

Тема 3. Реальные регуляторы.
Отличие промышленных регуляторов от идеальных. Передаточная функция реального регулятора. Балластное звено. Область нормальных режимов и область допустимых настроек. Структурные схемы регуляторов. Анализ передаточной функции и определение передаточной функции балластного звена.
Применение промышленных регуляторов обычно предполагает, что при работе в реальных условиях эти регуляторы ведут себя как идеальные. На этом предположении основаны все известные методы расчета настроек динамических параметров регуляторов.
Реальные регуляторы составляются из реальных звеньев. Поэтому передаточные функции реальных регуляторов отличаются от передаточных функций соответствующих идеальных регуляторов. Ш.Е. Штейнберг
предложил передаточную функцию W p (p) реального регулятора представлять в виде произведения передаточной функции W и. p (p)
идеального регулятора и передаточной функции W б (p) некоторого звена,
которое получило название балластного звена:
W p (p)= W и. p (p) * W б (p) (2.29)
Если регулятор идеальный, то балластное звено W б (p)=1
В случае реального регулятора балластное звено отлично от единицы. Анализ динамики балластного звена позволяет судить об особенностях структурной схемы и настройки того или иного реального регулятора.
Степень отличия реального регулятора от идеального для одного и того же прибора может быть различной. Она зависит от величины и формы входного сигнала и от динамических настроек регулятора, т.к. последние влияют на передаточную функцию балластного звена.
Ряд исследований, выполненных ЦНИИКА (Центральный научно- исследовательский институт комплексной автоматизации) показали, что если амплитудно-фазовые характеристики реального регулятора отличаются от соответствующих характеристик идеального регулятора (в рабочем диапазоне частот) по амплитуде не более чем на 10%, а по фазе не более чем на 150, то качество регулирования, даваемое реальным регулятором в системе автоматического регулирования, будет незначительно (в
допустимой в большинстве случаев степени) отличаться от качества регулирования, даваемого в той же системе идеальным регулятором.
Это условие выполняется не при всех возможных настройках регулятора. При некоторых соотношениях между настроечными параметрами модуль или фаза АФХ реального регулятора могут отличаться от идеального больше, чем на приведенное значение. Это означает, что данный регулятор эксплуатировать в таких режимах нежелательно.
Область настроек динамических параметров реального регулятора, при которых амплитудно-фазовые характеристики реального регулятора отличаются от амплитудно-фазовых характеристик идеального регулятора, осуществляющего тот же закон регулирования не более чем на 10% по модулю и 150 по фазе, называется областью нормальных режимов регулятора (ОНР).
Совокупность настроек конкретного типа регулятора, которые могут варьироваться при его эксплуатации, зависит не только границы области нормальных режимов но и от того, в каких пределах может изменяться каждый из настроечных параметров, от расположения границ области устойчивой работы регулятора (при определенных режимах у некоторых типов регуляторов могут возникнут автоколебания во внутреннем его контуре) и области скользящих режимов. Эту область настроек в отличие от ОНР будем называть областью допустимых настроек (ОДН) регулятора.
Область допустимых настроек обычно представляют в графической форме (ОДН одного из серийных ПИ-регулятора приведена на рис.2.14).
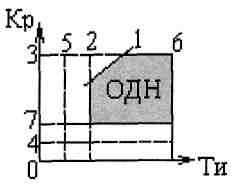
Рис. 2.14. Область допустимых настроек для ПИ-регулятора.
ОДН представляет собой область на плоскости динамических настрое
ПИ-регулятора, по оси абсцисс которой отложены значения времени
интегрирования, а по оси ординат - коэффициент усиления регулятора. Границы ОДН образуются следующими линиями:
•кривые 3, 4, 5, 6 - определяются крайними положениями ручек
настройки динамических параметров к р и Т и ;
•кривая 1 является границей области существования скользящего режима;
•кривая 7 определяется минимальной длительностью управляющих импульсов, которые могут обрабатываться исполнительным механизмом.
Скользящий режим - основной режим работы релейных регуляторов. В области, где скользящий режим не выполняется, релейные регуляторы работать не могут. Подробнее об этом будет сказано ниже.
Кривая 2 - определяется частотными характеристиками балластного звена, т.е. вышеупомянутыми условиями близости АФХ реального и идеального регуляторов.
Для ПИД-регуляторов ОНР, а также ОДН будут представлять собой уже не плоскость, а трехмерное пространство или же набор плоскостей, каждая из которых соответствует определенному значению третьего динамического параметра - времени дифференцирования Т 0 .
Для обеспечения качественной работы автоматических систем регулирования, необходимо следить, чтобы значения динамических параметров регулятора не выходили за пределы заштрихованной области. Если в результате расчета настроек, сделанных для системы, будут получены данные, не находящиеся внутри ОДН, то нужно выбрать или другой закон регулирования (например ПИД-закон), либо применить регулятор другого типа, имеющий более широкую область допустимых настроек. Если и это не решит задачу, то значит для данного случая необходимо разработать новый уникальный регулятор, обладающий требуемыми характеристиками.
Вопросы для самопроверки:
чем отличается реальный регулятор от идеального;
как определить степень отличия реального регулятора от идеального;
что такое область нормальных режимов;
что такое область допустимых настроек;
при каких условиях реальный регулятор можно считать идеальным.