

Решение
Методика построения плана ускорений до точки “c3” включительно аналогична описанной в примере 1. Поэтому приведем только необходимые вычисления, векторные равенства, пропорции и краткие пояснения к построениям.
1. Определим ускорение точки A1
![]() =
152
· 0,096 = 21,6 м/с2.
=
152
· 0,096 = 21,6 м/с2.
Вектор
![]() направлен
вдоль AO
от точки А
к точке О.
направлен
вдоль AO
от точки А
к точке О.
2. Определим ускорение точки A3. Составим векторные равенства ( 13 и 14):
![]() ;
;
,
где
![]() = 2 · 3,8 · 0,98 ≈ 7,45 м/с2;
= 2 · 3,8 · 0,98 ≈ 7,45 м/с2;
![]() =
3,82
· 0,280 ≈ 4 м/с2.
=
3,82
· 0,280 ≈ 4 м/с2.
Направление
вектора
![]() определим с помощью плана скоростей
(рис. 7, б). Вектор
определим с помощью плана скоростей
(рис. 7, б). Вектор
![]() параллелен BD;
вектор
параллелен BD;
вектор
![]() перпендикулярен BD;
вектор
перпендикулярен BD;
вектор
![]() параллелен BD
и направлен
от точки А
к точке В.
параллелен BD
и направлен
от точки А
к точке В.
3. Определим масштабный коэффициент плана ускорений.
Примем
![]() =
108 мм и по
формуле (15) вычислим
=
108 мм и по
формуле (15) вычислим
![]() =
21,6 / 108 = 0,2 [(м/с2)/мм].
=
21,6 / 108 = 0,2 [(м/с2)/мм].
Определим длины векторов, изображающих на плане ускорений и :
![]() =
7,45 / 0,2 = 37 мм;
=
7,45 / 0,2 = 37 мм;
![]() =
4 / 0,2 = 20 мм.
=
4 / 0,2 = 20 мм.
4. На основании равенств (13) и (14) проведем построения:
◊ из произвольного полюса π проведем луч, параллельный АО в направлении
вектора
![]() ;
отложим на нем отрезок πa1=
108 мм
(рис. 12, б);
;
отложим на нем отрезок πa1=
108 мм
(рис. 12, б);
◊ из
точки “a1”
проведем луч, перпендикулярный ВС
в направлении
![]()
(см. рис. 7, б) и отложим на нем отрезок a1k1 = 37 мм;
◊ из точки “π ” проведем луч, параллельный ВС в направлении вектора
(то есть в направлении от А к В), и отложим на нем отрезок πn = 20 мм;
◊ через точку “k1 ” проведем прямую, параллельную ВС (это линия действия вектора ), а через точку n – прямую, перпендикулярную ВС
(это линия действия вектора ). На их взаимном пересечении получим
точку “a3”; соединив ее с полюсом π, получим вектор – ускорение
точки А3 кулисы в масштабе μa.
5. Определим ускорения точек C3 и D; составим пропорции для плана ускорений:
![]() =
BC
/ BA;
=
BC
/ BA;
![]() =
BD
/ BA.
=
BD
/ BA.
Откуда получим
![]() ,
,
![]() .
.
где
длина отрезка
![]() =
41 мм получена измерением на плане
ускорений (рис.12, б);
длины отрезков BA
= 70 мм и BC
= 99 мм получены измерениями на плане
положения механизма (рис. 12, a);
длина отрезка BD
= 115 мм получена вычислением при построении
плана положения механизма.
=
41 мм получена измерением на плане
ускорений (рис.12, б);
длины отрезков BA
= 70 мм и BC
= 99 мм получены измерениями на плане
положения механизма (рис. 12, a);
длина отрезка BD
= 115 мм получена вычислением при построении
плана положения механизма.
Так как на плане положения механизма точки А3, C и D расположены по одну сторону от оси вращения В, то и на плане ускорений точки ”a3” “с3” и "d" должны быть расположены также по одну сторону от полюса π. Следовательно, точки “с3” и "d" лежат на продолжении πa3. В соответствии с этим на продолжении луча πa3 отложим отрезки πс3 = 58 мм и πd = 67 мм (рис. 12, б).
6. Определим ускорение точки C5 ; составим векторное равенство:
![]() ,
(20)
,
(20)
где ![]() .
.
Направление
вектора
![]() определим с помощью плана скоростей
определим с помощью плана скоростей
(рис.
