

Форсирующее звено 2-го порядка
ПФ:
![]()
При k=1 ЛЧХ – зеркальные отображения ЛЧХ колебательного звена относительно оси частот.
Форсирующие звенья как первого, так и второго порядка физически неосуществимы.
Минимально-фазовые звенья
В общем случае
 ;
;
где
k’=b0/a0 - приведенный коэффициент усиления;
![]() ;
;
![]() ;
;
![]() .
.
Это приведенные многочлены (коэффициент при старшем члене равен 1).
По теореме Безу:

Здесь zj,![]() - нули ПФ; si,
- нули ПФ; si,
![]() - полюса ПФ.
- полюса ПФ.
Как видим, M(p) и N(p) – приведенные многочлены.
zj находятся как корни M(p)=0; W(p)=0
si - находятся как корни N(p)=0; W(p)=
Если N и M не содержат общих множителей, то говорят, что zj и si - нули и полюса звена.
Определение. 1.Звено называется минимально-фазовым, если вещественные части всех его нулей и полюсов являются отрицательными или тождественно равными нулю.
2. Звено называется неминимально-фазовым, если оно содержит хотя бы один нуль или полюс с положительной вещественной частью.
Условие минимальной фазности:
Re Si≤0, , Re Zj≤0,
Неминимально-фазовые звенья, содержащие полюсы с положительной вещественной частью называются неустойчивыми звеньями.
Пример. Рассмотрим апериодическое
звено с ПФ:
![]() , Т>0
, Т>0
Следовательно, имеет полюс S1=-1/T <0 – минимально-фазовое звено.
Рассмотрим неустойчивое апериодическое
звено с ПФ:
![]() ;
;
S1=1/T >0 – неминимально-фазовое звено.
ЛАЧХ: L(w)=La(w) ; L(w) – неустойчивого, La(w) – апериодического.
ФЧХ: (w)=-[π+ a(w)], где а(w)=-arctg wT (1)
|
(w)|>|
a(w)|,
![]() ,
кроме
,
кроме
![]()
w
а(w)
(w)
-π
-π/2
0



К минимально-фазовому звену из множества звеньев с одинаковыми ЛАЧХ, относится 1 звено с ФЧХ (1)
Выражение для ФЧХ минимально-фазового звена по теореме Бодэ
(w)=![]() ,
(*)
,
(*)
где
![]() =lg
w.
=lg
w.
Из этого выражения следует, что для минимально-фазового звена:
можно найти (w) по L(w);
выражение (w) для ФЧХ при =lg w в основном определяется наклоном L(w), т.к.
 - малая величина.
- малая величина.
Условие минимальной фазности позволяет находить W(p) по L(w), и по W(p) находить (w), особенно просто по асимптотической ЛАЧХ.
Пример. Известна ЛАЧХ минимально-фазового звена. Надо найти W(p).
La
-20
w
0
5
20



Так как 20lgk=20, а следовательно, k=10; 1/T=5, поэтому T=0.2.
ПФ W(p)=10/(0.2p+1), т.к. звено минимально-фазовое. Отсюда ЛФЧХ
(w)=-arctg0.2w.
3. Описание сау
Математической моделью САУ является ДУ, связывающее управляемую величину и внешние воздействия.
Понятие о структурной схеме.
Систему можно описать с помощью уравнений связи и уравнений звеньев.
Пусть система включает N
звеньев и известны уравнения звеньев
системы в изображениях, представленные
в виде Yi(p)=Wi(p)Vi(p)
(1),
![]() ,
,
Yi(p) и Vi(p) – выходные и входные величины i-го звена, а Wi(p)=Yi(p)/Vi(p) – ПФ i-го звена.
В простейшем случае уравнение связи имеет вид: V2(p)=Y1(p) – вход 2гозвена равен выходу 1-го. Более сложный случай:
![]() (*)
(*)
В (*) V4(p)
– вход 4-го звена,
![]() - внешнее воздействие на вход 4-го звена,
Y1(p),
Y3(p),
Y5(p)
– выходные сигналы 1-го, 3-го, 5-го звеньев.
- внешнее воздействие на вход 4-го звена,
Y1(p),
Y3(p),
Y5(p)
– выходные сигналы 1-го, 3-го, 5-го звеньев.
В общем случае уравнение связи для i-го звена:
![]() ,
(2)
,
(2)
где
![]() - числовые коэффициенты, определяемые
как:
- числовые коэффициенты, определяемые
как:
 0,
если связь между
входом i-го
и выходом j-го
звена отсутствует
0,
если связь между
входом i-го
и выходом j-го
звена отсутствует
= 1, если связь между входом i-го и выходом j-го звена является положительной
-1, если связь между входом i-го и выходом j-го звена является отрицательной
Если =1 – то говорят, что i-ое звено охвачено положительной обратной связью (ПОС)
Если =-1 – то говорят, что i-ое звено охвачено отрицательной обратной связью (ООС)
Внешние воздействия: возмущающее
воздействие f(p),
шум наблюдения S(p),
V(p) – задающее
воздействие, например,
![]() .
.
Уравнения (1) и (2) дают полное описание САУ, но часто их дополняют уравнением для Y(p) – уравнением выхода, например, Y(p)=YN(p).
Определение. Графическое отображение уравнений звеньев (1) и уравнений связи (2) называется структурной схемой САУ (графическая модель системы).
Структурная схема включает в себя 3 элемента:
1) динамическое звено, отображает уравнение каждого звена, входящего в систему
Wi(p)
Vi(p)
Yi(p)

