

Раздел2
Тема 1. Регулятор и его место в системе регулирования.
Определение автоматического регулятора, классификация автоматических регуляторов, анализ функциональных узлов автоматического регулятора по структурной схеме САР, принцип работы автоматического регулятора, аппаратный и приборный принципы построения структуры автоматического регулятора.
Структурную схему автоматической системы регулирования (АСР) в самом общем виде можно представить (рис.2.1) в виде замкнутого контура, состоящего из объекта регулирования и регулятора.

Рис. 2.1. Структурная схема САР.
При более детальном рассмотрении, в структурной схеме можно дополнительно выделить следующие элементы:
• датчик (Д) - прибор, осуществляющий непрерывное измерение регулируемой величины;
• элемент сравнения (ЭС) - устройство, вырабатывающее путем сравнения заданного хзд и измеренного х значений регулируемой величины сигнал ошибки или рассогласования;
• регулирующий орган (РО), назначение которого - изменять приток энергии, энергоносителя или вещества к объекту регулирования.
Эти устройства показаны на функциональной схеме (рис.2.2).
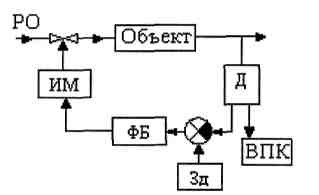
Рис. 2.2. Функциональная схема САР.
Где же проходит граница между объектом и регулятором? Какие из этих приборов и устройств целесообразно отнести к объекту, какие к регулятору? В большинстве случаев мы не можем измерить регулируемую величину, не прибегая к измерительному прибору - датчику. Вернемся к функциональной схеме замкнутой системы. О регулируемой величине мы можем судить, измеряя выходную величину (обычно, электрическую) датчика, которая находится в определенной зависимости от регулируемой величины. Например, о величине температуры печи мы узнаем, измеряя ЭДС термопары. Территориально датчик, как правило, находится ближе к объекту, чем к регулятору, под которым мы до дальнейших разъяснений будем подразумевать формирующий блок (ФБ). Так, датчики давления, расхода и ряда других величин связаны с объектом "импульсными трубками" и должны находиться вблизи объекта, тогда как с регулятором они соединены "электрически" и могут быть удалены от него на значительное расстояние. Такие датчики, как термопары, термометры сопротивления обычно встраиваются в объект и неотделимы от него.
Регулирующий орган (РО) осуществляет непосредственное воздействие на ход технологического процесса, протекающего в регулируемом объекте, и конструктивно чаще всего составляет одно целое с объектом. С учетом изложенного, датчик и регулирующий орган целесообразно считать входящими в объект регулирования.
Элемент сравнения (ЭС) принимает информацию одного или нескольких датчиков, сравнивает их с заданным значением регулируемой величины и вырабатывает сигнал ошибки или рассогласования, который
является входным сигналом формирующего блока. Однако поскольку элемент сравнения и усилитель конструктивно связаны, то, говоря о них, как о конструкции, обычно считают элемент сравнения частью регулятора.
Исполнительный механизм (ИМ), хотя и сочленен с регулирующим органом механически и территориально находится вблизи регулирующего органа, к объекту причислить нельзя, т.к. структурно он относится к регулятору, т.е. регулятор формирует требуемый закон регулирования совместно с исполнительным механизмом. Поэтому его следует рассматривать как один из элементов регулятора.
Таким образом, автоматическим регулятором следует называть комплекс устройств, воспринимающий и суммирующий информацию от датчиков и задатчика, формирующий заданный закон регулирования и оказывающий воздействие на объект регулирования, обеспечивающее необходимое качество регулирования.
Из этого определения следует, что входом регулятора надо считать вход элемента сравнения, а выходом выходной орган (вал или шток) исполнительного механизма.
Классификация регуляторов.
По виду и способу использования энергии для регулирования регуляторы делятся на регуляторы прямого и непрямого действия.
Регуляторы прямого действия управляют регулирующим органом с помощью энергии, получаемой от регулируемой среды. Обычно это регуляторы простейшего типа. Примером может служить широко известный центробежный регулятор скорости вращения. Регуляторы непрямого действия управляют регулирующим органом за счет энергии, получаемой от постороннего источника.
Регуляторы непрямого действия по виду потребляемой энергии подразделяются на электрические, пневматические, гидравлические и комбинированные.
По виду задающей программы регуляторы подразделяются на регуляторы постоянного параметра, которые поддерживают регулируемую величину на заданном постоянном уровне, программные регуляторы, которые изменяют регулируемую величину по наперед заданной программе, следящие системы. Последние изменяют регулируемую величину по произвольному, заранее известному закону.
По характеру изменения регулирующего воздействия во времени различают регуляторы непрерывного и прерывистого действия. Выходная величина непрерывного или аналогового регулятора изменяется во времени непрерывно и представляет собой гладкую или кусочно-гладкую функцию времени. Регуляторы прерывистые в свою очередь делятся на релейные, импульсные и цифровые. Релейные регуляторы содержат релейный элемент, осуществляющий квантование управляющего сигнала по уровню. Характерной особенностью релейных регуляторов является то, что момент времени изменения уровня управляющего сигнала (т.е. сигнал на выходе формирующего блока) зависит от величины сигнала ошибки.
По структуре регуляторы могут быть приборными и аппаратными. Схема приборной системы изображена на рис.2.3, а.

Рис.2.3. Схемы приборной (а) и аппаратной (б) структур регулятора
В приборной системе сигнал с датчика подается на вторичный прибор, обычно компенсационного типа - автоматически потенциометр или уравновешенный мост со встроенным в него реостатным датчиком, к которому подключается регулирующий прибор. Другими словами, в приборных системах сигнал датчика, прежде чем попасть на вход регулятора, должен пройти через вторичный прибор. При этом одновременно с регулированием осуществляется и контроль величины регулируемого
параметра. Структурная схема аппаратной системы приведена на рис.2.3,б. В аппаратных системах сигналы с датчиков, минуя вторичный прибор, подаются непосредственно на регулирующий прибор (блок-РБ).
В настоящее время преимущественное распространение получили аппаратные системы. Причиной этому является более высокая структурная надежность аппаратных систем. Действительно, если в приборной системе откажет вторичный прибор контроля (ВПК), то одновременно прекратится работа регулятора. В аппаратной же системе при отказе системы контроля система регулирования продолжает функционировать, и наоборот - при отказе системы регулирования остается действующей система контроля, что дает возможность дистанционного управления объектом на основе показаний ВПК. Это в аппаратных системах возможно, т.к. эти две системы взаимосвязаны.
Вопросы для самопроверки:
что такое автоматический регулятор?
из каких функциональных узлов состоит автоматический регулятор?
какие узлы определяют передаточную функцию регулятора?
чем отличаются аппаратный и приборный принципы построения регулятора?