

Свойства определителей
Каждой квадратной
матрице можно поставить в соответствие
число, которое называется определителем,
которое обозначается d(A)
или ![]() = detA
= detA
Для матрицы A1 = (a)
Det(a) = |a| = a
A2 =

![]() = a11a22
– a12a21
= a11a22
– a12a21
detA3 = a11a22a33 + a12a23a31 + a21a32a13 – a13a22a31 – a12a21a33 – a23a32a11
свойства определителей.
Det(AB) = det(A)det(B)
detA = detAT Определитель матрицы равен определителю транспонированной матрицы, т.е. любое верное утверждение относительно строк определителя остается верным и для столбцов
общий множитель любой строки (столбца) определителя можно вынести за знак определителя, т.о. если у определителя имеется нулевая строка (столбец), то он равен нулю.
Если у определителля поменять местами любые две строки (столбца), то он изменит знак на противоположный, т.е. если у определителя 2 одинаковых (пропорциональные) строки (столбца), то он равен нулю.
Если каждый элемент строки/столбца представлен в виде суммы 2ух слагаемых, то этот определитель равен сумме 2ух определителей.
Если к одной троке определителся прибавить любую другую строку, умноженную на любое число, то он не изменится.
Минор, алгебраическое дополнение, теорема лапласа.
Пусть Amxn – произвольная матрица и 1<=k<=min(m,n), kN. Выберем произвольным образом в матрице А k строк и k столбцов. Выбранные строки и столбцы образуют квадратную матрицу М порядка k. Определитель матрицы Мk называется минором k-того порядка матрицы А.
Пусть Аn – произвольная квадратная матрица порядка n. У этой матрицы будет равна n2 миноров n-1 порядка, т.к. выбрав n-1 строку и n-1 столбец, это то же самое, что выбросить одну строку и столбец. На их пересечении стоит какой-то элемент (однозначно определенный). Поэтому любой минор n-1 порядка можно получить след образом: выбрать произвольный элемент матрицы aij и мысленно вычеркнуть строку и столбец, в которой он стоит. Полученный минор (определитель) обозначим Мij = detMn-1 – минор, полученный из исходной матрицы вычеркиванием i-той строки и j-того столбца.
Пусть аij произвольный элемент матрицы Аn. Алгебраическим дополнением элемента аij называется число Аij , определяемое по формуле
Aij = (-1)i+jMij
Теорема Лапласа
Определитель матрицы равен сумме попарных произведений эелементво любой строки (столбца) на их алгебраическое дополнение. Следствие: определитель треугольной матрицы равен произведению диагональных элементов. Вычисление определителя по т.Лапласа называется разложением определения по i строке (j столбцу)
Обратная матрица.
Понятние обратной матрицы существует только для квадратных матриц.
Определение. Пусть а – квадратная матрица. Матрицей, обратной А, называется матрица, обозначаемая А-1, такая что АА-1 = А-1А = Е, где Е – единичная матрица.
Квадаратная матрица называется невырожденной, если ее определитель отличен от нуля, и вырожденной – в противном случае.
Теорема: для того, чтобы квадратная матрица А имела обратную, необходимо и достаточно, чтобы ее определитель был отличен от нуля.
