

3.2.4. Динаміка відносного руху точки
Основне рівняння динаміки точки (3.3) виконується в умовно нерухомій системі координат.
Мета подальшого викладу – встановити закон, за яким можна складати диференціальне рівняння руху точки в рухомій системі координат, тобто встановити, що відповідає другому закону І.Ньютона в рухомій системі координат.
Нехай
відносно рухомого тіла, з яким жорстко
з’єднана рухома система координат
![]() ,
рухається точка М.
,
рухається точка М.
Рух
тіла відбувається відносно нерухомої
системи координат
![]() (рис. 3.13). Визначимо рух точки М
відносно системи
.
(рис. 3.13). Визначимо рух точки М
відносно системи
.
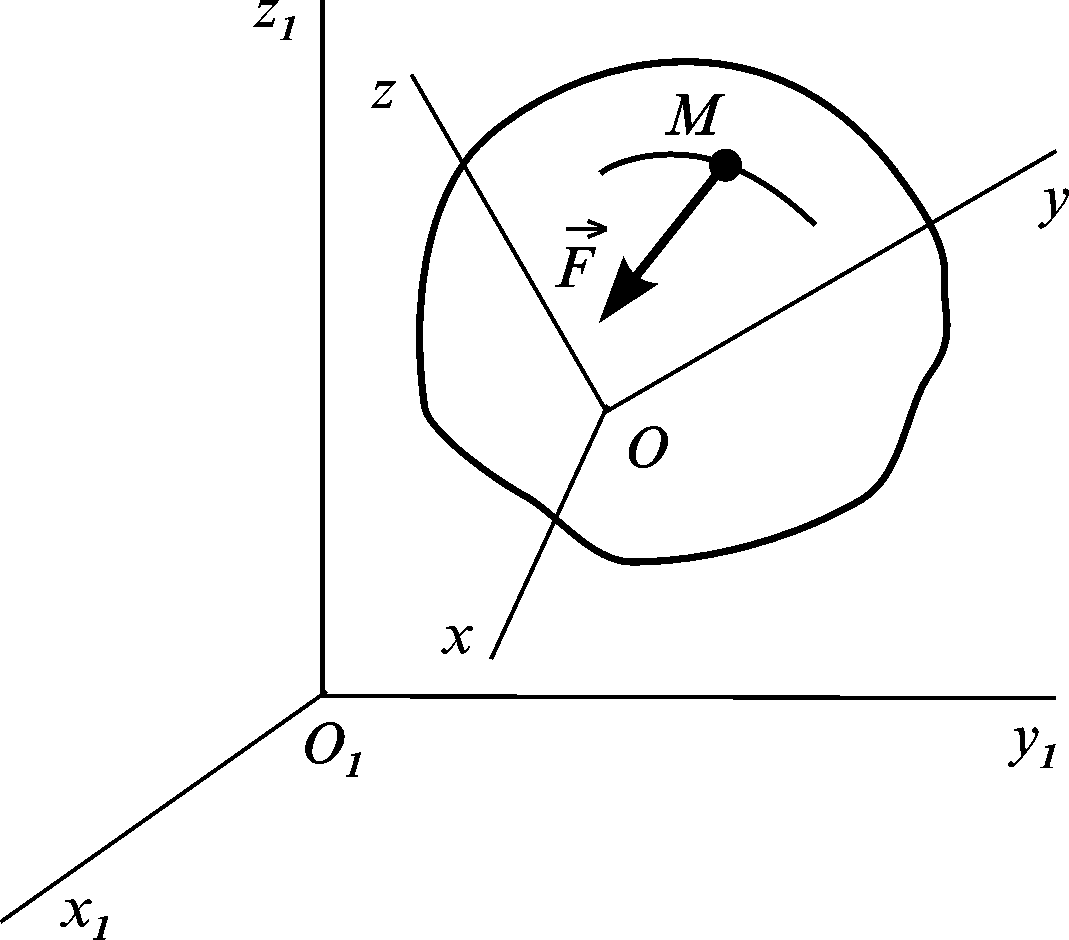
Рисунок 3.13
Другий закон І.Ньютона справджується в абсолютному русі, тобто
![]() .
(3.80)
.
(3.80)
На підставі теореми Коріоліса
![]() .
.
Тоді (3.80) набуде вигляду
![]() ,
,
звідки
![]() .
(3.81)
.
(3.81)
Оскільки згідно з (3.69)
![]() — переносна
сила інерції;
— переносна
сила інерції;
![]() — коріолісова
сила інерції,
— коріолісова
сила інерції,
то (3.81) набуде вигляду
![]() .
