

МИНОБРНАУКИ РОССИИ
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ БЮДЖЕТНОЕ
УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«РОССИЙСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ТУРИЗМА И СЕРВИСА»
(ФГБОУ ВПО «РГУТис»)
Ю.А.Матвеев, Е.Б.Александров
ОСНОВЫ ФУНКЦИОНИРОВАНИЯ
СИСТЕМ СЕРВИСА
Теория механизмов и машин
Кинематический анализ кулисных механизмов
Учебное пособие
Москва 2011
Введение. Основные задачи кинематического анализа механизмов
При проектировании новых машин и механизмов возможны два пути:
1)разработка по заданным техническим условиям нескольких вариантов новой системы методами метрического синтеза;∙
2)отбор наиболее подходящей системы из ряда существующих аналогичных конструкций в результате их сравнительного анализа.
В обоих случаях выбор оптимального варианта производят после исследования схем механизмов и определения их кинематических и динамических параметров.
Кинематический анализ механизма, то есть изучение движения его звеньев без учета сил, обусловливающих это движение, состоит в решении трех следующих задач:
1)определение положений звеньев и траекторий отдельных точек механизма;
2)определение скоростей звеньев и отдельных точек механизма;
3)определение ускорений звеньев и отдельных точек механизма.
В результате кинематического анализа устанавливают соответствие кинематических параметров (перемещений, скоростей, ускорений) заданным условиям, а также получают исходные данные для выполнения динамических расчетов.
Знание кинематических параметров необходимо для расчета сил инерции и моментов сил инерции, кинетической энергии механизма и мощности.
Кинематический анализ механизмов выполняют графическими и аналитическими методами. Графические методы отличаются наглядностью и относительной простотой, но не дают точных результатов. Кроме того, использование этих методов становится затруднительным, если требуется проанализировать кинематику механизма для ряда последовательных положений ведущего звена. В этом случае возрастает объем необходимых графических работ, увеличивается время исследования. Аналитические методы позволяют получить требуемую точность результатов и установить в аналитической форме функциональную зависимость кинематических параметров механизма от метрических параметров звеньев. При современном уровне развития вычислительной техники основной сложностью аналитического метода является разработка алгоритма решения задачи и составление программы реализации этого решения на ПК.
В целях лучшего усвоения изучаемого материала студенту необходимо владеть как графическими, так и аналитическими методами кинематического анализа механизмов. Рассмотрим эти методы.
Глава 1. Графические методы кинематического анализа.
При графических методах кинематического анализа первая задача решается методом планов положений, вторая – методом планов скоростей и третья – методом планов ускорений механизма.
Рассмотрим применение этих методов на конкретных примерах.
§ 1.1. Метод планов положений.
Пример 1. Построим планы последовательных положений механизма подачи суппорта строгального станка. Схема механизма представлена на рис. 1.
Исходные данные: lOA = 0,070 м; lOB = 0,270 м; lBC = 0,390 м; h = 0,430 м.
Количество последовательных положений определяется требуемой точностью результатов кинематического анализа. Обычно при графическом решении задачи строится 12 положений механизма (рис. 2). Построения должны проводиться в масштабе. Масштабный коэффициент μl определяется по формуле:
μl = lOA / OA, [м/мм] (1)
где lOA – заданная длина кривошипа OA, [м];
OA – длина кривошипа, принятая при построении планов положений механизма, [мм].
В рассматриваемой схеме задана длина кривошипа lOA = 0,07 м.
Примем при построении длину кривошипа OA = 35 мм и по формуле (1) получим:
μl = lOA / OA = 0,07/35 = 2∙10-3 [м/мм].