7, б), повернув на
по ω3
вектор
![]() ;
вектор
параллелен BD;
вектор
;
вектор
параллелен BD;
вектор
![]() параллелен
оси (x
– x1),
так как точка C5
принадлежит
рейке 5.
параллелен
оси (x
– x1),
так как точка C5
принадлежит
рейке 5.
Вычислим: ![]() = 3,65 / 0,2 = 18 мм.
= 3,65 / 0,2 = 18 мм.
8.
На основании равенства (20) из точки
“c3”
проведем луч, перпендикулярный BD
в направлении
![]() ;
отложим на нем отрезок c3k2
=18 мм;
через точку “k2”
проведем прямую, параллельную BD
(это линия действия вектора
;
отложим на нем отрезок c3k2
=18 мм;
через точку “k2”
проведем прямую, параллельную BD
(это линия действия вектора
![]() ),
а через полюс π
– горизонтальную прямую. На их взаимном
пересечении получим точку “c5”.
),
а через полюс π
– горизонтальную прямую. На их взаимном
пересечении получим точку “c5”.
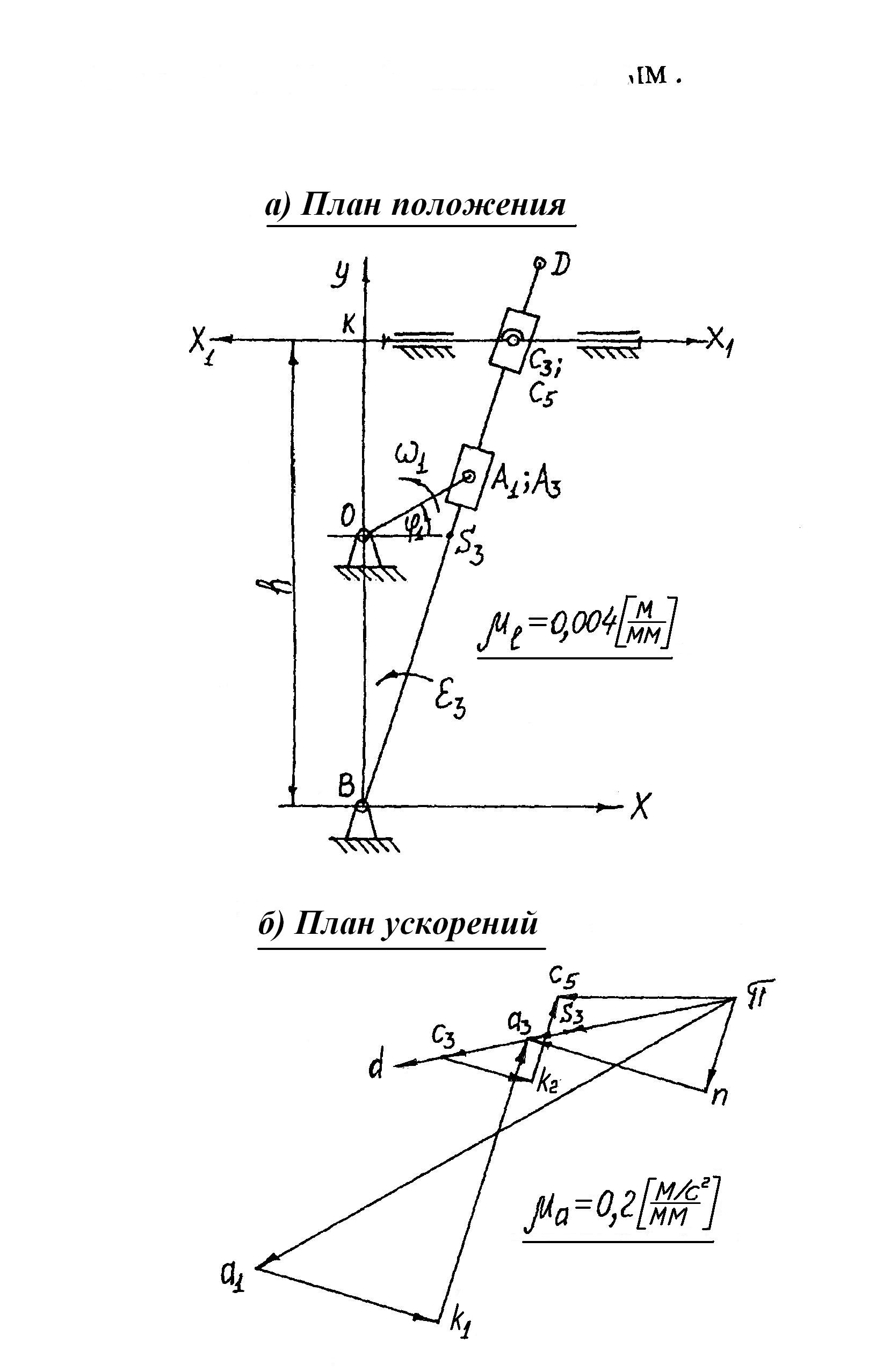
Рис. 12
9. Используя масштабный коэффициент μa, вычислим:
◊ ускорение точки C5:
![]() ;
;
◊ ускорение центра масс S3 кулисы BD:
![]() м/
с2;
м/
с2;
◊ угловое ускорение кулисы BD:
![]() рад/с2,
рад/с2,
где длина отрезка πc5 = 34 мм получена измерением на плане ускорений;
lAB = BA·μl = 70 · 0,004 = 0,28 м; длина отрезка ВА = 70 мм получена измерением на плане положения механизма (рис. 12, а).