Это соответствует
Yi(p)=Wi(p)Vi(p),
Wi(p) – ПФ i-го звена
2) элемент суммирования: V3(p)=V1(p)±V2(p). Изображается кружком с перекрестием.
V2(p)
±
V1(p)
+
V3(p)


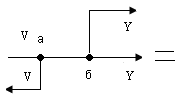
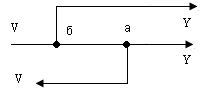
3) точка разветвления сигнала (точка съема)
«а» - точка съема
V
V
‘a’
y
Зная уравнения (1) и (2) можно построить
структурную схему. Но схема – не самоцель.
(1) и (2) – система алгебраических уравнений,
с помощью которой можно определить
любую переменную Yi(p),
через изображения внешних воздействий
![]() ,
,
![]() или
или
![]() ,
,
Для получения уравнения САУ используют преобразования структурных схем, т.е. соединения звеньев заменяют одним звеном с эквивалентной ПФ. Проводя несколько раз подобную операцию, приходят к простому соединению звеньев.
Правила преобразования схем.
1. Последовательное соединение - это соединение, при котором выходная величина каждого предыдущего звена является входом последующего. Рассмотрим соединение двух звеньев N=2: y1=W1V1; y2=W2V2 (3);
V=V1; y1=V2; y2=y. Найдем W – ПФ звена, эквивалентного последовательному соединению.
![]() ; W1=y1/V1; W2=y2/V2;
; W1=y1/V1; W2=y2/V2;
W1
W2
V=V1
y1=V2
y2=y
W=W1*W2
W=W1*W2*…*Wn=![]()
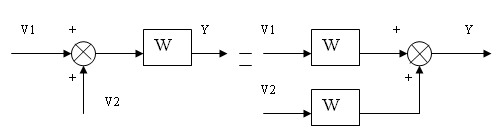
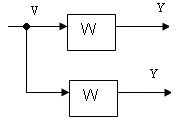
2. Параллельное соединение – входная величина поступает на несколько звеньев, а выходные сигналы суммируются.
Пусть 2 звена описываются уравнением (3), а уравнения связи V=V1=V2, уравнение выхода y=y1+y2.


ПФ: W=y/V=(y1+y2)/V=y1/V + y2/V=W1+W2
W=W1+W2
W=W1+W2+…+Wn=![]()
3. Соединение звеньев с ОС.
Пусть 2 звена описываются уравнением (3). Уравнение связи V1=V(±)y2;
V2=y1=y; (-) – ООС; (+) – ПОС
W1 – ПФ прямой связи, W2 – ПФ обратной связи.
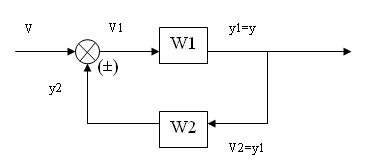
Если W2=1 - соединение звеньев с единичной ОС.