(3.82)
.
(3.82)
Це рівняння є основним законом динаміки у відносному русі:
добуток маси на відносне прискорення точки дорівнює векторній сумі рівнодійної сил, прикладених до точки, сили інерції переносного руху і коріолісової сили інерції.
Таким чином, прикладаючи до точки сили інерції переносного руху і коріолісову силу інерції, ми ніби зупиняємо рухому систему.
Щоб з’ясувати фізичний зміст цих сил інерції, розглянемо приклад, у якому рухомим тілом є земна куля (рис. 3.14), що обертається навколо власної осі (рух Землі навколо Сонця не розглядаємо). Нехай уздовж меридіана з півночі на південь рухається точка (вагон по рейках, частинка води у річці тощо).
Як відомо, коріолісове прискорення точки напрямлене із заходу на схід, а відповідна сила інерції за третім законом Ньютона прикладена до Землі і діє зі сходу на захід, внаслідок чого частинки води в північній півкулі розмивають правий берег (ефект Бера), праві рейки спрацьовуються швидше, ніж ліві тощо.
Таким чином,
якщо між точкою й тілом, рух якого є переносним, існує фізичний зв’язок, то сили інерції цілком реальні, але прикладені до тіла, яке здійснює переносний рух.
Рівняння (3.82) дає змогу також описувати рух точки відносно будь-якої рухомої системи координат, навіть не зв’язаної з точкою, наприклад, рух маятника Фуко відносно тролейбуса, який рухається вулицею. У таких випадках сили інерції є часто уявними математичними додатками, які вво- дяться до рівняння зовсім абстрактно.
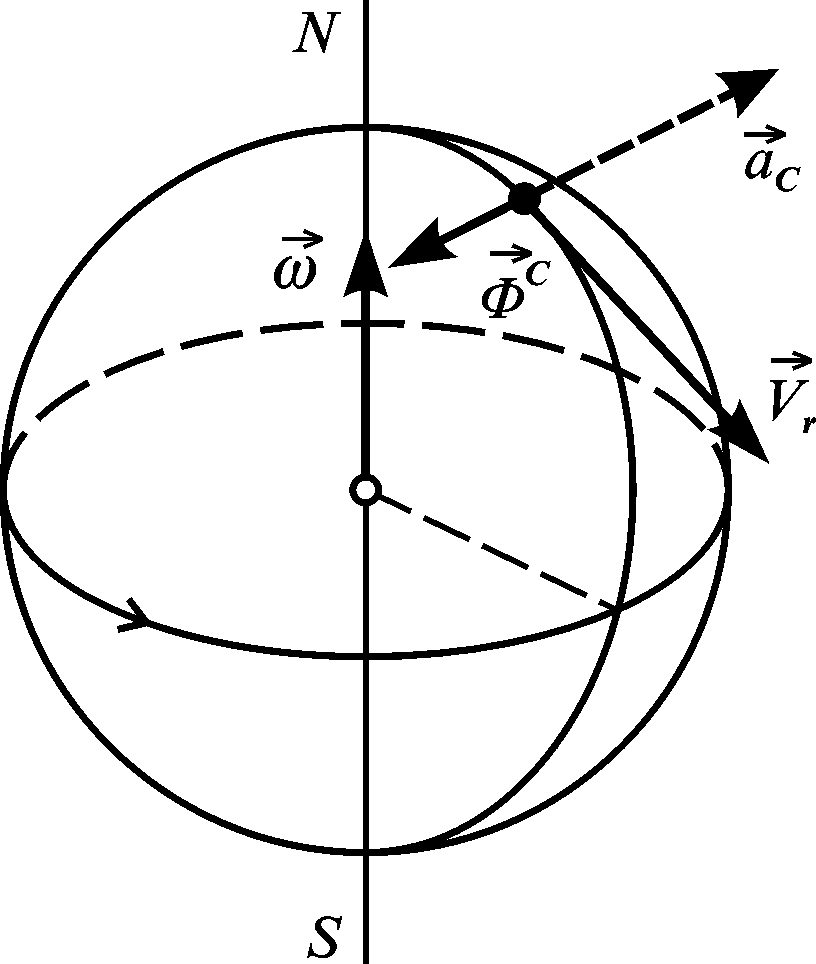
Рисунок 3.14
Вони є математичними поправками на неінерціальність системи координат.
Системи координат, у яких виконуються закони І.Ньютона, називають інерціальними.
