

2.2.3. Скорость точки при естественном способе задания движения
Пусть в момент
![]() точка занимала положение М, а в
момент
точка занимала положение М, а в
момент
![]() – положение М1 (рис. 2.9).
Дуговые координаты этих точек будут
соответственно равны:
– положение М1 (рис. 2.9).
Дуговые координаты этих точек будут
соответственно равны:
![]() ;
;
![]() ,
,
г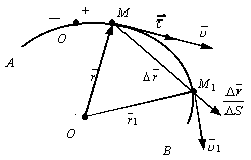 де
де
![]() .
.
Проведем из произвольного центра О, радиус – вектор . Тогда по формуле (2.7)
![]() .
.
Рис.
2.9 Введем в это выражение
![]() ,
тогда
,
тогда
![]() .
.
Здесь вектор
![]() и направлен также как вектор
.
При ΔS→0 его направление
стремиться к направлению касательной,
проведенной в точке М в сторону
увеличения дуговой координаты. А модуль
и направлен также как вектор
.
При ΔS→0 его направление
стремиться к направлению касательной,
проведенной в точке М в сторону
увеличения дуговой координаты. А модуль
![]() стремится к 1, то есть вектор
стремится к 1, то есть вектор
![]() направлен по касательной к кривой в
сторону увеличения дуговой координаты
и по модулю равен единице. Обозначим
его ортом
направлен по касательной к кривой в
сторону увеличения дуговой координаты
и по модулю равен единице. Обозначим
его ортом
![]() .
Тогда:
.
Тогда:
![]() ,
(2.11)
,
(2.11)
где
![]() – скалярная величина, представляющая
собой проекцию вектора скорости точки
на касательную к ее траектории и
называется алгебраической скоростью
точки.
– скалярная величина, представляющая
собой проекцию вектора скорости точки
на касательную к ее траектории и
называется алгебраической скоростью
точки.
![]() .
(2.12)
.
(2.12)
То есть модуль скорости равен абсолютному значению производной от дуговой координаты по времени.
Знак скорости v указывает направление движения точки по траектории. Если
 ,
то функция S(t)
убывает и направление скорости
противоположно направлению касательного
орта
.
,
то функция S(t)
убывает и направление скорости
противоположно направлению касательного
орта
. ,
то функция S(t)
возрастает, то есть точка движется в
сторону возрастания дуговой координаты
S(t)
и направление скорости
совпадает с направлением касательного
орта
.
,
то функция S(t)
возрастает, то есть точка движется в
сторону возрастания дуговой координаты
S(t)
и направление скорости
совпадает с направлением касательного
орта
. и изменяет знак,
то дуговая координата S(t)
в этот момент времени достигает
максимального или минимального значения,
а точка меняет свое направление движения.
и изменяет знак,
то дуговая координата S(t)
в этот момент времени достигает
максимального или минимального значения,
а точка меняет свое направление движения.
2. 3. Ускорение точки
2.3.1. Ускорение точки при векторном способе задания движения.
Ускорение при криволинейном движении характеризует изменение модуля и направления скорости точки с течением времени.
Пусть в некоторый
момент времени t
движущаяся точка находится в положении
М и имеет скорость
,
а в момент
![]() приходит в положение М1 и имеет
скорость
приходит в положение М1 и имеет
скорость
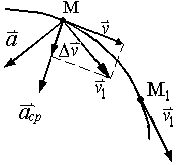
![]() (рис. 2.10). Тогда за промежуток времени
(рис. 2.10). Тогда за промежуток времени
![]() скорость получает приращение
скорость получает приращение
![]() .
.
Для построения
вектора
![]() отложим от точки М вектор
отложим от точки М вектор
![]() и построим параллелограмм, в котором
диагональю будет
,
тогда вторая сторона параллелограмма
изображает вектор
и построим параллелограмм, в котором
диагональю будет
,
тогда вторая сторона параллелограмма
изображает вектор
![]() .
Заметим, что вектор
всегда направлен в сторону вогнутости
кривой.
.
Заметим, что вектор
всегда направлен в сторону вогнутости
кривой.
Отношение
приращения вектора скорости к
соответствующему промежутку времени
![]() определяет вектор среднего
ускорения точки за этот промежуток
времени:
определяет вектор среднего
ускорения точки за этот промежуток
времени:
![]() .
(2.13)
.
(2.13)
Вектор среднего ускорения, очевидно, имеет тоже направление, что и вектор , т.е. направлен в сторону вогнутости траектории.
Ускорением
точки в данный момент времени
![]()
называется
векторная величина
![]() ,
к которой стремится среднее ускорение
,
к которой стремится среднее ускорение
![]() при стремлении Δt→0,
при стремлении Δt→0,
![]()
 ,
,
или
![]() (2.14) Следовательно,
вектор ускорения точки в данный
момент времени
(2.14) Следовательно,
вектор ускорения точки в данный
момент времени
Рис. 2.10 равен первой производной от вектора скорости или второй производной от радиус-вектора точки по времени.
Если траектория точки плоская кривая, то вектор ускорения лежит в плоскости этой кривой и направлен в сторону вогнутости.
Е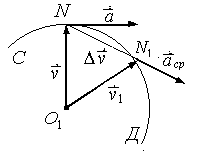 сли
траектория точки – пространственная
кривая, то вектор
направлен в сторону вогнутости кривой.
Вектор
сли
траектория точки – пространственная
кривая, то вектор
направлен в сторону вогнутости кривой.
Вектор
![]() расположен в плоскости, проходящей
через касательную к траектории в точке
М и прямую, параллельную касательной
в соседней точке М1. В пределе,
когда точка М1 стремиться к
точке М, эта плоскость занимает
положение так называемой соприкасающейся
плоскости, следовательно,
в общем случае вектор ускорения
лежит в соприкасающейся плоскости и
направлен в сторону вогнутости кривой.
расположен в плоскости, проходящей
через касательную к траектории в точке
М и прямую, параллельную касательной
в соседней точке М1. В пределе,
когда точка М1 стремиться к
точке М, эта плоскость занимает
положение так называемой соприкасающейся
плоскости, следовательно,
в общем случае вектор ускорения
лежит в соприкасающейся плоскости и
направлен в сторону вогнутости кривой.
Другой способ.
Построив годограф скорости СД (рис.
2.11), отложим там скорости
и
![]() ,
приращения скорости
,
а также вектор
,
приращения скорости
,
а также вектор
Рис. 2.11 среднего ускорения , направленного по хорде NN1 годографа скорости. Предел, к которому стремится вектор среднего ускорения точки в данный момент времени t равен:
![]() ,
,
а
так как скорость является вектором
функции от времени, то есть
![]() ,
а
,
а
![]() ,
,
то выражение ускорения имеет тот же вид, что и (2.14):
![]() .
.