

Методы упрощения сложных систем. Быстрые, средние, медленные времена.
Быстрые, средние и медленные времена
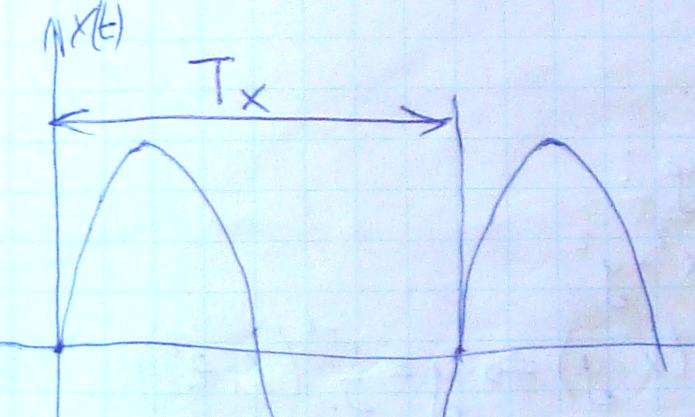
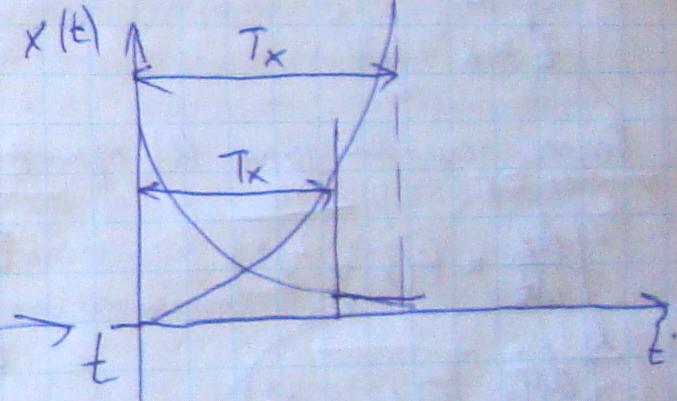
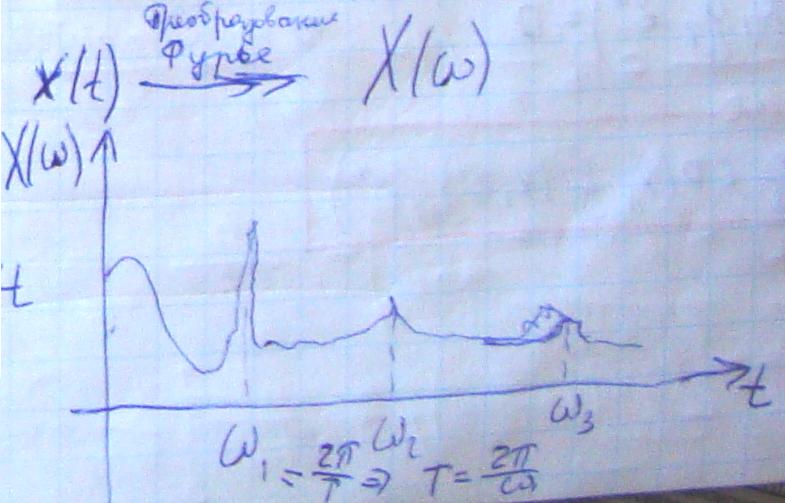
dx/dt=P(x, y, z) Tx – характерное время изменения x
dy/dt=Q(x, y, z) Ty - характерное время изменения y
dz/dt=R(x, y, z) Tz - характерное время изменения z
![]()
![]()
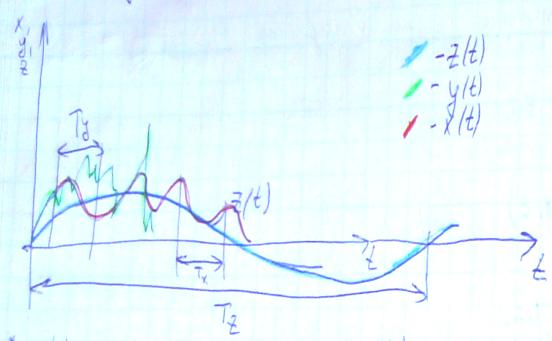
Пусть Tx ~Ty (сравнимы м/у собой). Tx,Ty<<Tz
z(t)=const=z*, то dz/dt=0, R(x,y,z*)=0
Н-р:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Модель всплеска численности популяции.