Ця
назва, очевидно, пов’язана з першим
законом І.Ньютона – законом інерції.
За І.Ньютоном, нерухомою системою
координат є геліоцентрична. Але вона
також рухома, оскільки Сонце і зірки
рухаються. Відомо, що всі розрахунки на
підставі законів класичної механіки
мають досить велику точність. Це свідчить
про те, що поправка на неінерціальність,
яка дорівнює сумі
![]() ,
досить мала як у геліоцентричній, так
і в геоцентричній системах координат.
,
досить мала як у геліоцентричній, так
і в геоцентричній системах координат.
Розглянемо поняття відносної рівноваги точки.
Точка
знаходиться у стані відносної рівноваги,
якщо протягом скінченного проміжку
часу
![]() її відносна швидкість і відносне
прискорення дорівнюють нулеві, тобто
її відносна швидкість і відносне
прискорення дорівнюють нулеві, тобто
![]() .
На підставі цього означення та рівняння
(3.82) дістанемо необхідну умову відносної
рівноваги
.
На підставі цього означення та рівняння
(3.82) дістанемо необхідну умову відносної
рівноваги
![]() .
(3.83)
.
(3.83)
З’ясуємо, враховуючи (3.83), чим відрізняється одна від одної сили тяжіння і ваги.
З
Рисунок 3.15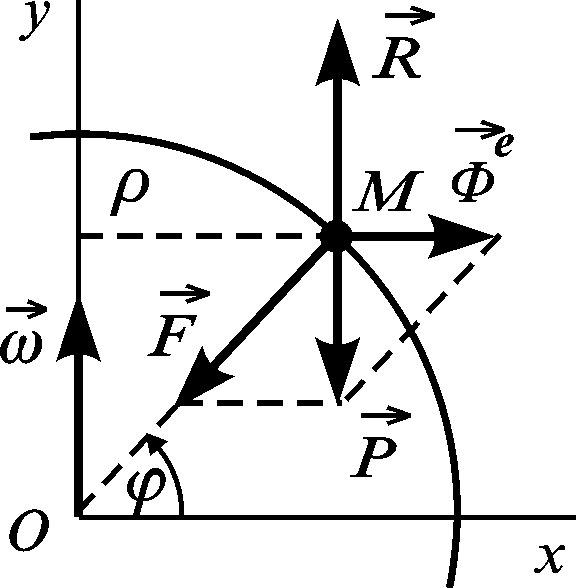
![]() – сила інерції переносного руху (за
рахунок обертання Землі навколо власної
осі).
– сила інерції переносного руху (за
рахунок обертання Землі навколо власної
осі).
Векторна сума цих сил дорівнює нулеві:
![]() .
(3.84)
.
(3.84)
Пружна сила (покази терезів) дорівнює за модулем силі ваги , тобто
![]() .
(3.85)
.
(3.85)
Отже, сила ваги дорівнює векторній сумі сили тяжіння та переносної сили інерції.
Довгий час силу не враховували, не помічаючи її через те, що вона дуже мала. Дійсно, модуль
![]() ,
,
де
![]() – радіус паралелі, яка проходить через
точку;
– радіус паралелі, яка проходить через
точку;
![]() ;
– кутова швидкість обертання Землі
;
– кутова швидкість обертання Землі
![]() рад/с
72,710-6
рад/с,
рад/с
72,710-6
рад/с,
тобто є дуже малою величиною.
Нарешті,
з’ясуємо, які кінематичні ознаки
інерціальних систем координат. Для
цього треба, щоб додаток в (3.82) у вигляді
суми
![]() дорівнював нулеві.
дорівнював нулеві.
Модуль коріолісової сили інерції
![]() .
.
Достатньою
умовою рівності її нулеві є
![]() ,
тобто тіло повинно рухатися поступально.
,
тобто тіло повинно рухатися поступально.
Сила інерції переносного руху складається з дотичної і нормальної сил:
![]() .
.
Перша
складова
![]() дорівнює нулеві, якщо тіло рухається
рівномірно
дорівнює нулеві, якщо тіло рухається
рівномірно
![]() ,
а друга –
,
а друга –
![]() – якщо прямолінійно
– якщо прямолінійно
![]() .
.
Отже,
інерціальна система координат – це така, що рухається поступально, рівномірно і прямолінійно.
Якщо існує хоча б одна інерціальна система координат, то будь-яка інша система координат, яка рухається відносно першої поступально, прямолінійно і рівномірно, також інерціальна. У механіці це твердження називають принципом відносності Галілея.