Построения проводим в следующей последовательности (рис. 2):
◊ через точку О проведем вертикальную прямую и отложим на ней отрезок
ОВ = lOB/μl = 0,27/0,002 = 135 мм;
◊ введем систему координат хВу;
◊ отложим вдоль оси Ву отрезок ВЕ = h/μl = 0,43 /0,002 = 215 мм;
◊ через точку Е проведем горизонтальную прямую – ось (x – x1) движения
горизонтальной рейки звена 5;
◊ построим
окружность “![]() ”
“пальца” кривошипа радиусом ОА
= 35
мм;
”
“пальца” кривошипа радиусом ОА
= 35
мм;
◊ построим дугу окружности “с” радиусом R = BC = lBC / μl = 0,39 / 0,002 =
= 195мм;
◊ построим два крайних положения кулисы ВС; для этого проведем через точку
"В" две касательные к окружности “a” “пальца” кривошипа (справа ─ касательную 1 и слева ─ касательную 2) до их пересечений с окружностью “c”;
◊ из точки О опустим перпендикуляры на эти касательные; в результате получим два положения точки А “пальца” кривошипа;
◊ примем правую точку за начальную и обозначим ее А0; тогда левую точку
обозначим АК; соответственно, правую точку С обозначим С0, а левую – СК;
◊ через точки С0 и СК проведем вертикальные прямые до их пересечений с осью
(x – x1); получим точки D0 и DК. D0DК = SDmax – ход ползуна 5.
Таким образом, мы построили два крайних положения механизма, в которых кулиса 3, а, следовательно, и ползун 5 неподвижны.
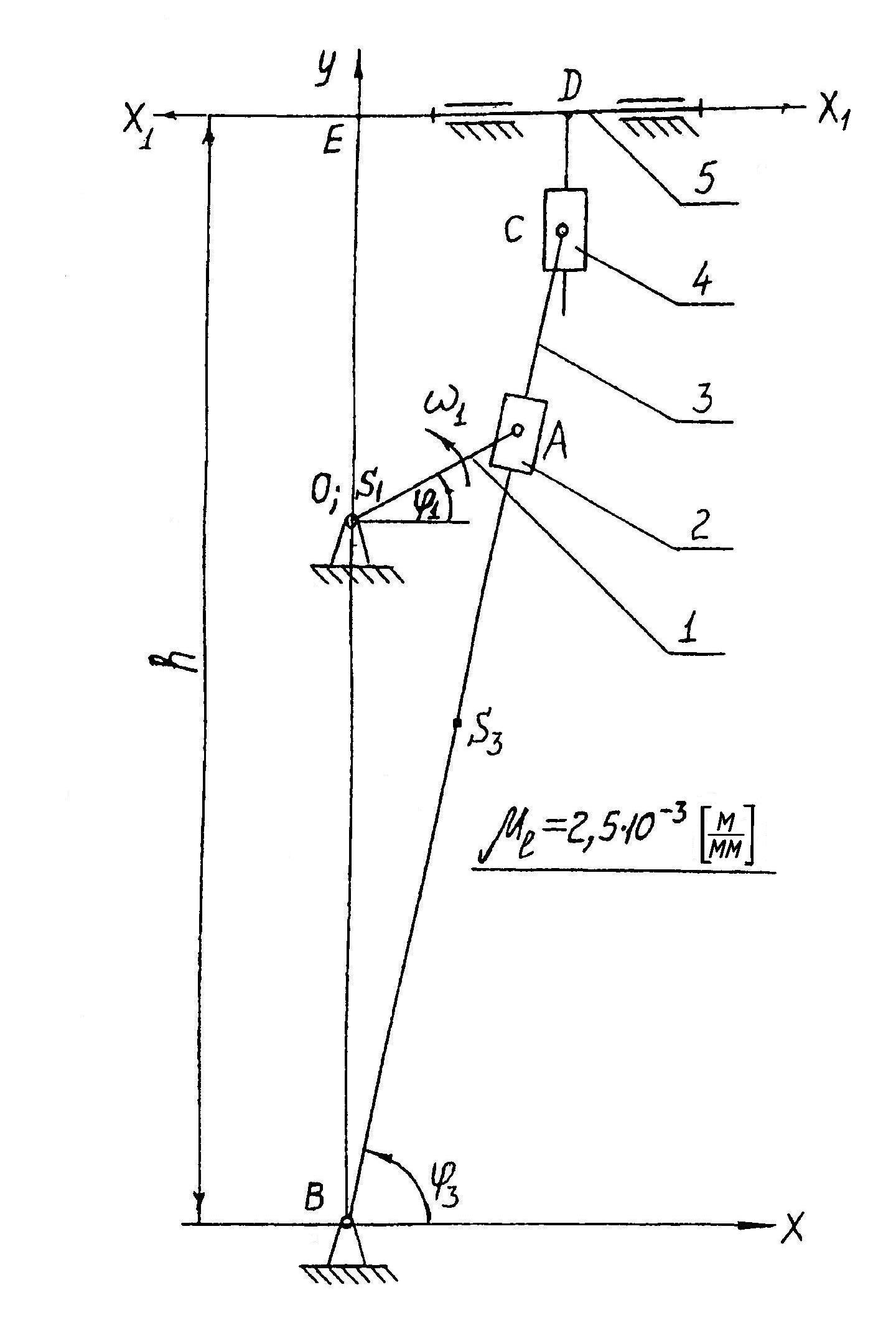
Рис. 1
Положение кривошипа OA0 принято за начальное из следующих соображений:
1) для получения большего КПД механизма необходимо, чтобы время рабочего хода было больше времени холостого хода, то есть tрх > tхх; время рабочего хода ─ это время перемещения ползуна 5 из начального положения в конечное; время холостого хода ─ это временя перемещения ползуна 5 из конечного положения в начальное;
2) это условие обеспечивается неравенством φрх > φхх (см. рис. 2); если при заданном направлении вращения кривошипа поменять местами начальное и конечное положения механизма, то получим неравенство φрх < φхх, что недопустимо.

Рис. 2
Продолжим построения:
◊ разделим окружность “a” на 12 равных частей; построим последовательные
