

2.2. Описание лабораторной установки
Установка (рис. 2.2) состоит из основания 1, двух шкивов 2, установленных на одинаковой высоте на стойках 3.

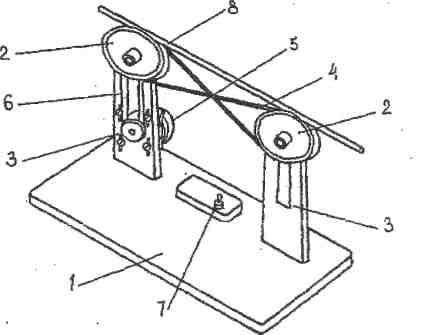
Рис. 2.2. Установка для определения коэффициента трения скольжения между различными материалами.
В данной установке шкивы, кинематически связанные между собой перекрестной ременной передачей 4, получают вращение в противоположных направлениях от синхронного электродвигателя 5 через ременную передачу 6. Включение электродвигателя в работу осуществляется тумблером 7.
В комплект установки входят также однородные стержни 8, выполненные из разного материала. Стержень 8, установленный на вращающихся навстречу друг другу шкивах с начальным смещением влево или вправо от середины между их осями, совершает гармонические колебания. Период колебаний зависит от коэффициента трения скольжения между стержнем и шкивами.
2.3. Порядок выполнения работы
Положить стержень №1 на шкивы 2, сместив от середины между осями шкивов на величину Х0= 60...100 мм (см. рис. 2.1).
Включить установку в работу тумблером 7.
3. Замерить секундомером время пяти полных колебаний стержня. Опыт повторить 3 раза.
Сказанное в п. 1, 2, 3 повторить для стержня №2.
Результаты опытов занести в таблицу для подсчета периода колебаний стержней №1 и №2.
Вычислить по формуле (2.7) коэффициенты трения скольжения стержней по поверхности шкивов.
2.4. Содержание отчета
Номер и название работы.
Цель работы.
Схема к определению коэффициента трения скольжения
между стержнем и шкивами.
4. Результаты исследований по форме:
Номер опыта |
Время пяти полных колебаний tt, с |
Период колебаний Тi = τi / 5, с |
|
Стержень №1 |
I |
|
|
2 |
|
|
|
3 |
|
|
|
Среднее
значение
|
|
||
Стержень №2 |
I |
|
|
2 |
|
|
|
3 |
|
|
|
Среднее значение |
|
||
Определение коэффициентов трения скольжения стержня по поверхности шкивов по формуле (2.7).
Выводы.
2.5. Контрольные вопросы.
Объясните причину гармонических колебаний стержня.
От каких факторов зависит период колебаний стержня?
От чего зависит амплитуда колебаний?
Оказывает ли влияние частота вращения шкивов на период колебаний стержня?
Грани стержня выполнены из разного материала. Произойдет ли изменение периода и амплитуды колебаний, если стержень перевернуть на другую грань?
РАБОТА 3.
ИССЛЕДОВАНИЕ МЕХАНИЧЕСКИХ ПОТЕРЬ В ЭЛЕКТРОДВИГАТЕЛЕ.
Цель работы - определение среднего значения момента сил сопротивления вращению ротора электродвигателя.
3.1. Теоретическое обоснование работы
Процесс преобразования электрической энергии в механическую сопровождается потерями. В них существенную долю составляет механическая часть потерь.
Исследуем механические потери в асинхронном электродвигателе с короткозамкнутым ротором, расположенным горизонтально.
Ниже приведены технические данные электродвигателя, необходимые для исследований.
Технические данные лабораторной установки
1. Тип электродвигателя - асинхронный с короткозамкнутым ротором.
2. Момент инерции ротора Jx . кг-м2 0,0017
3. Угловая скорость вращения ротора ω0 , рад/с 104,5
При подключении электродвигателя к сети питания возникает движущий момент в роторе. В результате ротор начинает вращаться. Через некоторое время угловая скорость стабилизируется, становится равной с со0.
При отключении электродвигателя от сети питания ротор продолжает вращаться по инерции. Однако из-за механических потерь угловая скорость вращения ротора постепенно падает, и через определенное время он останавливается. При этом механические потери складываются из момента трения в опорах и момента сил сопротивления воздуха при вращении ротора (рис. 3.1).

Рис 3.1. Схема к исследованию механических потерь в электродвигателе .
Момент трения в опорах ротора является постоянной величиной, зависящей от сил реакции и коэффициента трения в опорах, т. е. определяется по формуле:
![]()
Гдеf1, f2 - условные коэффициенты трения в подшипниках;
R1, R2 - реакции опор;
db d2 - диаметры цапф ротора под подшипники (часто принимают оба подшипника одинаковыми).
Момент сил сопротивления воздуха пропорционален угловой скорости вращения ротора, т. е. определяется по формуле:
Мв =μω
где μ. - коэффициент сопротивления воздуха при вращении ротора;
ω - угловая скорость вращения ротора.
Момент сил сопротивления воздуха определяется теоретически с невысокой точностью, так как большие трудности возникают в определении коэффициента сопротивления воздуха μ. Поэтому для практической оценки механических потерь в электродвигателе ограничимся определением среднего значения момента МСр сил сопротивления вращению ротора электродвигателя.
Рассмотрим вращательное движение ротора после отключения от сети питания электродвигателя. При этом движение ротора можно описать дифференциальным уравнением вида:
![]() (3.1)
(3.1)
где Jx - момент инерции ротора;
со - текущее значение угловой скорости ротора. Разделяя переменные, взяв от обеих частей равенства соответствующие интегралы, получим:
где ω0 - угловая скорость вращения ротора в момент отключения электродвигателя от сети питания;
t - время свободного вращения ротора до полной остановки. Откуда после преобразований
![]() (3.2)
(3.2)