

7.6.2 Система с і-регулятором
Розширена амплитудно-фазова характеристика І-регулятора має вигляд

З урахуванням цієї характеристики система рівнянь (7.12) для визначення настройки So і робочої частоти записується у вигляді
(7.15)
Р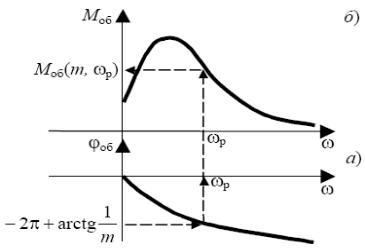 ис.
7.14Визначення
настройки І-регулятора, що забезпечує
задану ступінь коливальності:
ис.
7.14Визначення
настройки І-регулятора, що забезпечує
задану ступінь коливальності:
а – визначення робочої частотиωР;
б – визначення значення РАЧХ об'єкта при робочій частоті ωР.
Рішення системи рівнянь (7.15) може бути проведене як аналітично, так і графічно. Графічне рішення другого рівняння з метою визначення робочої частоти представлене на рис. 7.14, а.
На
рис. 7.14, б
представлено
визначення значення РАЧХ об'єкта при
робочій частоті. Настройка
 І-регулятора, що забезпечує задану
ступінь коливальності, визначається
співвідношенням
І-регулятора, що забезпечує задану
ступінь коливальності, визначається
співвідношенням
 (7.16)
(7.16)
7.6.3 Система с пі-регулятором
Розширена амплитудно-фазова характеристика ПІ-регулятора

звідки для регулятора
РАЧХ
-

РФЧХ
-

ПІ-регулятор
має два параметри настройок
 і
і
 ,
які разом з ωр
підлягають розрахунку. Система рівнянь
(7.12) записується у вигляді:
,
які разом з ωр
підлягають розрахунку. Система рівнянь
(7.12) записується у вигляді:
(7.17)
Отримана система дозволяє визначити тільки два невідомих, а треба три, тому вона має нескінченну безліч рішень.
Для отримання цих рішень система вирішується щодо значень настройок:
 (7.18)
(7.18)
де:

По
заданій робочій частоті визначаються
настройки
 згідно
системі рівнянь (7.18). Задаючи різні
частоти і визначаючи по ним настройки,
будується межа заданого ступеня
коливальності в площині параметрів
(рис.
7.15), яка називається кривою рівного
ступеню коливальності. Будь-яка точка
цієї кривої відповідає вимогам
забезпечення запасу стійкості заданого
ступеня коливальності
згідно
системі рівнянь (7.18). Задаючи різні
частоти і визначаючи по ним настройки,
будується межа заданого ступеня
коливальності в площині параметрів
(рис.
7.15), яка називається кривою рівного
ступеню коливальності. Будь-яка точка
цієї кривої відповідає вимогам
забезпечення запасу стійкості заданого
ступеня коливальності
 .
.
Крім
того, крива рівного ступеня коливальності
ділить всю площину настройок So,
S1
на дві області: настройки, які лежать
над кривою, відповідають ступені
коливальності менше заданої ,
а настройки, які лежать під кривою,
відповідають ступені коливальності
більше заданої
,
а настройки, які лежать під кривою,
відповідають ступені коливальності
більше заданої
 .
Завдання різних значень ступеню
коливальності дозволяє отримати
сімейство кривих (рис. 7.15), причому
,
а
.
Завдання різних значень ступеню
коливальності дозволяє отримати
сімейство кривих (рис. 7.15), причому
,
а
 ,
і всі вони розташовуються нижче за межу
стійкості m
= 0.
,
і всі вони розташовуються нижче за межу
стійкості m
= 0.
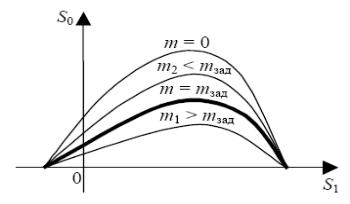
Рис. 7.15 Межа заданого ступеня коливальності для ПІ-регулятора
7.6.4 Система з пд-регулятором
Розширена амплитудно-фазова характеристика ПД-регулятора записується у вигляді

звідки:
РАЧХ
-

РФЧХ
-

Тут
також три невідомих
 ,
,
 ,
ωр
і
два рівняння системи (7.12), рішення якої
щодо настройок,
дозволяє
записати їх у вигляді:
,
ωр
і
два рівняння системи (7.12), рішення якої
щодо настройок,
дозволяє
записати їх у вигляді:
 (7.19)
(7.19)
Задаючи різні робочі частоти і визначаючи відповідні їм настройки, в площині параметрів настройок , будується крива рівного ступеня коливальності (рис. 7.16). Будь-яка точка цієї кривої відповідає вимозі, що m = mзад. Вище за криву m<mзад, а нижче – т >mзад .
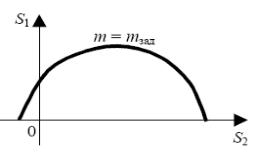
Рис.7.16 Межа заданого ступеня коливальності
Запропоноване рішення питання забезпечення стійкості і створення запасу стійкості припускало, що структура системи, а також тип регулятора задані, але існують і інші способи, відмінні від розглянутих.