

7.1. Теоретическое обоснование работы
При отводе маятника на угол φ0 (рис. 7.1) от положения устойчивого равновесия совершаются колебательные движения. Рассмотрим маятник в произвольном положении, определяемом утлом φ. Проводим оси координат ОХУ так, чтобы ось ОХ была перпендикулярна оси маятника, а ось ОУ направлена вдоль линии ОВ (рис. 7.1).
Изобразим действующую на маятник силу тяжести Р, реакции опор Х0 и У0 (силой тяжести стержня маятника пренебрегаем).

Рис 7.1. Схема к исследованию динамических реакций опоры.
Присоединим к ним силы инерции маятника, приведя их к центру О . Силы инерции представлены двумя составляющими
![]() и
и
![]() ,
а. также
парой с моментом М0.
Модули их
имеют значения:
,
а. также
парой с моментом М0.
Модули их
имеют значения:
![]() (7.1)
(7.1)
![]() (7.2)
(7.2)
![]() (7.3)
(7.3)
где l - длина стержня маятника (l = ОВ);
ω,
ε
- угловая
скорость и угловое ускорение
маятника.
Составляя для этой плоской
системы сил уравнения равновесия
![]() и
и
![]() получим:
x0-psinφ
+
= 0, (7.4)
получим:
x0-psinφ
+
= 0, (7.4)
y0-pcosφ-R![]() =0, (7.5)
=0, (7.5)
![]() (7.6)
(7.6)
Отсюда реакции опоры
x0-psinφ
-R![]() =0, (7.7)
=0, (7.7)
y0-pcosφ+ Run=0. (7.8)
В выражениях (7.7) и (7.8) составляющие р sinφ и pcosφ
являются проекциями статической реакции, а и - проекциями динамической реакции. Как видно из выражений (7.1) и (7.2) проекции динамической реакции зависят от угловой скорости ω, углового ускорения е маятника.
Для определения угловой скорости маятника в произвольном положении воспользуемся теоремой об изменении кинетической энергии. Учитывая, что при ω = ω0 кинетическая энергия маятника Т0 = 0, получим:
![]()
Откуда, приняв J0=pl2 /g, находим:
ω2
= 2g(cos φ
- cos φ0)/l
. Угловое
ускорение s
получим из
выражения (7.6), предварительно заменив
![]() его выражением (7.3), т. е. по формуле:
его выражением (7.3), т. е. по формуле:
е = gsinφ/l
При найденных значениях ε и ω2 равенства (7.1) и (7.2) примут вид:
R = р sinφ ,
Run = 2_p(cosφ - cosφ0)
Тогда модуль динамической реакции определяется по Формуле:
![]() (7.9)
(7.9)
Как видно из выражения (7.9), динамическая реакция является величиной переменной. В момент, когда маятник проходит положение устойчивого равновесия (φ = 0) динамическая реакция примет максимальное значение, т. е. выражение (7.9) представится в виде:
Rg = 2р (1- cos φ0)
7.2. Описание лабораторной установки
Установка (рис. 7.2) представляет собой конструкцию в виде маятника 1 с опорой 2, закрепленной жёстко на плоской пружине 3. Пружина 3 одним концом заделана консольно, а другим концом свободно опирается на упор. Над пружиной установлен на кронштейне индикатор 4, шток которого упирается на нее в зоне расположения оси опоры 2.
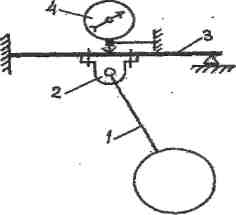
Рис 7.2. Лабораторная установка для исследования динамических реакций опор.
Принцип работы установки следующий. При колебательном движении маятника в опоре возникает, кроме статической реакции, динамическая реакция, под действием которой пружина прогибается дополнительно. При этом наибольшее значение прогиба пружины будет тогда, когда маятник проходит положение устойчивого равновесия, т. е. когда динамическая реакция примет максимальное значение.
Для того, чтобы фиксировать прогиб пружины только от динамической реакции, индикатор следует настроить на "ноль" при покоящемся маятнике в положении устойчивого равновесия.