Модель вспышки численности популяции
Примером практической модели, демонстрирующей 2 линейно устойчивых стационарных состояния популяции является модель следующего вида:
![]()
где rB – характеризует линейный рост численности популяции,
КВ - характеризует емкость среды, которая зависит от плотности распределения пищи
p(N) – выражает истребление элементов популяции, в основном за счет их поедания хищниками
К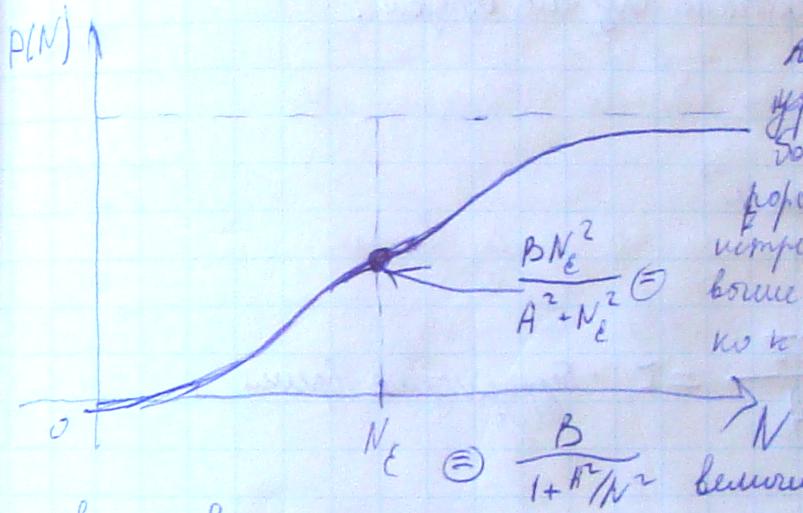 ачественно
зависимость p(N)
выражается следующим образом: рис.
ачественно
зависимость p(N)
выражается следующим образом: рис.
Истребление обычно достигает уровня насыщения при достаточно больших N. Существует определенно пороговая величина Nε, ниже которой истребление мало, в то время как выше этой величины истребление близко к уровню насыщения. Такая функциональная модель подобна переключателю, где Nε – это критическая величина, соответствующая в некотором смысле переключения.
![]()
![]()
![]()
A и В – положительные константы, тогда динамика численности популяции N(p) определяется следующим уравнением:
![]()
Это уравнение
имеет 4 параметра: rB,
KB,
A,
B.
При этом
коэффициенты А и КВ
имеют такую же размерность как и N,
коэффициент [rB]=![]()
Коэффициент В
имеет размерность [B]=![]()
А – величина порога, при которой включается истребление. Если величина А мала, то порог тоже мал.
При моделировании
часто бывает удобным привезти модель
к базисному виду. Данная операция часто
дает исследованию ряд преимуществ. Н-р,
используемый в ходе анализа единицы
измерения после приведения к безразмерному
виду становится неважным и можно привезти
сопоставление «больших» и «малых»
характеристик систем. К тому же в
результате этой операции всегда
происходит числа значимых параметров,
определяющих динамику системы. Здесь
введем безразмерную величину следующим
образом ![]()
A1=1 м-3, А2=150 м-3, А3=10000 м-3
![]() ,
,
![]()
![]() – безразмерное
время
– безразмерное
время
![]()
Процесс приведения к безразмерному виду:
![]()

![]()
![]()
![]()
Полученное уравнение (1) имеет только 2 параметра r и u, которые являются безразмерными величинами. В данном случае u<<1 означает что N<<A. В реальных переменных это означает, что истребление при данной численности можно пренебречь. В любой модели обычно существуют несколько разных возможностей приведения к безразмерному виду.
