

1.2. Порядок выполнения работы
Предметом исследования является пластина, вырезанная из тонкого стального листа. Пластина имеет вырез (рис. 1.3), скомбинирована из фигур правильной геометрической формы. Для определения координат центра тяжести пластины провести следующие работы.
Условно разбить пластину карандашом и линейкой на отдельные фигуры правильной геометрической формы, для каждой из которых положение центра тяжести известно или легко можно вычислить.
Разместить заданную пластину в системе координат так, чтобы удобно было определять координаты центров тяжести ее частей.
Найти координаты центров тяжести каждой из фигур и вычислить их площади. При этом площадь, соответствующую вырезанной части тела, считать отрицательной. При определении
координат центров тяжести фигур использовать справочные источники.
190

Рис. 1.3. Эскиз пластины для определения центра тяжести.
Результаты занести в таблицу и вычислить координаты центра тяжести пластины по формулам (1.3).
Найденное положение центра тяжести отметить на пластине соответствующим знаком.
Подвешивать тело на нити за различные его точки (для этого предусмотрены на пластине отверстия). Отметить карандашом и линейкой направление нити на пластине после каждого подвешивания и найти точку пересечения линий по этим направлениям.
Разместить заново пластину в системе координат так, как было в п. 2, и определить координаты точки пересечения линий по направлениям нити.
Вычислить погрешности опыта по формулам (1.4).
1.3. Содержание отчета
Номер и название работы.
Цель работы.
3.Эскиз пластины и схема ее разбивки на части для определения координат центра тяжести.
4. Результаты замеров и вычислений по форме:
Номера частей пластины |
Координаты, мм |
Площади частей пластины SK, мм2 |
|
хк |
YK |
||
|
|
|
|
5. Определение координат центра тяжести пластины по фор-
муле (1.3).
Вычисление погрешности опыта по формулам (1.4).
Выводы.
1.4. Контрольные вопросы
Что называется центром тяжести твердого тела?
От чего зависит положение центра тяжести однородного тела?
Зависит ли положение центра тяжести тела малых размеров от места нахождения в пространстве вблизи земной поверхности?
Может ли находиться центр тяжести вне пределов данного тела?
Правомерно ли использование формул (1.2) и (1.3) для определения центра тяжести неоднородных твердых тел?
РАБОТА.2.
ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТА ТРЕНИЯ СКОЛЬЖЕНИЯ
Цель работы - изучить методику определения коэффициента трения скольжения между
различными материалами.
2.1. Теоретическое обоснование работы
Рассмотрим стержень массы т, установленный на вращающихся шкивах. На стержень действуют сила тяжести G = mg, реакции связей N1 и N2 , а также силы трения F1=fN1 и F2 = fN2 (рис. 2.1). Здесь f- динамический коэффициент трения скольжения между стержнем и плитами.
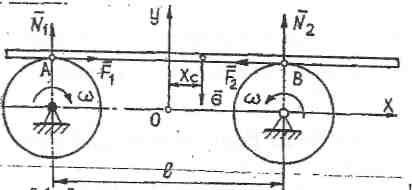
Рис. 2.1. Схема к определению коэффициента трения скольжения между
стержнем и шкивами.
Точку О , являющуюся серединой расстояния между осями шкивов, примем
за начало системы координат. Используя теорему о движении центра масс, составим
дифференциальное уравнение движения стержня в проекциях на ось ОХ в указанной системе
координат:
mXc=fN1-fN2t (2.1)
где Хс- координата центра тяжести стержня.
Находим силы реакции связей N1 и N2 следующих уравнений равновесия стержня:
![]()
![]()
где l - расстояние между центрами шкивов. То есть
![]()
![]()
Подставив значения N1 и N2 в уравнение (2.1), после преобразований получим:
![]() (2.2)
(2.2)
Сократив обе части равенства на т и вводя обозначениеK2 = 2fg./l, приведем уравнение (2.2) к виду:
Хс+К2Хс=0 (2.3)
Как известно, общее решение этого дифференциального уравнения имеет вид:
Хс = С1 sin kt + cos kt,
где С1 и С2 - постоянные интегрирования.
Если вместо постоянных C1 и С2 ввести постоянные А и α такие, что
С] = A cos а, С2 = A sin а, то получим:
Хc = .A (sin kt • cos a + cos kt• sin a)
Или
Xc = A sin(kt + a) (2.4)
Дифференцируя это выражение по времени, получим:
Хс = Ak cos(kt + a) (2.5)
Так как стержень начинает свое движение из состояния покоя при начальном смещении центра тяжести С от начала координат на величину Х0, то начальными условиями для уравнений (2.4) и (2.5) являются:
t = 0,Xc = Xo,Xc = 0.
С учетом этих начальных условий из уравнений (2.4) и (2.5) получим:
Asinα = X0,
Akcosα= 0. Откуда α=π/2, А= Х0.
Тогда уравнение (2.4) примет конечный вид:
Xc = X0coskt. (2.6)
Уравнение (2.6) представляет, собой уравнение гармонического колебания стержня. Период колебаний его определяется по формуле:
![]()
![]()
(2.7)
Или с учетом
![]() получим:
получим:
![]()
Таким образом, зная период колебании стержня, расстояние между шкивами, можно определить коэффициент трения скольжения между материалами стержня и шкивов.