

Обработка и анализ результатов моделирования систем. Метод наименьших квадратов.
Для обработки данных эксперимента существуют различные методы зависящие от цели эксперимента и вида получаемых при моделировании характеристик. В результате эксперимента получаем набор данных между которыми может существовать или отсутствовать функциональная или структурная связь. Если такая связь между фактором и откликами существует, то она проявляется в эксперименте в неявном виде, а для использования результатов эксперимента в практических целях неявную зависимость следует сделать явной и представить ее в виде функции, системы уравнений, номограммы, графика и т.п. Если функциональная зависимость между факторами и откликом отсутствует, то следует обработать их независимо друг от друга по правилам математической статистики. Первым шагом при записи аналитического выражения, аппроксимирующего требуемую зависимость является нанесение экспериментальных точек на графике нр. в прямоугольной системе координат. В результате будет получена диаграмма разброса из которой часто удается визуально найти плавную кривую и определить соответствующую ей функциональную зависимость.
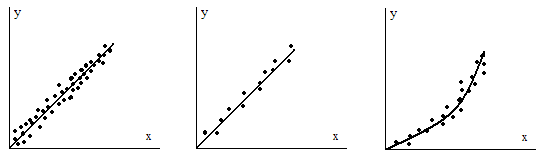
Метод наименьших
квадратов. погрешность величины х во
много меньше погрешности определения
величины у. Для определения наилучшей
кривой часто используется метод
наименьших квадратов. Идея метода
заключается в следующем: минимизировать
![]() сумму
квадратов расстояний от экспериментальных
точек до данной прямой.
сумму
квадратов расстояний от экспериментальных
точек до данной прямой.
![]()
![]() -
уравнение прямой
-
уравнение прямой




 (1)
(1)

 (2)
(2)
Применение пакета matLab для моделирования систем. Библиотека SimMechanics.
Система matlab-это язык для технических расчетов который выполняет вычисление, визуализацию и программирование в удобной среде где задачи и решения выражаются в удобной форме близкой к математической. Типичное использование matlab- математические вычисления, разработка алгоритмов, вычислительный эксперимент, имитационное моделирование, анализ данных, исследование и визуализация результатов; научная и инженерная графика; разработка приложений; включается графический интерфейс пользователя. Matlab-интерактивная система, в котором основным элементом данных является массив. Это позволяет решать многие задачи связанные с техническими вычислениями , особенно в которых используются матрицы и вектора в несколько раз быстрее чем при написании программ с использованием «скалярных» языков програм-ия таких как C++ или phortran. Matlab развивался в течении нескольких лет, ориентируясь на разных пользователей нр-в вузах он представляет собой стандартный инструмент для работы в различных областях математики, машиностроения и науки в промышленной сфере matlab это инструмент для высокопродуктивных исследований разработок и анализа данных. Система matlab состоит из 5 основных частей:
1)язык matlab
2)среда matlab
3) управляемая графика
4)библиотека математических ф-ий
5) программный интерфейс
Кроме того в сис-му matlab входит множество пакетов расширений, в частности пакет расширения simulink предназначен для моделирования динамических систем, модели которых составляются из отдельных готовых блоков. Этот пакет является 1 из самых ярких представителей программ созданных на основе системы matlab в нем реализованы принципы визуально ориентированного программирован7ия, это позволяет легко набирать нужные блоки и соединять их с целью составления моделей системы или устройств при этом уравнения состояния описывающие работу модели систем или устройств формируется автоматически по удобству графического пользовательского интерфейса обилию моделей (блоков) компонентов во множестве библиотек разнообразных виртуальных средств регистрации и визуализации рез-в моделирования и главное по его надежности и достоверности симулинк отличается от множество подобных программ, особенно это относится к открытости пакета и возможности пополнения его библиотек.
Sim mehaniks-явл составной частью семейства продуктов для моделирования физических систем в среде симулинк и позволяет моделировать систему управленияс помощью ненаправленных сигнальных графов, объединять их с физическими моделями и моделями из других библиотек. Это позволяет моделировать такие объекты как наземное транспортное средство, летательный аппарат, производственное оборудование до того как будет начато их производство.
В библиотеке симмеханикс пакета расширения симулинк отдельные блоки рассматриваются как модели имитирующие механическое движение 1 части моделируемого механизма относительно другой. Входы и выходы блока фактически таковыми не являются а имитируют посадочное место соответствующие састи механизма, линии соединения входов и выходов блоков имитируют жесткие соединения , выходной части 1 механизма с входной части другого. Можно утверждать что то соединение моделирует передачу силового воздействия м-у частями разных механизмов. Поскольку в соответствии с 3 законрм ньютона сила воздействия=силе противодействия, такую передачу силы нельзя рассматривать как однонаправленное воздействие, поэтому в блок схемах симмеханикс на линии соединений механических блоков нет изображений стрелок , указывающих направление воздействия. Симмеханикс может моделировать различные геометрические конфигурации и реакцию на механическое воздействие и вырабатывать стратегии управления, добиваться увеличения производительности и сократить время разработок того или иного устройства.
Основные функциональные возможности пакета симмеханик.
1)моделирование механических систем с использованием модели тв. Тела.
2) допускается объединение механических блоков с другими типами блоков
3) анализ 3-х мерных моделей и моделирования
4) библиотеки соединений и ограничений
5) моделирование угловых и линейных движений заданных управления сил и моментов.
После запуска программы симулинк в окне обозревателя необходимо выбрать библиотеку симмеханикс что приведет к открытию окна обозревателя разделов этой библиотеки. Библиотека симмеханикс состоит из следующих разделов:
1) bodies (тела)
2) constraints & drivers (связи и возбудители)
3)joints (сочленение)
4) force elements (силовые элементы)
5) sensors & actuators (датчики и приводы)
6) utilities (утилиты)
Body- блок раздела bodies моделирует механическую часть машины в окне настройки блока задаются масса , матрица инерции, его начальное положение и ориентация
Ground- блок раздела bodies, является обязательным при построении модели любого механизма , он представляет неизменные точки основания. Неподвижные в инерциальной системе координат. Движение остальных частей механизма задаются или определяются по отношению к системе координат, воплощаемой именно этим блоком. В окне настройка уст. 1 параметр –это вектор смещения начала системы координат, связанной с неподвижной частью механизма относительно инерциальной сис-мы координат.
Prismatic- аналог блока revoluteно имеющий небольшое отличие, он обеспечивает 1 поступательную степень свободы вдоль оси указанной в соответствующей вкладкеayes окна его настройки
Revolute-циклический шаг, устанавливает направление оси вращения тела.
Блоки JA и JS подсоединяются к joints и задают или измеряют относительное движение с помощью блока ja можно задать как функцию времени.
Bodu sensor- блок предназначен для подсоединения блока боди и измеряет абсолютное движение связанной с телом системы координат к которой он подсоединен.