Стационарное состояние уравнения (1) является решением следующего уравнения
![]() (2)
(2)
![]() => 1) u=0
=> 1) u=0
 2)
2)
![]() (3)
(3)
(лк №18)
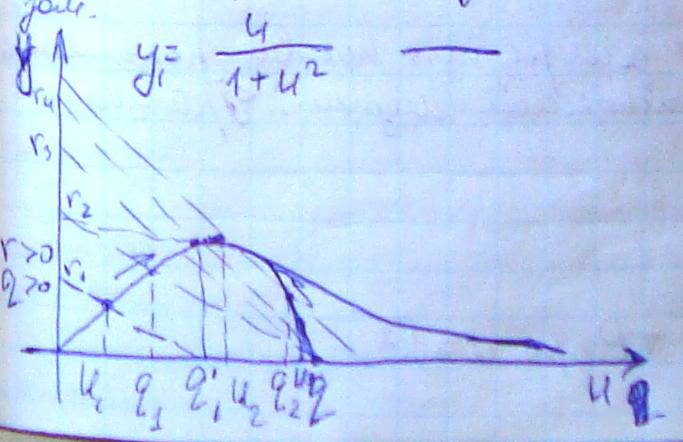
Наименьшее решение уравнения (3) удобнее определить графически следующим образом
![]() ;
; ![]() ;
;
![]()
![]()
![]()
![]()
Это один из способов решения систем. Надо исследовать устойивые или неустойчивые стационары. Для этого надо их линеаризовать.
И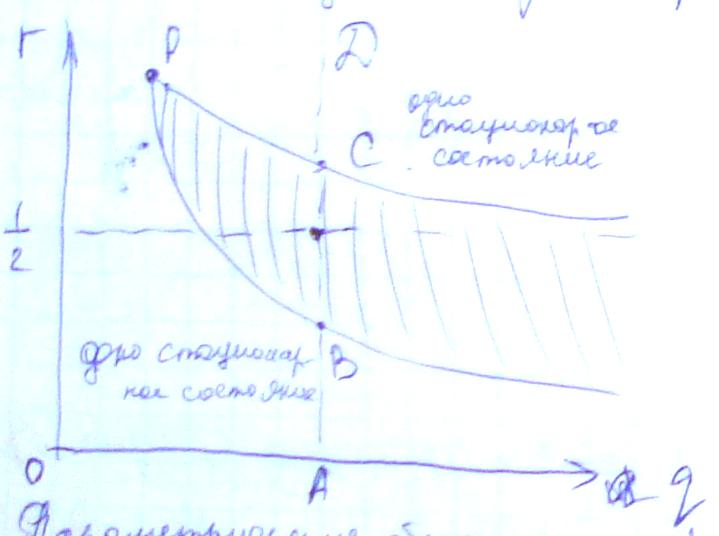 з
данного рисунка следует что существует
область значений параметров r
и q,
где уравнение (3) имеет 3 корня.
з
данного рисунка следует что существует
область значений параметров r
и q,
где уравнение (3) имеет 3 корня.
Данная модель т.о. демонстрирует эффект гистерезиса
Параметрические области существования для разного количества положительных стационарных состояний рассматриваемой модели. Граничные кривые заданы параметрически
![]()
Пусть мы имеем фиксированную величину q и пусть r возрастает от 0 вдоль линии ABCD, при этом q=A, тогда если q1=0 (стационарное состояние) при r=0, то значение u1 монотонно возрастает с ростом r до тех пор, пока не будет достигнута точка С. При более высоких значениях r это стационарное состояние исчезает и система перескакивает в другое равновесное состояние в точку u3. Если уменьшать параметр r, то система останется в положении u3 до тех пор, пока r не достигнет нижней критической величины, где опять будет существовать только одно стационарное состояние и оттуда произойдет перескок из u3 в состояние u1.
Другими словами по мере роста r вдоль ABCD происходит скачок вверх в т.С, в то время как при уменьшении r от D до А происходит скачок вниз в т.В. Это пример возникновения катастроф в системе.