Пример 4. Построим план ускорений (рис. 13, б) механизма подачи суппорта долбежного станка. Схема механизма изображена на рис. 13, а.
Для решения задачи необходимо предварительно построить план положения и план скоростей механизма.
План положения механизма построен на рис. 13,а. План скоростей механизма построен на рис. 13, б. Методика этих построений была рассмотрена в параграфах 1.1 и 1.2.
Исходные
данные:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]()
![]() ;
;
![]() ;
;
По плану скоростей (рис. 8, б) определили:
![]() ;
;
![]() ;
;
![]() .
.
Методика построения для кулисной части механизма (звенья 1, 2 и 3) описана в примере 2. Поэтому приведем только необходимые вычисления, векторные равенства, пропорции и краткие пояснения к построениям.
1. Определим ускорение очки A1
![]() ;
;
вектор направлен вдоль AO (см. рис. 13, а);
2. Определим ускорение точки A3. Составим векторные равенства (13) и (14):
;
,
где ![]() ;
;
![]() ;
;
![]() ;
;
направление
вектора
![]() определим,
используя план скоростей (рис. 8, б);
вектор
определим,
используя план скоростей (рис. 8, б);
вектор
![]() параллелен
BE;
вектор
параллелен
BE;
вектор
![]() перпендикулярен BE;
вектор
перпендикулярен BE;
вектор
![]() направлен вдоль BE
(см. рис.
13, а);
направлен вдоль BE
(см. рис.
13, а);
3. Определим масштабный коэффициент плана ускорений.
Примем
![]() =
106 мм и по
формуле (15) вычислим
=
106 мм и по
формуле (15) вычислим
= 10,58 / 106 ≈ 0,1 [(м/с2)/мм].
Определим длины векторов, изображающих на плане ускорений и :
![]()
![]() ;
;
4. На основании равенств (13) и (14) проведем построения:
◊ из произвольного полюса π проведем луч, параллельный АО в направлении
вектора ; отложим на нем отрезок πa1= 106 мм (рис. 13, б);
◊ из точки “a1” проведем луч, перпендикулярный ВС в направлении
(см. рис. 8, б) и отложим на нем отрезок a1k = 40 мм;
◊ из точки “π ” проведем луч, параллельный ВС в направлении вектора
и отложим на нем отрезок πn1 = 23 мм;
◊ теперь через точку “k” проведем прямую, параллельную ВС (это линия действия вектора ), а через точку n1 – прямую, перпендикулярную ВС
(это линия действия вектора ). На их взаимном пересечении получим
точку “a3”; соединив ее с полюсом π, получим вектор – ускорение
точки А3 кулисы в масштабе μa.
5. Определим ускорения точек E, S3 и C; составим пропорции для плана ускорений:
πe / πa3 = BE / BA; πs3 / πa3 = BS3 / BA; πc / πa3 = BC / BA;
откуда получим:
![]() ;
;
![]() ;
;
πc = πa3·BC / BA = 36·40/85 ≈ 17 мм,
где длина отрезка = 36 мм получена измерением на плане ускорений (рис.13, б); длина отрезка BA = 85 мм получена измерением на плане положения механизма (рис. 13, a); длины отрезков BE = 112 мм, BS3 = 36 мм и BC = 40 мм получены вычислением при построении плана положения механизма (см. § 1.2, пример 4).