

Моделирование 2-х звеного физического маятника в библиотеке SimMechanics.
Любой механизм можно представить в виде совокупности звеньев и сопряжений. Например, звухзвенный физический маятник (см. рис. 1) представляет собой последова-тельное соединение следующих элементов:
неподвижного звена (земли);
шарнирного соединения (задающего 1-му звену одну степень свободы поворот вокруг оси z);
первого звена (звено представляется как абсолютное твердое тело);
шарнирного соединения между 1-ым и 2-ым звеньями (ограничивает степени свободы 2-го звена, оставляя также только поворот в плоскости xy);
второго звена.
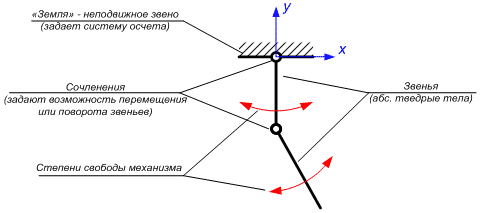 Рис.
1 - Модель двухзвенного физического
маятника
Simulink-модель такого механизма
строится в аналогичной последовательности
(см. рис. 2). Исходным элементом модели
является звено Ground - земля. К нему
присоединен элемент - Revolute (т.е. сопряжение,
позволяющее следующему звену лишь
поворачиваться вокруг указанной оси -
z).
Далее следует непосредственно звено
физического маятника Body. В качестве
параметров этого звена необходимо
указать массу тела, моменты инерции
относительно главных центральных осей
симметрии, а также координаты верхнего,
нижнего конца звена и его центра масс.
При этом координаты можно задавать как
в глобальной системе координат (ГСК),
так и в локальной системе координат
(ЛСК) звена.
Аналогично, к первому
звену посредством шарнирного соединения
Revolute 1 присоединяется второе звено Body
1.
Чтобы звенья спроектированного
механизма начали движение необходимо
либо добавить вынуждающую силу, либо
задать начальные условия (например,
начальное отклонение или сообщить
начальную скорость). Для реализации
последних используется блок Initial
Condition.
Рис.
1 - Модель двухзвенного физического
маятника
Simulink-модель такого механизма
строится в аналогичной последовательности
(см. рис. 2). Исходным элементом модели
является звено Ground - земля. К нему
присоединен элемент - Revolute (т.е. сопряжение,
позволяющее следующему звену лишь
поворачиваться вокруг указанной оси -
z).
Далее следует непосредственно звено
физического маятника Body. В качестве
параметров этого звена необходимо
указать массу тела, моменты инерции
относительно главных центральных осей
симметрии, а также координаты верхнего,
нижнего конца звена и его центра масс.
При этом координаты можно задавать как
в глобальной системе координат (ГСК),
так и в локальной системе координат
(ЛСК) звена.
Аналогично, к первому
звену посредством шарнирного соединения
Revolute 1 присоединяется второе звено Body
1.
Чтобы звенья спроектированного
механизма начали движение необходимо
либо добавить вынуждающую силу, либо
задать начальные условия (например,
начальное отклонение или сообщить
начальную скорость). Для реализации
последних используется блок Initial
Condition.
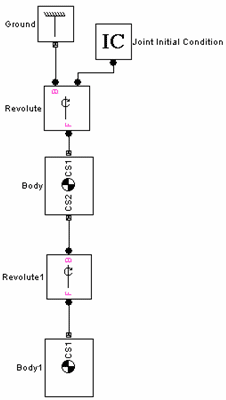 Рис.
2 - Simulink-модель двухзвенного физического
маятника
На модели имитации
отображаются звенья, колеблющиеся по
законам классической механики (физики
твердого тела). Там же отображаются
локальные системы координат (ЛСК)
звеньев.
Вопрос о выборе той или иной
системы координат (СК) является очень
важным. Правильный выбор СК значительно
облегчает моделирование механизма и
интерпретацию результатов.
Рис.
2 - Simulink-модель двухзвенного физического
маятника
На модели имитации
отображаются звенья, колеблющиеся по
законам классической механики (физики
твердого тела). Там же отображаются
локальные системы координат (ЛСК)
звеньев.
Вопрос о выборе той или иной
системы координат (СК) является очень
важным. Правильный выбор СК значительно
облегчает моделирование механизма и
интерпретацию результатов.
Сетевые методы моделирования системы сети Петри.
Сеть Петри состоит из 4 компонентов, которые и определяют ее структуру:
- множество позиций Р,
- множество переходов Т,
- входная функция I,
- выходная функция О.
Входная и выходная функции связаны с переходами и позициями. Входная функция I отображает переход tj в множество позиций I(tj), называемых входными позициями перехода. Выходная функция О отображает переход tj в множество позиций О(tj), называемых выходными позициями перехода. Т.е.
( I : T -> P)
(O : T -> P).
Сеть Петри N является четверкой N=(P,Т,I,O), где
P={p1, p2,...,pn} — конечное множество позиций, n0;
T={t1, t2,...,tm} — конечное множество переходов, m0;
I: T P* — входная функция, сопоставляющая переходу мультимножество его входных позиций;
О: T P* — выходная функция, сопоставляющая переходу мультимножество его выходных позиций.
Позиция pP называется входом для перехода tT, если pI(t). Позиция pP называется выходом для перехода tT, если pO(t). Структура сети Петри определяется ее позициями, переходами, входной и выходной функциями.
Пример 2.1. Сеть Петри. Пример Граф сети Петри |
|
|
|
N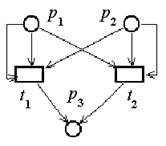 =(P,T,I,O),
=(P,T,I,O),
P={p1, p2, p3},
T={t1, t2},
I(t1)={ p1, p1, p2}, O(t1)={p3},
I(t2)={ p1, p2, p2}, O(t12)={p3}.
Использование мультимножеств входных и выходных позиций перехода, а не множеств, позволяет позиции быть кратным входом и кратным выходом перехода соответственно. При этом кратность определяется числом экземпляров позиции в соответствующем мультимножестве.
Переход t называется входом для позиции p, если p является выходом для t. Переход t называется входом для позиции p, если p является входом для t. Существуют альтернативные, эквивалентные определения сетей Петри. В частности, функции I и O могут быть определены, таким образом, чтобы сопоставлять позициям входные и выходные мультимножества переходов соответственно.
Графы сетей Петри.
Наиболее наглядным представлением сети Петри является её графическое представление, которое представляет собой двудольный, ориентированный мультиграф.
Граф сети Петри обладает двумя типами узлов: кружок m, представляющий позицию сети Петри; и планка , представляющая переход сети Петри. Ориентированные дуги этого графа (стрелки) соединяют переход с его входными и выходными позициями. При этом дуги направлены от входных позиций к переходу и от перехода к выходным позициям. Кратным входным и выходным позициям перехода соответствуют кратные входные и выходные дуги.
Пусть задана следующая структура сети Петри: C = (P,T,I,O), n=5, m=4
P = {p1,p2,p3,p4,p5} T = {t1,t2,t3,t4}
I(t1)={p1} O(t1)={p2,p3,p5}
I(t2)={p2,p3,p5} O(t2)={p5}
I(t3)={p3} O(t3)={p4}
I(t4)={p4} O(t4)={p2,p3}
Для сети, изображенной на рис. расширенными входной и выходной функциями являются:
I(p1)={} O(p1)={t1}
I(p2)={t1,t4} O(p2)={t2}
I(p3)={t1,t4} O(p3)={t2,t3}
I(p4)={t3} O(p4)={t4}
I(p5)={t1,t2} O(p5)={t2}