

3.2. Порядок выполнения работы
Нажатием пусковой кнопки "Пуск" запустить электродвигатель в работу.
При установившемся режиме работы электродвигателя замерить тахометром частоту вращения п0„ ротора.
Вычислить угловую скорость вращения ротора по формуле:
![]() о
о
Нажатием кнопки "Стоп" отключить электродвигатель от сети питания, запустив одновременно в работу секундомер.
Зафиксировать время свободного вращения ротора до полной остановки.
Определить по формуле (3.2) значение момента Мср сил сопротивления вращению ротора.
Действия, изложенные в п. 1, 2, 3, 4, 5 и 6, повторить три раза. Вычислить средние значения данных. Результаты занести в таблицу.
3.3. Содержание отчета
Номер и название работы.
Цель работы.
Схема к исследованию механических потерь в электродвигателе.
Результаты исследований по форме:
Номер опыта |
Частота вращения ротора п0, об/мин |
Угловая скорость ротора а>о, рад/с |
Время свободного вращения ротора, с |
Момент сопротивления Мср, Нм |
1 2 3 |
|
|
|
|
Сред, значен. |
|
|
|
|
5. Выводы.
3.4. Контрольные вопросы
По какой причине ротор останавливается через некоторое время после отключения электродвигателя от сети питания?
От чего зависит время свободного вращения ротора после отключения электродвигателя от сети питания?
Назовите составляющие механических потерь в электродвигателе.
Почему в правой части уравнения (3.1) значение момента представлено со знаком "-" ?
Какова зависимость момента сил сопротивления от частоты вращения ротора?
Какова зависимость времени свободного вращения ротора до полной остановки от его начальной угловой скорости ω0?
РАБОТА 4.
ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ ТЕЛ МЕТОДОМ МАЯТНИКОВЫХ КОЛЕБАНИЙ
Цель работы - изучить методику определения момента инерции тел по законам маятниковых колебаний.
4.1. Теоретическое обоснование работы
Пусть твердое тело подвешено на горизонтальной оси 0Z., не проходящей через его центр масс, как показано на рис. 4.1.
При отклонении от положения равновесия тело совершает
колебания под действием силы тяжести mg. Составим дифференциальное уравнение движения маятника:
Jz![]() = - mga
sinφ
= - mga
sinφ
где φ - угол отклонения тела от вертикали;
а - расстояние ОС от центра масс тела до оси подвеса;
Jz— момент инерции тела относительно оси OZ.
Деля обе части равенства на Jz и вводя обозначение
mga/Jz=K2, (4.1)
найдем дифференциальное уравнение колебаний тела в виде: ' +К2 sinφ=0
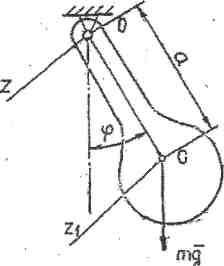
Рис. 4.1. Схема к исследованию маятниковых колебаний тела.
Полученное дифференциальное уравнение нелинейное, в обычных функциях не интегрируется. Поэтому ограничимся рассмотрением малых колебаний тела, считая угол φ малым и полагая sinφ ≈ φ. Тогда предыдущее уравнение примет вид:
+К2φ=0.
Решение этого уравнения ищем в виде: φ=cjsinkt + C2Coskt.
Полагая, что в начальный момент t=0 маятник отклонен на малый угол φ=φ0 и отпущен без начальной скорости (φ0= 0) ???, найдем для постоянных интегрирования c1=0 и c2=φо- Тогда закон малых колебаний маятника при данных начальных условиях будет
φ= φ0 coskt.
Следовательно, малые колебания тела являются гармоническими. Период колебаний его, если заменить К значением из вы-ражения(4.1), определяется формулой:
T
= 2π![]() (4.2)
(4.2)
Откуда момент инерции тела
![]() (4-3)
(4-3)
Используя формулу (4.2), можно также определить период колебаний соответствующего математического маятника. Для математического маятника, состоящего из одной материальной точки, справедливы равенства:
Jz= m1l2,α =l,m=m1
где -l - длина математического маятника; m1 - масса математического маятника.
Подставляя эти величины в равенство(4.2), найдем, что период малых колебаний математического маятника определяется формулой:
![]()
Если исследуемое тело и соответствующий ему математический маятник будут совершать колебания с равными периодами, то справедливо равенство:
![]()
Откуда
Jz = mla. (4.4) Таким образом, зная массу m тела, расстояние от оси подвеса
до его центра масс, длину -С соответствующего математического маятника, совершающего синхронные колебания с ним, можно определить момент инерции данного тела относительно оси подвеса по формуле (4.4).
Далее, момент инерции тела относительно оси OZh проходящей через его центр масс параллельно оси 02 , можно рассчитать, используя теорему Гюйгенса, т. е. по формуле:
J1 =J2- та2. (4.5)