W – ПФ замкнутого контура.
Для получения ПФ разомкнутого контура разрывают ОС: получается последовательное соединение двух звеньев Wp=W1*W2 – ПФ разомкнутого контура.
4. Перемещение элементов суммирования.
а) на выход звена (по ходу сигнала)
y=W(V1+V2)=WV1+WV2
б) на вход звена
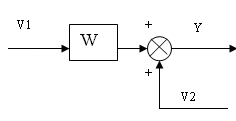

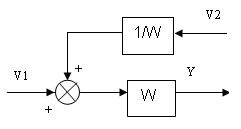
y=WV1+V2=W(V1+V2*1/W)
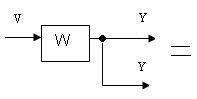
5. Перемещение точек съема.
а) на выход звена
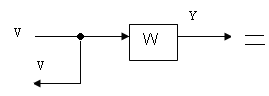
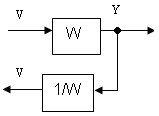
б) на вход звена
6. Перестановка элементов суммирования и точек съема
а) перестановка элементов суммирования
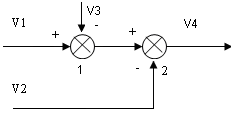
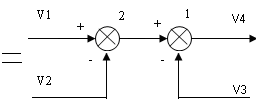
V4=(V1-V3)-V2=V1-V2-V3
б) перестановка точек съема
Алгоритм преобразования структурной схемы:
1) Развязать перекрещивающиеся контуры ОС (правила 4-6).
Рекомендация: как правило, переносят элементы суммирования против хода сигнала, а точки съема по ходу сигнала.
2) Заменить каждое из соединений звеньев одним звеном с эквивалентной ПФ (правило 1-3).
Пример: Трехконтурная структурная схема. Надо найти ПФ системы Ф=Y/V.