положения точки A “пальца” кривошипа и пронумеруем их в соответствии с
заданным направлением вращения, то есть против хода часовой стрелки;
◊ проведя через точку B и точки A1, A2…, A12 прямые до их пересечений с дугой
окружности “с”, получим последовательные положения кулисы BC;
◊ проведем через точки C1, C2,…, C12 вертикальные прямые до их пересечений
с осью (x – x1); в результате получим последовательные положения точки D
ползуна 5, а, следовательно, и все последовательные положения механизма.
Следует учесть, что в большинстве случаев точки A0 и AК оказываются промежуточными между двумя последовательными положениями точки A, например, между A12 и A1, и между A7 и A8 (см. рис. 2).
Таким образом, начальное и конечное положения механизма, как правило, оказываются дополнительными.
Пример 2. Построим планы последовательных положений для второй модели механизма подачи суппорта строгального станка. Схема механизма представлена на рис. 3.
Исходные данные: lOA = 0,05 м; lOB = 0,1 м; lBC = 0,2 м; lCD = 0,12 м; h = 0,23 м.

Рис. 3
При построении планов положений механизма примем длину кривошипа ОА = 25 мм и вычислим по формуле (1) масштабный коэффициент длины
μl = lOA / OA = 0,05/25 = 0,002 [м/мм]; через произвольную точку O (рис. 4) проведем вертикальную прямую и отложим на ней в выбранном масштабе μl отрезки OB = lOB / μl = 0,100/0,002 = 50 мм и BE = h / μl = 0,23/0,002 = 115 мм.
В результате получим положение точки В оси вращения кулисы ВС и положение оси (x – x1) движения ползуна 5.
Последовательные положения чисто кулисной части механизма (звенья 1, 2 и 3) строятся по методике, описанной в примере 1. Для построения последовательных положений шатуна CD и точки D ползуна 5 из точек C0, C1,…, C11 сделаем засечки раствором циркуля R = CD = lCD /μl= 0,12/0,002 = 60 мм на оси (x – x1) (рис. 4); полученные таким образом точки D0, D1,…, D11 соединим с точками C0, C1, …, C11. Построения планов положений механизма закончены. По результатам построения строится диаграмма перемещений ведомого (исполнительного) звена механизма, то есть диаграмма SD = f1 (t).