Приклад 3.3. Точка М масою ковзає вздовж гладенького півкола АМВ (рис. 3.16) пластини АBCD, яка рухається вздовж осі зі сталим прискоренням .
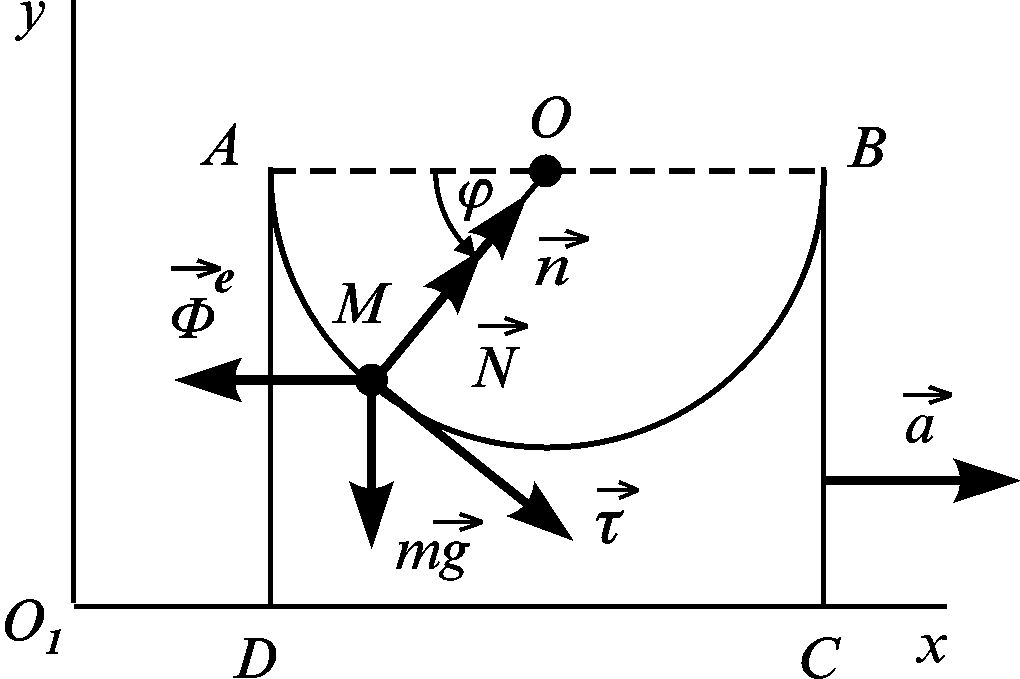
Рисунок 3.16
Знайти тиск на пластину точки М у найнижчому положенні, якщо в положенні А відносна швидкість точки М дорівнювала нулеві.
Розглянемо
рух точки М
відносно кривої АВ.
До точки прикладено силу ваги
і реакцію
![]() півкола, яка перпендикулярна до нього.
Тіло, відносно якого визначатиметься
рух точки М,
рухається з прискоренням
прямолінійно і поступально, тому до
точки потрібно прикласти тільки одну
силу інерції переносного руху, яка
дорівнює
півкола, яка перпендикулярна до нього.
Тіло, відносно якого визначатиметься
рух точки М,
рухається з прискоренням
прямолінійно і поступально, тому до
точки потрібно прикласти тільки одну
силу інерції переносного руху, яка
дорівнює
![]() і напрямлена вліво.
і напрямлена вліво.
Складаємо диференціальні рівняння відносного руху точки М у натуральній формі:
![]() (3.86)
(3.86)
Відомо, що
![]()
Отже,
![]() (3.87)
(3.87)
Реакцію
,
яка дорівнює тискові
визначатимемо з другого рівняння, але
для цього потрібно знайти
![]() .
.
Зауважимо,
що
![]() .
.
Підставимо цей вираз у перше рівняння системи (3.87)
![]() .
.
Тепер розділимо змінні
![]()
і проінтегруємо цей вираз
![]() .
(3.88)
.
(3.88)
Сталу
![]() знаходимо на підставі початкової умови
знаходимо на підставі початкової умови
![]() з рівняння (3.88):
з рівняння (3.88):
![]() .
.
Отже, вираз (3.88) остаточно має вигляд
![]() .
.
Цей вираз підставляємо в друге рівняння системи (3.87) і знаходимо
![]() .
.
Таке
значення має нормальна реакція у
довільному положенні точки М.
У найнижчому положенні
![]() .
Отже,
.
Отже,
![]() .
.
За третім законом І.Ньютона тиск точки на криву дорівнює за модулем силі , але напрямлений у протилежний бік.