Переносим элемент суммирования 1 на вход звена W1, а затем меняем местами 1-ый и 2-ой элементы суммирования?
Переместим точку съема «а» на выход звена W4, а затем поменяем местами точки «а» и «б».
W8=W1*W2/(1+W1*W2*W5);
W9=W3*W4/(1+W3*W4*W6);
W10=W7/W1*W4
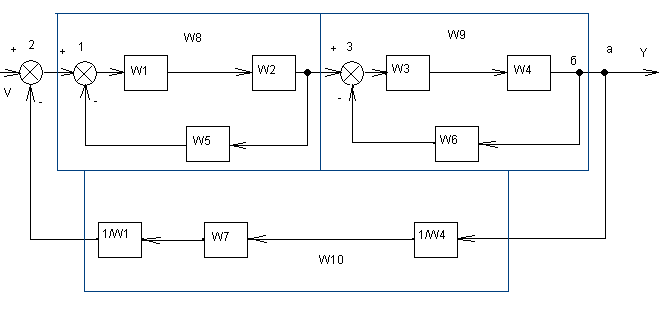
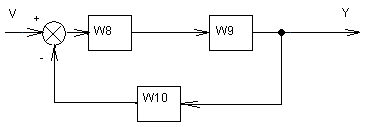
Ф=W8*W9/(1+W8*W9*W10)
Уравнения и ПФ одноконтурных САУ
1. Типовые структурные схемы замкнутой системы.
После преобразования структуры ОУ к одному звену выбирается закон управления, который определяет структурную схему системы управления. Рассмотрим типовые структурные схемы, соответствующие типовым законам управления.
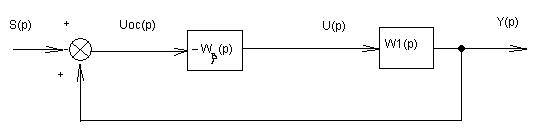
А) Управление с прямой и обратной связью
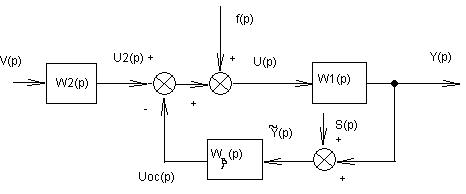
рис. 1 Типовая схема САУ с прямой и обратной схемой.
На этом рис. V(p)
– изображение по Лапласу задающего
воздействия V(t);
f(p) -
изображение по Лапласу возмущающего
воздействия f(t),
эквивалентного по своему влиянию
нескольким возмущающим воздействиям,
обычно действующим на САУ; S(p)
- изображение по Лапласу шума измерения
S(t);
![]() - изображение по Лапласу наблюдаемого
сигнала
;
Y(р) – изображение
управляемой величины Y(t),
причем обычно
=Y(t)+S(t);
U(p) –
изображение управляющего воздействия
(управления) V(t);
W1(p) – ПФ
ОУ.
- изображение по Лапласу наблюдаемого
сигнала
;
Y(р) – изображение
управляемой величины Y(t),
причем обычно
=Y(t)+S(t);
U(p) –
изображение управляющего воздействия
(управления) V(t);
W1(p) – ПФ
ОУ.
Если положить f=S=0, то получаем закон управления (в изображениях) с прямой и обратной связью:
U(p)=W2(p)V(p)-Wβ(p)Y(p),
описывающий работу управляющего устройства.
Здесь W2(p) – ПФ прямой связи (ПФ управляющего устройства по задающему воздействию), Wβ(p) – ПФ ОС (ПФ управляющего устройства по выходной, управляемой величине).
Эта структурная схема соответствует системе с неединичной обратной связью.
Б) Управление по ошибке
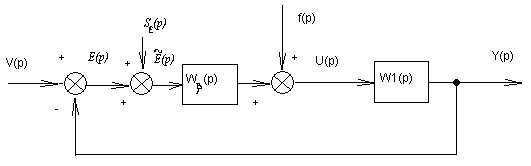
рис. 2
При этом структурная схема получается
из схемы (рис. 1) при W2(p)=
Wβ(p),
![]() .
Здесь
.
Здесь
![]() - изображение ошибки управления
- изображение ошибки управления
![]() .
На выходе датчика ошибки (сравнивающего
устройства) получаем сигнал ошибки
.
На выходе датчика ошибки (сравнивающего
устройства) получаем сигнал ошибки
![]() ,
,
где
![]() - изображение шума измерения ошибки
- изображение шума измерения ошибки
![]() .
Здесь закон управления (при
.
Здесь закон управления (при
![]() )
описывается выражением:
)
описывается выражением:
U(p)= Wβ(p)*
Такой закон называется законом управления по ошибке. Его удобно использовать тогда, когда не удается измерить задающее воздействие, а можно измерить разность V(t) и Y(t).
2. Передаточные функции замкнутой одноконтурной САУ.
На САУ влияет 3 внешних воздействия – задающее, возмущающее и шум измерения.
Поэтому различают 3 ПФ:
1) ПФ по задающему воздействию (ПФ замкнутой системы) – это отношение изображения по Лапласу управляемой величины предварительно невозбужденной системы к задающему воздействию в отсутствие других внешних воздействий.
Ф(р)=![]() (1)
(1)
При f=S=0 структурная схема (рис. 1) принимает вид
Используя правила преобразования структурных схем, находим ПФ по задающему воздействию.
![]()
ПФ разомкнутого контура ОС: Ф(р)=![]()
Для рис. 1 W(p)=W1(p)*Wβ(p) (*)
С учетом выражения (*) ПФ замкнутой системы по задающему воздействию можно записать так:
![]() (2)
(2)
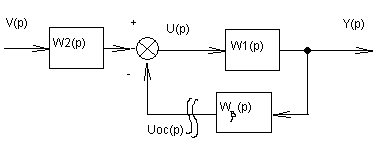
Структуру системы с единичной ОС, изображенной на рис. 2, при , легко преобразовать к виду, называемому структурой Блэка:
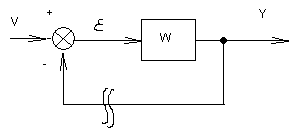
Здесь ПФ W определяется по (*) и называется ПФ разомкнутой системы. ПФ по задающему воздействию определяется в случае единичной обратной связи как
![]() (**)
(**)
и называется передаточной функцией замкнутой системы.
Как видим, в этом случае ПФ замкнутой системы полностью выражается через ПФ разомкнутой системы.
Реакцию системы на отдельно взятое задающее воздействие часто обозначают с индексом v, т.е. в виде
y(p)=yv(p).
2) ПФ по возмущающему воздействию (по возмущению) - это отношение изображения по Лапласу управляемой величины к возмущающему воздействию предварительно невозбужденной системы в отсутствие других внешних воздействий.
Согласно определения эта ПФ записывается так:
Фf(р)=![]() (3)
(3)
Выразим Фf(р) через ПФ ОС и ПФ ОУ. С этой целью преобразуем структурную схему (рис. 1) к другому виду, считая входом f(p) и учитывая, что V=S=0.