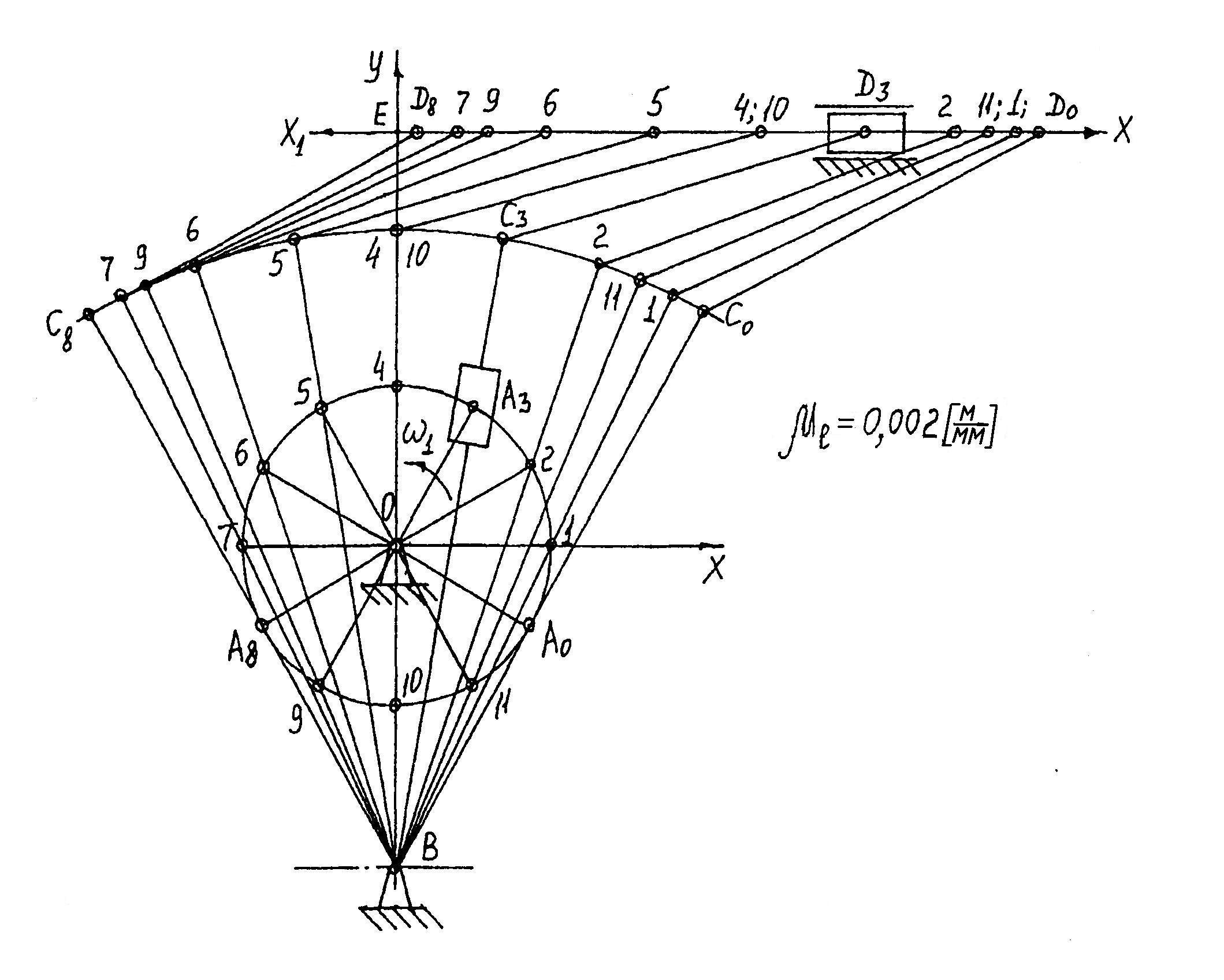
Рис. 4
Построение диаграммы перемещений. Используя планы положений механизма, построим диаграмму перемещений исполнительного (ведомого звена). Например, для механизма, изображенного на рис. 1 – это диаграмма перемещений точки D – SD = f1(t). Для построения диаграммы измерим на рис. 2 отрезки D0D1 , D0D2 ,…, D0D12 и, используя масштабный коэффициент длины μl, вычислим величину каждого текущего положения точки D по формуле:
SDi = D0Di · μl.
Например, для положения 1 получим:
SD1=׀D0D1׀· μl=2[мм] · 0,002 [м/мм] = 0,004 м = 4 мм;
для положения 2 получим:
SD2 = | D0D2 | ·μl =13 · 0,002 = 0,026 м = 26 мм.
