногда называют, время предварения.
ПИД-регуляторы имеют три регулируемых динамических параметра, которые используются в качестве настроечных параметров:
• коэффициент усиления kp;
• время интегрирования Ти;
• время дифференцирования ил время предварения Т0
Применив к уравнению (2.22) преобразование Лапласа, можно найти передаточную функцию ПИД-регулятора, а также его амплитудно- фазовую характеристику (рис. 2.11).
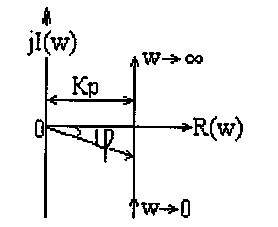
Рис. 2.11. АФХ ПИД-регулятора.
1 pT
p 2T T
p
k u u 0
pTu
k p
W p j
k p j
k p T0
Tu
(2.23)
Графически амплитудно-фазовая характеристика ПИД- регулятора изображается в виде прямой, параллельной мнимой оси комплексной плоскости, и расположенной на расстоянии kp от нее. При >0,
прямая уходит в - , а при >0, в + . Фазовый угол ПИД-регулятора может
изменяться в пределах от +90° до -90 . Получим уравнение временной
характеристики:
отсюда
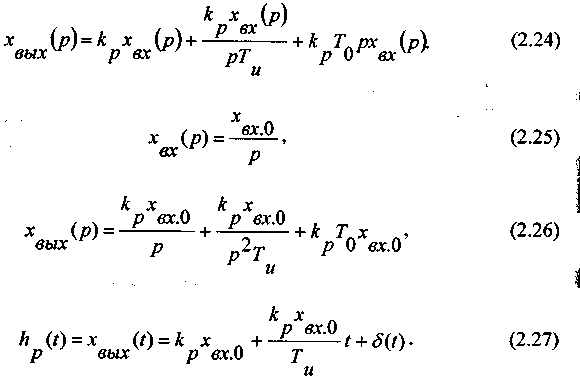
Уравнение временной характеристики идеального ПИД-регулятора состоит из двух частей:
h p t
при t 0
k p xвх.0 , 0
hp t
k p xвх.0
t при t
Tи
(2.28)
Действительно, в момент действия на вход регулятора скачкообразного сигнала последний член уравнения (2.22) стремится к бесконечности. При t >
0, когда входной сигнал сохраняет неизменное значение, член, содержащий производную от отклонения (входного сигнала), равен нулю, и переходная функция становится аналогичной переходной функции ПИ-регулятора.
Временная характеристика идеального ПИД-регулятора изображена на рис.2.12. Пунктиром показана характеристика у реального регулятора.

Рис. 2.12. Временная характеристика ПИД-регулятора.
Сравнительная характеристика регуляторов.
Для того чтобы сравнить эффективность действия различных регуляторов, рассмотрим переходные процессы в некоторой системе автоматического регулирования при скачкообразном возмущении (рис.2.13).

Рис. 2.13. Переходные процессы регуляторов:
1-без регулятора; 2-И-регулятор; З-П-регулятор;
4-ПИ-регулятор; 5-ПИД-регулятор.
Как уже было сказано, П-регуляторы, обеспечивая устойчивость и достаточно хорошее качество регулирования, дают статическую ошибку, наличие которой является принципиальной особенностью П-регулятора.
Интегральные регуляторы не имеют этого недостатка, однако качество регулирования в системах, использующих И-регулятор, значительно уступает другим типам регуляторов. Кроме того, И-регуляторы могут устойчиво регулировать работу только объектов, обладающих самовыравниванием. Это объясняет их сравнительно небольшое применение в практике регулирования.
Наиболее широкое распространение получили ПИ-регуляторы, которые сочетают в себе достоинства как пропорциональных, так и интегральных регуляторов. Они обеспечивают хорошее качество регулирования широкого класса объектов и не дают при этом статической ошибки.
ПИД-регулятор позволяет форсировать начальную часть процесса регулирования за счет введения в закон регулирования производной от отклонения регулируемой величины. Использование ПИД-регуляторов
на объектах с малым отношением Т (величины запаздывания объекта и Т постоянной времени объекта Т ) может дать ощутимое улучшение качества регулирования. Однако система с таким регулятором требует весьма точного расчета настроечных параметров, что возможно только на объектах со строго стабильными динамическими характеристиками. В большинстве случаев это не наблюдается, что существенно ограничивает возможности ПИД- регуляторов.
В отдельных случаях бывает целесообразно применить регуляторы с пропорционально-дифференциальным (ПД) законом регулирования. Однако промышленность такие регуляторы не выпускает поскольку они легко могут быть получены из ПИД-регуляторов, если сделать Ти .
Вопросы для самопроверки:
охарактеризуйте пропорциональный закон регулирования;
охарактеризуйте интегральный закон регулирования;
охарактеризуйте пропорционально-интегральный закон регулирования; охарактеризуйте пропорционально-интегрально-дифференциальный закон регулирования;
с какими объектами можно применять интегральный регулятор;
что такое статизм?
какой закон регулирования наиболее часто применяется?