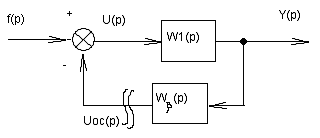
Также учитываем, что
U(p)=f(p)-Uoc(p)
Используя правило, относящееся к соединению звеньев с ОС, получаем
![]() (4)
(4)
где W(p) определяется по выражению (*).
ПФ по возмущению для системы с единичной ОС не отличается от выражения (4).
Реакция системы на отдельно взятое возмущающее воздействие обозначается с индексом f, т.е. как
y(p)=yf(p).
3) ПФ по шуму измерения - это отношение изображения по Лапласу управляемой величины к шуму измерения предварительно невозбужденной системы в отсутствие других внешних воздействий.
Формально ПФ по возмущению выглядит так:
Фs(р)=![]() (5)
(5)
Считая входом системы шум измерения и учитывая отсутствие других внешних воздействий, преобразуем структуру, представленную на рис. 1, к следующему виду:
Используя выражения для ПФ соединения
звеньев с положительной ОС, получаем
![]() или
или
![]() (6)
(6)
Для системы с единичной ОС ПФ по шуму
измерения ошибки Фsε(р)=![]() равняется ПФ замкнутой системы, т.е.
Фsε(р)=Ф(р).
равняется ПФ замкнутой системы, т.е.
Фsε(р)=Ф(р).
Реакция системы на отдельно взятый шум измерения обозначается как
y(p)=ys(p).
Стандартная форма представления ПФ разомкнутой системы (контура).
Wi(p)=Ki(p)/Di(p) – для i-го звена
ПФ разомкнутой системы W(p)=Y(p)/ε(p) вычисляется в результате алгебраических операций над ПФ звеньев, которые представляют собой отношение многочленов от р.
Следовательно, ПФ разомкнутой системы также можно представить в виде отношения двух многочленов W(p)=K(p)/D(p).
В теории управления принято представлять эту ПФ в стандартной форме, т.е. как
![]() ,
,
где
![]() - нормированная ПФ разомкнутой системы,
удовлетворяющая условию W0(0)=1;
ν – число интегрирующих
звеньев, входящих в ПФ. От числа
интегрирующих звеньев зависит точность
системы; k – коэффициент
усиления разомкнутой системы (контура),
определяемый выражением
- нормированная ПФ разомкнутой системы,
удовлетворяющая условию W0(0)=1;
ν – число интегрирующих
звеньев, входящих в ПФ. От числа
интегрирующих звеньев зависит точность
системы; k – коэффициент
усиления разомкнутой системы (контура),
определяемый выражением
![]()
Выясним физический смысл коэффициента усиления. Для этого используя выражение
![]()
найдем уравнение разомкнутой системы в изображениях.
![]()
Здесь
![]() представляет собой преобразование
Лапласа от ν-той производной
представляет собой преобразование
Лапласа от ν-той производной
![]() управляемой величины предварительно
невозбужденной системы.
управляемой величины предварительно
невозбужденной системы.
Пусть ошибка является постоянным
сигналом ε(t)=ε0=const,
так что ее изображение ε(р)= ε0/р.
При этом установившееся значение
![]() ν-ой производной
находим по теореме о конечном значении:
ν-ой производной
находим по теореме о конечном значении:
=![]()
Отсюда, коэффициент усиления разомкнутой системы представляет собой отношение установившегося значения ν-ой производной ее реакции и постоянного входного сигнала:
![]()
Размерность k=[c-ν]
Пример. Преобразуем ПФ
![]() к стандартному виду. Т.к. ν=1, то k=20с-1
и
к стандартному виду. Т.к. ν=1, то k=20с-1
и
![]()
Реакция замкнутой системы на внешние воздействия.
Рассмотрим следующую задачу.
Дано: Передаточные функции предварительно невозбужденной замкнутой системы Ф(р); Фf(p); Фs(p) и математические модели внешних воздействий V(t); f(t); S(t).
Требуется найти реакцию замкнутой системы y(t).
Используя принцип суперпозиции (принцип наложения), согласно которому реакция линейной системы на несколько внешних воздействий, приложенных в разные точки структурной схемы, равна сумме реакций на каждое из внешних воздействий, взятых в отдельности, искомую реакцию можем записать как
y(t)=yv(t)+yf(t)+ys(t).
Здесь yv(t), yf(t), ys(t) – соответственно реакции замкнутой системы на отдельно взятые в отдельности задающее воздействие v(t), возмущающее воздействие f(t) и шум измерения s(t). Отсюда преобразование Лапласа у(р) реакции y(t) равняется сумме преобразований Лапласа yv(р), yf(р), ys(р) реакций yv(t), yf(t), ys(t), т.е.
y(р)=yv(р)+yf(р)+ys(р).
В соответствии с (1), (3) и (5) преобразование реакции у(р)
У(р)=Ф(р)V(p)+Фf(р)f(p)+Фs(p)S(p) (7)
где ПФ замкнутой системы можно определить с помощью структурной схемы. Определяя обратное преобразование Лапласа от (7), находим y(t)=L-1[y(p)]. В частности, используя теорему об изображении интеграла свертки, получаем реакции
![]()
где k(t)=L-1[Ф(p)] – весовая функция замкнутой системы.
![]()
kf(t) – весовая функция по возмущающему воздействию.
![]()
ks(t) – весовая функция по шуму измерения.

