

7.3. Порядок выполнения работы
Настроить индикатор на "ноль" при покоящемся маятнике в положении устойчивого равновесия.
Оттарировать пружину. Для этого последовательно подвешивать к маятнику грузы массой 0,5 , 1 , 1,5 кг. В каждом случае фиксировать показания индикатора и определять силу тяжести груза в Н по формуле pr = mg ( здесь т- масса груза, g - ускорение свободного падения). По полученным данным построить та-рировочный график зависимости показаний индикатора от приложенных сил тяжести п =f(pr)-
Отвести маятник на угол (р0 = 15° от положения устойчивого равновесия и дать маятнику возможность совершать свободные колебания. В процессе колебаний зафиксировать наибольшее отклонение стрелки индикатора и определить величину соответствующей ему динамической реакции tfg по тарировочному графику.
Сказанное в п. 3 повторить при отклонениях маятника на угол φ0 = 25°, φ0 = 35°и φ0 = 45°. Данные занести в таблицу.
При заданных значениях φ0 = 15°, φ0 = 25°, φ0 = 35° и φ0 = 45° вычислить теоретические значения динамической реакции Rg по формуле (7.10).Результаты занести в таблицу и сравнить с экспериментальными значениями динамической реакции Rg.
Определить относительное расхождение опытных данных от теоретических в процентах по формуле:
![]() %
%
7.4. Содержание отчета
Номер и название работы. •
Цель работы.
Схема лабораторной установки для исследования динами-
ческой реакции опоры (рис. 7.2).
Тарировочный график п =f(pr).
Результаты исследований по форме:
Номер опыта |
Начальный угол отклонения маятника сро |
Показание индикаторам |
Значение динамической реакции, Н |
относительное расхождение опытных данных от теоретических 5, % |
|
экспериментальное Кg |
теоретическое |
||||
1 2 3 4 |
15° 25° 35° 45° |
|
|
|
|
6. Выводы.
7.5. Контрольные вопросы
От каких величин зависит динамическая реакция ?
В каком положении маятника динамическая реакция опоры максимальна ? Почему ?
Почему динамическая реакция опоры возрастает с увеличением размаха колебаний ?
Зависит ли динамическая реакция опоры от длины стержня маятника ?
Когда динамическая реакция опоры равна 0 ?
РАБОТА 8.
ИССЛЕДОВАНИЕ СВОБОДНЫХ КОЛЕБАНИИ МАТЕРИАЛЬНОЙ ТОЧКИ
Цель работы - экспериментально проверить теорию свободных колебаний точки.
8.1. Теоретическое обоснование работы
Исследуем колебательное движение тела (материальной точки ), подвешенного на пружине, как показано на рис. 8.1,.
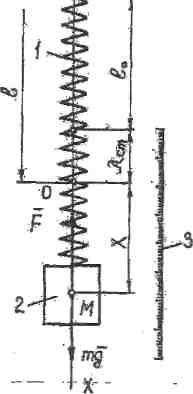
Рис. 8.1. Схема к исследованию свободных колебаний материальной точки.
На материальную точку М массы в любом промежуточном положении действуют сила тяжести mg и сила упругости пружины F , Проекция силы F на ось ОХ согласно закону Гука
Fx=c(Xcm+x)
где с - жесткость пружины;
![]() - деформация пружины
под действием силы тяжести тела в
положении равновесия;
- деформация пружины
под действием силы тяжести тела в
положении равновесия;
х - координата материальной точки в промежуточном положении.
Найдем закон движения материальной точки М. Составляя дифференциальное уравнение движения в проекции на ось ОХ, получим
mх=mg-с( +х)-
Учитывая mg = c уравнение (8.1) представим в виде:
![]()
Деля
обе части равенства на т
и
вводя обозначение
с/т
= к![]() , (8.2)
, (8.2)
окончательно получим:
х + к х = 0-
Уравнение (8.3) представляет собой дифференциальное уравнение свободных колебаний точки. Решение этого линейного однородного дифференциального уравнения второго порядка ищем в виде х = ent. Полагая в уравнении (8.3) х = еп', получим для определения п характеристическое уравнение п2 +-к2 = 0 . Поскольку корни этого уравнения являются чисто мнимыми (n1,2 = ±ik), то, как известно из теории дифференциальных уравнений, общее решение уравнения (8.3) имеет вид:
х = c1 sinkt + с2 coskt,
где c1 и сг - постоянные интегрирования.
Если вместо постоянных c1 и с2 ввести постоянные А я а, такие, что с = Acos а, с2 = Asin а, то получим
x=Asin(Kt+a) (8.4)
(здесь А - амплитуда гармонических колебаний, а - начальная фаза).
Продифференцировав уравнение (8.4), получим скорость точки в рассматриваемом движении:
vx = Ak cos (Kt+ a) (8.5)
Параметры колебаний А и а определяются по начальным условиям. При t = 0 х = х0, х = v0. Тогда
x0 = Asina (8.6)
![]() =
Akcos
a, (8.7)
=
Akcos
a, (8.7)
Решая совместно выражения (8.6) и (8.7), находим:
A=![]() (8.8)
(8.8)
α=arctg![]() . (8.9)
. (8.9)
Промежуток времени Т , в течение которого точка совершает одно полное колебание, называется периодом колебаний. По истечении периода колебаний фаза меняется на 2л. Следовательно, должно быть кТ= 2х, откуда
Т
= 2π![]() , (8.10)
, (8.10)
к = 2π/Т (8.11)
Анализируя выражения (8.8), (8.9) и (8.10), приходим к выводу, что амплитуда колебаний А к начальная фаза а зависят от состояния системы в начальный момент, период колебаний зависит от массы тела m и от жесткости пружины с. На период колебаний не влияют ни амплитуда, ни начальные условия.
Из выражения (8.10) можно вычислить жесткость пружины, т. е.
с = 4тπ:2/Т2 (8.12)
Жесткость пружины можно определить также, измерив вели чину растяжения пружины в состоянии статического равновесия под действием силы тяжести груза, т. е. из соотношения: c = 4m/.λст (8.13)