

3.2. Динаміка системи матеріальних точок
3.2.1. Основні поняття
У підрозд. 1.1.3 дано означення фізичної в’язі. Запровадимо поняття рівняння в’язі.
Спочатку розглянемо в’язь у вигляді поверхні певного тіла, по якій рухається точка. Умовимося про координатний спосіб визначення руху. Аналітична умова знаходження точки на поверхні полягає у тому, що її координати задовольняють рівняння цієї поверхні:
![]() .
(3.54)
.
(3.54)
Рівняння (3.54) називають рівнянням в’язі.
Якщо поверхня рухається, то до (3.54) повинен входити час :
![]() .
(3.55)
.
(3.55)
Таку в’язь називають нестаціонарною, а в’язь (3.54) – стаціонарною.
Якщо точка рухається по кривій (наприклад, кільце рухається вздовж дроту), яка описується системою двох рівнянь, то в’язь аналітично визначається системою рівнянь
![]() (3.56)
(3.56)
тобто одна фізична в’язь має два рівняння. Тут і надалі кількість в’язей визначається кількістю рівнянь, якими описуються в’язі.
Наведемо
ще приклад. Нехай дві матеріальні точки
![]() і
і
![]() з’єднані прямим абсолютно твердим
стержнем довжиною
з’єднані прямим абсолютно твердим
стержнем довжиною
![]() .
Рівняння в’язі повинно відображати
незмінність відстані між точками
і
:
.
Рівняння в’язі повинно відображати
незмінність відстані між точками
і
:
![]() ,
(3.57)
,
(3.57)
де
![]() – координати точок
– координати точок
![]() .
.
Якщо
довжина стержня змінна, до правої частини
(3.57) повинен входити час
.
Отже, рівняння нестаціонарної в’язі у
загальному випадку має бути функцією,
яка зв’язує координати точок системи
![]() з часом
і відображає особливості в’язі:
з часом
і відображає особливості в’язі:
![]() ,
(3.58)
,
(3.58)
де – кількість точок, що належать системі.
Кількість
![]() рівнянь типу (3.58) є кількістю в’язей.
рівнянь типу (3.58) є кількістю в’язей.
Якщо до рівняння в’язі входять лише координати точок і час, то в’язь називають геометричною нестаціонарною.
У
складнішому випадку, крім координат
точок і часу, функція
![]() може
залежати й від похідних за часом від
координат точок:
може
залежати й від похідних за часом від
координат точок:
![]() .
(3.59)
.
(3.59)
Таку в’язь називають кінематичною (диференціальною). Один приклад найпростішої кінематичної в’язі завжди наводиться у підручниках. Це – горизонтальна площина, по якій без ковзання котиться куля. Справді, точка А дотику кулі до площини має нульову швидкість, тому умова
![]()
є рівнянням кінематичної в’язі у векторній формі.
Якщо рівняння (3.59) можна проінтегрувати, то дістанемо геометричну в’язь. У цьому разі первісне рівняння називають рівнянням голономної (інтегрованої) в’язі.
Розглянемо лише геометричні в’язі.
Припустимо,
що на
точок системи накладено k
в’язей типу (3.58). Тоді з 3
координат точок залишаються незалежними
лише
![]() ,
оскільки k
координат зв’язані між собою
залежностями.
,
оскільки k
координат зв’язані між собою
залежностями.
Кількістю
степенів вільності
![]() системи називають кількість незалежних
координат (параметрів), які однозначно
визначають положення точок системи.
системи називають кількість незалежних
координат (параметрів), які однозначно
визначають положення точок системи.
Наприклад, якщо точка рухається у просторі по кривій, то вона має одну степінь вільності, бо три координати точки зв’язані між собою двома рівняннями типу (3.56). Отже, кількість степенів вільності
![]() .
(3.60)
.
(3.60)
Наведемо ще приклади.