Дифференциальные уравнения замкнутой системы.
ДУ системы – это уравнение, связывающее между собой y(t) c V(t), f(t), S(t). ДУ можно определить с помощью структурной схемы (рис. 1) по известным ПФ ее звеньев. Предположим, что найдены в виде отношения многочленов
![]() - ПФ ОУ
- ПФ ОУ
![]() - ПФ прямой связи
- ПФ прямой связи
![]() - ПФ ОС
- ПФ ОС
При этом
1+W(p)=1+![]()
где Д(р)=
![]() +
+![]() (8)
(8)
В соответствии с (2), ПФ по задающему воздействию
![]() (9)
(9)
В соответствии с (4) ПФ по возмущающему воздействию
![]() (10)
(10)
В соответствии с (6) ПФ по шуму измерения
![]() (11)
(11)
Если числители этих ПФ не содержат общих делителей со знаменателем Д(р), то Д(р) – характеристический многочлен замкнутой системы.
Пример.
![]() ;
Д(р)=
;
Д(р)=
![]() ,
а р+1≠Д(р)
,
а р+1≠Д(р)
Из (7) с учетом (9-11) после умножения на Д(р) получаем уравнение замкнутой системы в изображениях
Д(р)У(р)=К1(р)К2(р)V(р)+К1(р)D2(р)f(p)-К1(р)Кβ(р)S(p) (12)
Если правая часть равна нулю, то Д(р)У(р)=0 – характеристическое уравнение замкнутой автономной системы в изображениях. Заменяя в (12) изображения сигналов оригиналами и многочлены от р операторными многочленами, получаем дифференциальное уравнение замкнутой системы, записанное в операторной (символической) форме
Д(D)У(t)=К1(D)К2(D)V(t)+К1(D)D2(D)f(t)-К1(D)Кβ(D)S(t) (13)
D – оператор дифференцирования.
Пример. Пусть ПФ
![]() ,
,
![]() ,
, ![]()
S=0. В этом случае
K1(p)=k1;
K2(p)=k2(T2p+1);
![]() =k3(T3p+1);
D1(p)=T1p+1;
D2(p)=p
=k3(T3p+1);
D1(p)=T1p+1;
D2(p)=p
Согласно (8)
Д(р)= + =( T1p+1)р+ k1k3(T3p+1)=T1p2+(1+k1k3T3)p+k1k3
В соответствии с (12) и (13) находим уравнение замкнутой системы в изображениях
[T1p2+(1+k1k3T3)p+k1k3]Y(p)=k1k2(T2p+1)V(p)+k1pf(p)
в операторной форме
[T1D2+(1+k1k3T3)D+k1k3]y(t)=k1k2(T2D+1)V(t)+k1Df(t)
и в оригиналах
![]()