

8.2. Описание лабораторной установки
Лабораторная установка для исследования свободных колебаний тела включает пружину 1 с грузом 2, подвешенную на консоли с возможностью совершать по вертикали свободные колебания, шкалу 3, закрепленную на стене вертикально (см. рис. 8.1).
Для приведения системы в колебательное движение необходимо затянуть груз 2 вниз и отпустить его без начальной скорости. Далее по шкале 3 можно фиксировать положения груза в любой момент времени.
Порядок выполнения работы
Подвесить к пружине исследуемый груз (масса указана на нем).
Определить по шкале статическое удлинение lcm пружины
Определить жесткость пружины по формуле (8.13).
Отклонить груз от положения равновесия на расстояние х0
(х0 брать от 30 до 100 мм).
Замерить амплитуду колебаний груза (точки М), как половину размаха колебаний.
Замерить при помощи секундомера время 10 полных колебаний.
Действия, изложенные в п. 4, 5, 6, повторить три раза. Результаты исследований занести в таблицу для вычисления периода колебаний.
Вычислить период колебаний системы по формуле (8.10) и сравнить с опытным значением.
Вычислить круговую частоту колебаний по формуле (8.11).
Определить начальную фазу а по формуле (8.9).
Найти закон движения точки М, подставив полученные значения А , к и а в уравнение (8.4).
Построить график зависимости х = f(t) по найденному за кону движения точки М.
8.4. Содержание отчета
Номер и название работы.
Цель работы.
Схема к исследованию свободных колебаний материальной точки.
Результаты исследований по форме:
статическое удлинение λс= м;
амплитуда колебаний А = м;
жесткость пружины с = Н/м;
круговая частота колебаний к = с";
начальная фаза колебаний а = рад.
Номер опыта |
Время десяти полных колебаний tt. с |
Период колебаний Т, = t/10, с |
1 2 3 |
|
|
Среднее значение |
|
|
5. График зависимости х =f(t).
6. Выводы.
8.5. Контрольные вопросы
Какие колебания называются свободными ?
Какими параметрами характеризуются свободные колебания ?
Что такое жесткость пружины и какими методами ее можно определять ?
Что называется амплитудой колебаний и от каких величин она зависит ?
Что называется периодом колебаний и от каких величин он зависит ?
Зависит ли период колебаний от амплитуды ?
РАБОТА 9.
ИССЛЕДОВАНИЕ ВЫНУЖДЕННЫХ КОЛЕБАНИЙ МАТЕРИАЛЬНОЙ ТОЧКИ
Цель работы - экспериментально проверить теорию вынужденных колебаний точки.
9.1. Теоретическое обоснование работы
Исследуем вынужденные колебания тела (материальной точки ) массы т , подвешенного на пружине с коэффициентом жесткости с (рис. 9.1).
Пусть верхний конец Д пружины совершает вертикальные колебания по закону:
ξ = r sinpt (9.1)
где р - частота вынужденных колебаний;
r - амплитуда вынужденных колебаний.
Поместим начало координат О в положение статического равновесия груза и направим ось ОХ по вертикали вниз. Если обозначить длину недеформированной пружины l0, то ее длина в произвольный момент времени будет
![]()
а удлинение
![]()
Тогда действующая на тело сила упругости
![]()
Рис.
9.1. Схема к исследованию вынужденных
колебаний
материальной точки.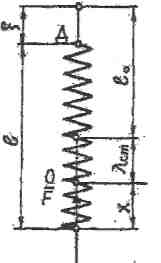
|
тх = -с(λс+ x-ξ)+mg
Отсюда, учитывая то, что mg = с λс вводя обозначение с/т = к2, после преобразований получим:
x + k2x~ кξ,
Или с учетом (9.1)
х + к2х = k2r sin pt
Далее, вводя обозначение к2 r = р0, будем иметь
x + k2x = p0 sin pt
Решение данного дифференциального уравнения будет иметь окончательный вид:
х
= A sin
(kt
+ а)+
2
Ро
2
sin
pt
? (9.2)
где Ana- постоянные интегрирования, определяемые по начальным условиям.
Решение (9.2) показывает, что колебания тела слагаются из собственных колебаний с амплитудой А, частотой к и колебаний с амплитудой Б = р0 / (к2 - р2) , частотой р, называемых вынужденными колебаниями.
Практически, благодаря неизбежному наличию тех или иных сопротивлений, собственные колебания будут постепенно затухать. Поэтому в уравнении (9.2) основное место будет иметь составляющая вынужденных колебаний. Амплитуду этих колебаний можно представить в виде:
![]()
Как видим, амплитуда Б зависит от отношения частоты p возмущающей силы к частоте собственных колебаний к. Если р«к (верхний конец пружины колеблется очень медленно), то В≈r. При р = к наступит резонанс и размах колебаний сильно возрастает. Если частота р станет больше к, то амплитуда колебаний также уменьшается. Наконец, когда р»к амплитуда В≈0.
Для графического представления данной зависимости введем обозначения:
z=plk (9.4)
η= Blr (9.5)
Безразмерный коэффициент ц называем коэффициентом динамичности. С учетом обозначений (9.4) и (9.5) выражение (9.3) примет вид:
![]() (9.6)
(9.6)
Частоту собственных колебаний к тела в выражении (9.4) можно найти из принятого обозначения к2 = с/т с учетом равенства mg = cλс. т.е. по формуле:
![]() ■ (9.7)
■ (9.7)
Частота собственных колебаний к тела может быть найдена также, зная период колебаний Т, по истечении которого фаза колебаний изменится на 2л, т. е. из соотношения:
к = 2π/Т (9.8)