Доказательство. Есть А-1 detA0
Необходимость. У А есть А-1
Надо доказать что detA0
Т.к. АА-1 = Е => det(AA-1) = detE => detAdetA-1 = detE. Т.е. detAdetA-1=1 =>detA0
Достаточность. Дано: detA0. Надо доказать что существует А-1
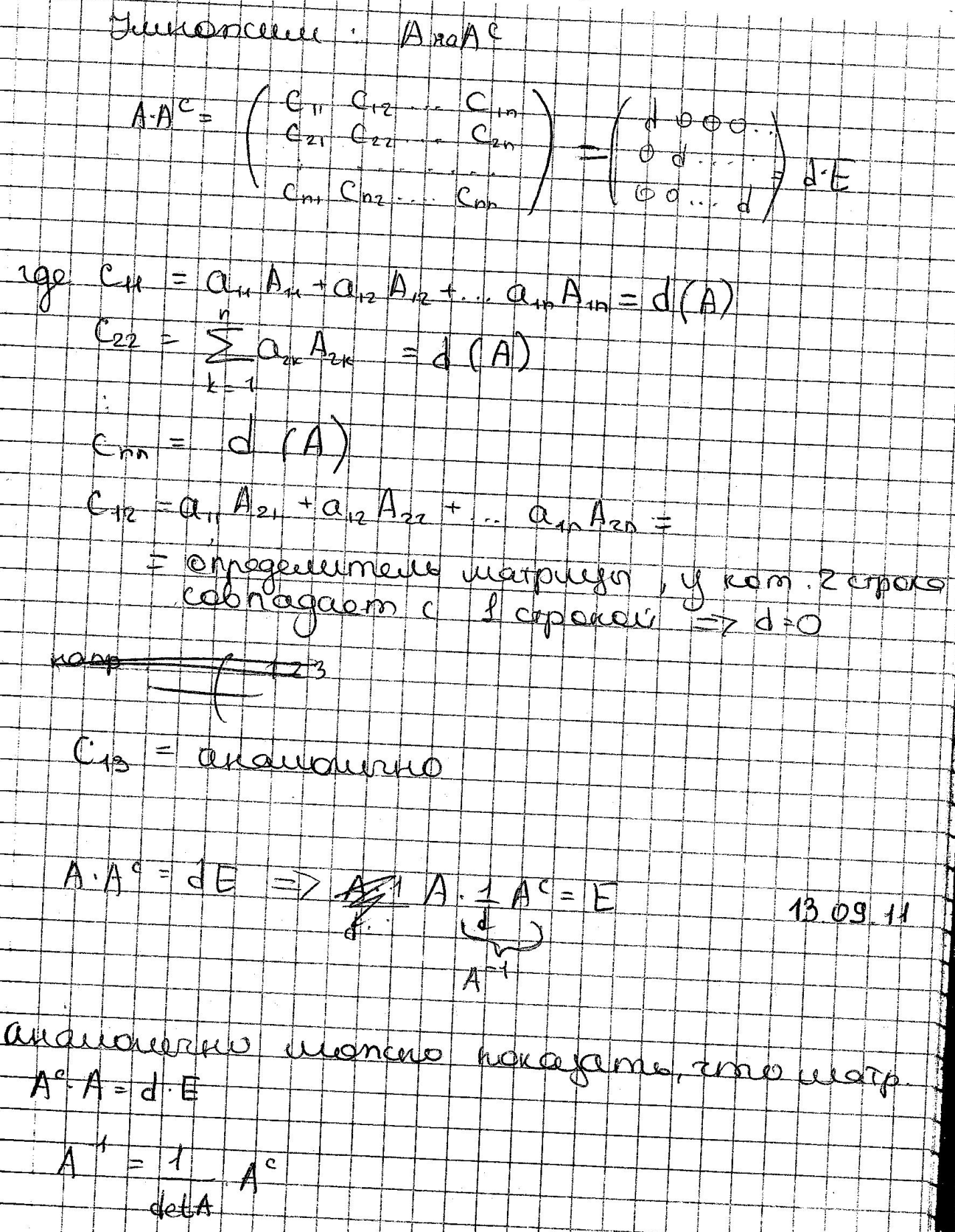
Схема построения обратной матрицы.
Находим detA=d0
Находим все алгебраические дополнения Aij
Строим матрицу Ас = (Aij)T
A-1 = (1/detA)Ac
Если обратная матрица существует, то она единственная. Действительно. A, detA0 и пусть B, C – две обратные к А.
Рассмотрим. BAC = (BA)C = EC = C => B=C
B(AC) = BE = B
Понятие обратной матрицы позволяет решать т.н. матричные ур-я вида АХ = В, где А, В – заданные матрицы, Х – неизвестная матрица.
Действительно. Если |A|0 , то есть A-1 умножим: A-1(AX) = A-1B => X=A-1B
Аналогично: XA = B, X=BA-1
Или: AXB = C => X = A-1CB-1