По результатам измерений и вычислений составим таблицу 1.
Таблица 1
-
№ пол.
0
1
2
3
4
5
6
SD , мм
0
4
26
61
102
143
179
№ пол.
7
K
8
9
10
11
12
SD , мм
200
204
200
165
102
37
4
Диаграмма перемещений строится в масштабе. Масштабный коэффициент μS определяется по формуле
μs = SDmax / hmax [м/мм], (2)
где SDmax = SDk = 0,204 м;
hmax – отрезок на оси ординат диаграммы, соответствующий максимальному перемещению точки D, то есть в рассматриваемом примере hmax = hK.
Величина отрезка hmax выбирается из условия 80 мм ≤ hmax ≤ 120 мм. Примем hmax = 102 мм и вычислим по формуле (2) масштабный коэффициент перемещений: μS = 0,204 / 102 = 0,002 [м/мм] = 2∙10-3 [м/мм], что соответствует масштабу 1:2.
Используя таблицу 1 и коэффициент μS , вычислим длины отрезков по оси ординат диаграммы и составим таблицу 2 для построений.
Таблица 2
-
№ пол.
0
1
2
3
4
5
6
hD, мм
0
2
13
30,5
51
71,5
89,5
№ пол.
7
K
8
9
10
11
12
hD, мм
100
102
100
82,5
51
18,5
2
Вычисления проводятся по формуле hDi =SDi / μS.
Так, в рассматриваемом примере, длина отрезка в положении 2
hD2 = SD2 / μS = 0,026 [м] / 0,002 [м/мм] = 13 мм, в положении 3
hD3 = SD3 = 0,061 / 0,002 = 30,5 мм и т.д. Так как коэффициент μS = 0,002 [м/мм] соответствует масштабу 1:2 , то величину hD в строке таблицы 2 можно получить, разделив на 2 соответствующую величину SD в таблице 1. Для построения диаграммы перемещений введем систему координат O,SD,t (рис. 14). Зададимся длиной отрезка L вдоль оси Ot; примем L = 180 мм. Разделим этот отрезок на части, прямо пропорциональные текущим значениям угла поворота кривошипа ОА. Длина отрезка [0-1] на оси Оt диаграммы определится из пропорции φо/30о = [0-1] / 15 мм; откуда получим [0-1] = 15 ∙ φо / 30о.
В рассматриваемом примере величину угла φ1 определим следующим образом (см. рис. 2): φ1 = угол ОВА0 = arcsin(OA/OB) = arcsin (74/286) = 15o.
Следовательно, длина отрезка [0-1] = 15∙15о/30о = 7,5 мм и длина отрезка [12- 0] =15 – [0-1] = 15–7,5 = 7,5 мм. Отрезок [1-12] разделим на 11 равных частей по 15 мм, то есть [1-2] = [2-3] = [3-4] = …= [11-12] = 15 мм. Положение точки K на оси Ot определяется длиной отрезка [7-K] = [0-1].
Вычислим масштабный коэффициент времени: μt = tц /L,
где tц – время кинематического цикла (одного полного оборота кривошипа);
tц = (2·π,рад) / (ω1,рад/с) = 2·π / 27 = 0,2327 c;
μt =2·π / (27·180) = 0,00129 [с/мм] = 1,29·10-3 [c/мм].
Для
построения кривой
![]() из точек 1, 2,…, 12 на оси
из точек 1, 2,…, 12 на оси
![]() восстановим перпендикуляры к этой
оси и отложим на каждом из них
соответствующий отрезок hD
из таблицы 2 , то есть из точки 1 отложим
отрезок hD1
= 2 мм,
из точки 2 – отрезок hD2
= 13 мм
и так далее. Полученные точки соединим
плавной кривой.
восстановим перпендикуляры к этой
оси и отложим на каждом из них
соответствующий отрезок hD
из таблицы 2 , то есть из точки 1 отложим
отрезок hD1
= 2 мм,
из точки 2 – отрезок hD2
= 13 мм
и так далее. Полученные точки соединим
плавной кривой.