Тіло, яке обертається навколо нерухомої осі, має одну степінь вільності, оскільки положення всіх його точок визначаються одним параметром — кутом обертання навколо осі.
|
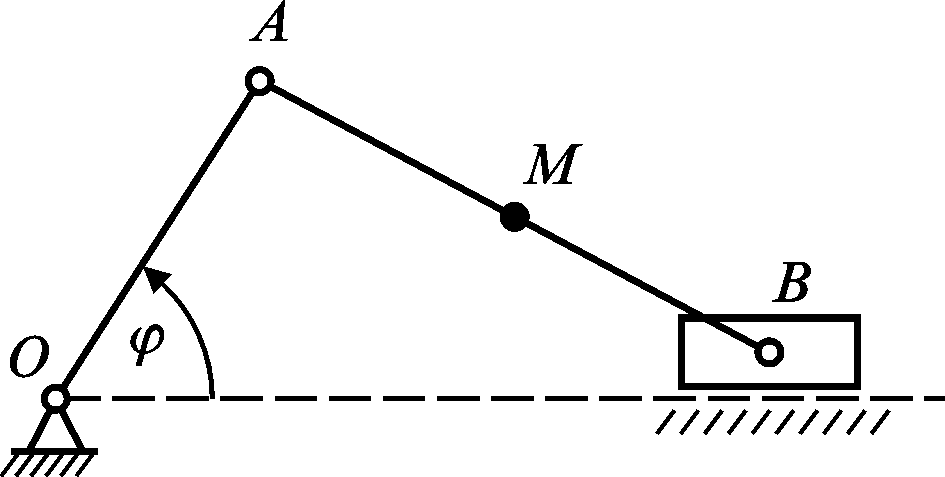
Кривошипно-шатунний
механізм (рис. 3.10) також має одну степінь
вільності, оскільки координати
будь-якої точки
повністю визначаються кутом
Припустимо, є система матеріальних точок, масою |
Рисунок 3.10 |
прикладено
сили, що надають точкам однакові
прискорення![]() ,
до яких. Згідно з другим законом І.Ньютона
можна знайти сили, які є паралельними
між собою:
,
до яких. Згідно з другим законом І.Ньютона
можна знайти сили, які є паралельними
між собою:
![]() .
(3.61)
.
(3.61)
Центром мас (центром інерції) системи називають центр паралельних сил, які надають точкам системи поступального руху.
Радіус-вектор
центра мас позначатимемо
![]() і на підставі формули (1.55) визначатимемо
і на підставі формули (1.55) визначатимемо
 ,
(3.62)
,
(3.62)
тут
![]() – маса системи.
– маса системи.
Декартові координати центра мас знаходять за формулами
 .
(3.63)
.
(3.63)
Якщо
помножити чисельник і знаменник правих
частин кожного виразу (3.63) на прискорення
![]() ,
то матимемо координати центра ваги
системи. Це свідчить про те, що центр
мас збігається з центром ваги, якщо
останній існує; уявлення про центр мас
ширше за уявлення про центр ваги.
,
то матимемо координати центра ваги
системи. Це свідчить про те, що центр
мас збігається з центром ваги, якщо
останній існує; уявлення про центр мас
ширше за уявлення про центр ваги.
Кількістю
руху
![]() матеріальної системи називають векторну
суму кількостей руху точок системи:
матеріальної системи називають векторну
суму кількостей руху точок системи:
![]() .
(3.64)
.
(3.64)
Якщо система є суцільним середовищем з неперервним розподілом мас, то кількість руху визначається за допомогою інтегрування
![]() .
.
Але, щоб уникнути інтегрування в кожному окремому випадку, доведемо теорему, згідно з якою
кількість руху системи дорівнює кількості руху матеріальної точки, маса якої дорівнює масі системи, а швидкість дорівнює швидкості центра мас системи.
Запишемо формулу (3.62) у вигляді
![]() ,
,
а потім продиференціюємо праву і ліву частини один раз за часом:
![]() .
.
Сума
в правій частині дорівнює кількості
руху
![]() системи. Отже,
системи. Отже,
![]() .
(3.65)
.
(3.65)
Вираз
(3.65) свідчить, що кількість руху не завжди
може визначати міру руху системи, тобто
її динамічні властивості, оскільки при
![]() кількість руху системи
кількість руху системи
![]() .
Але система може, наприклад, обертатися
навколо центра мас, тобто рухатися.
.
Але система може, наприклад, обертатися
навколо центра мас, тобто рухатися.
Кількість руху характеризує повністю динамічні властивості системи лише при її поступальному русі.
Зауважимо, що кількість руху є так званою першою мірою руху, або мірою Декарта.