

Оптимальная фильтрация
Аналогично рассмотренной задаче об оптимальном управлении в технике связи существует задача об оптимальной фильтрации сигнала в присутствии помех. Эта задача весьма актуальна, так как ее решение позволяет повысить помехозащищенность приемника. Она предусматривает отыскание такой частотной (или переходной) характеристики фильтра, которая обеспечит наилучшее (в смысле определенного критерия качества) выделение сигнала из сопровождающих его помех. На основе теории, разработанной А. Н. Колмогоровым (1941) и Н. Винером (1949), развит достаточно общин математический метод отыскания оптимальных характеристик фильтров, но подобно математическому аппарату теории оптимального управления он эффективен при условии, что имеются достаточно полные сведение о свойствах фильтруемого сигнала и помех. Кроме того, решение удается доводить до конца лишь в случаях, когда структура выделяемого сигнала и сопровождающих его помех не слишком сложна, а используемый критерий качества удобен для математического анализа.
Наиболее четкое решение задачи оптимальной фильтрации получено для случая, когда сигнал описывается точно известной функцией времени s(t), помехи n(t) представляют собой случайный нормальный процесс типа «белого шума» (с одинаковой на всех частотах спектральной плотностью), а задачей приемника является обнаружение факта передачи сигнала s(t). Соответственно в роли критерия качества выступают отношение сигнал-шум на выходе фильтра, так как чем больше это отношение, тем меньше вероятность пропуска обнаруживаемого сигнала или ложной тревоги (принятия ошибочного решения о наличии сигнала, когда в действительности он не передавался). Специфика такой задачи заключается в том, что, поскольку сигнал s(t) известен, нет необходимости воспроизводить его форму на выходе фильтра. Достаточно, чтобы выходной сигнал фильтра представлял собой одиночный импульс появляющийся всякий раз, когда на вход этого фильтра поступает заданный сигнал s(t). Однако для достижения наибольшего отношения сигнал-шум (что позволит четко обнаруживать появление такого импульса на фоне случайно флуктуирующего напряжения шума) надо позаботиться о том, чтобы этот импульс имел по возможности большую величину.
Проиллюстрировать идею построения оптимального фильтра для такого рода задачи можно на примере сигнала типа телеграфного. На рис. 76, а представлен телеграфный сигнал, несущий сообщение — слово «МИР», закодированное азбукой Морзе. Продолжительности точек, тире и пауз приняты кратными некоторому элементарному интервалу т — такту, так что полная длина сигнала «МИР» составляет 18 тактов. Вполне очевидно, что для получения на выходе фильтра максимального импульса в ответ на данный сигнал надо постараться так сконструировать этот фильтр, чтобы он в некоторый момент времени просуммировал энергию всех элементарных импульсов, содержащихся в данном сигнале. Такую операцию можно выполнить с помощью устройства, схема которого приведена на рис. 76, б.
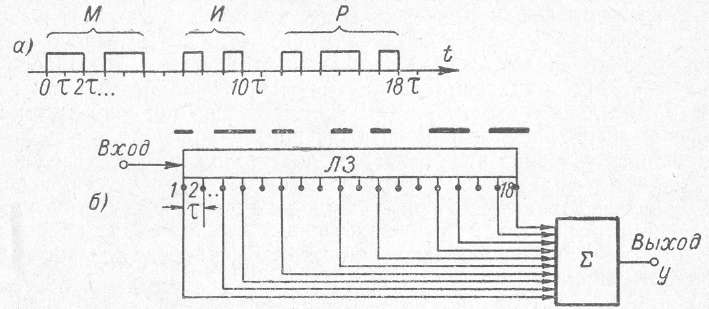
Рис. 76. Телеграфный сигнал (а) и схема согласованного с ним фильтра (б).
Оно состоит из линии задержки ЛЗ. с равноотстоящими друг от друга отводами и суммирующего устройства 2. Время задержки между соседними отводами ЛЗ в точности равно такту т. Если на вход JI3 подать сигнал «МИР» (рис. 76, а) то с каждого отвода ЛЗ можно снять этот же сигнал с различными задержками во времени, кратными т: без задержки (^зі = 0) с отвода № 1, с задержкой на t32=r с отвода № 2, с задержкой на ^зз = 2тс отвода № 3 и т. д. Спустя 17 тактов на последнем отводе ЛЗ (№ 18) появится первый импульс, соответствующий началу передачи сигнала (первое тире буквы М), а на первом отводе — последний импульс (последняя точка буквы Р). При этом распределение напряжений на всех отводах вдоль ЛЗ будет соответствовать пространственной развертке сигнала в направлении, обратном текущему времени, как показано жирными черточками над изображением линии задержки. В момент, когда весь сигнал уложился в пределы ЛЗ, можно получить максимальный выходной импульс, если просуммировать напряжения со всех отводов линии, на которых данный сигнал создает напряжение. Такое суммирование осуществляет сумматор 2, входы которого присоединены к соответствующим отводам, как показано на рис. 76, б. Сигнал «МИР» включает в себя 10 элементарных посылок (по одной — каждая точка и по две — каждое тире), таким образом, используются для суммирования 10 отводов JI3, и выходной сигнал сумматора будет в 10 раз превышать элементарную посылку.
Покажем, что описанное устройство не только увеличивает напряжение, создаваемое заданным сигналом (это можно сделать и при помощи обычного усилителя), но и улучшает отношение сигнал-шум. Шум n(t) можно представить как случайно накладывающиеся па полезный сигнал s(t) элементарные импульсы той же длительности т, но произвольной полярности, например, как на рис. 77, б. Суммирование в рассмотренном устройстве происходит только в интервалы, соответствующие наличию импульсов в полезном сигнале (он вновь воспроизведен на рис. 77, а), т. е. в пределах заштрихованных участков графика n(t) рис. 77, б.
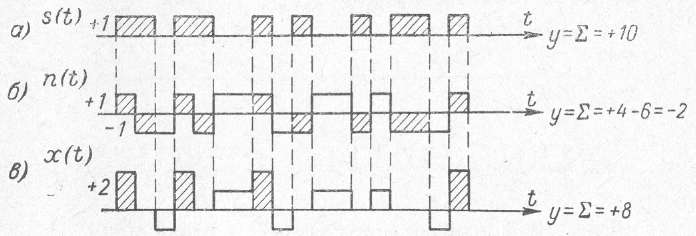
Рис. 77. Полезный сигнал (а), случайная помеха (б) и их сумма (е).
Заштрихованы участки сигналов, суммируемые фильтром, согласованным с полезным сигналом.
Ввиду случайного характера шума число его импульсов с положительной полярностью примерно совпадает с числом импульсов отрицательной полярности, и при суммировании большая часть их взаимно компенсируется. Действительно, для реализации n(t), показанной на рис. 77, б, сумма импульсов, совпадающих по времени с импульсами полезного сигнала, равна всего лишь — 2, в то время как для полезного сигнала она составляет +10. Поэтому, несмотря на то, что наложение этого шума на полезный сигнал искажает его до неузнаваемости (рис. 77, s), выходной сигнал у описанного фильтра изменяется незначительно, с +10 до +8.
Для
обнаружения факта передачи заданного
сигнала обычно выходной импульс фильтра
у
сравнивают с некоторым порогом
![]() .
Если y>
,
принимают решение, что сигнал передавался;
если же
у<
,
то считают, что передачи не было. Можно
принять, например,
.
Если y>
,
принимают решение, что сигнал передавался;
если же
у<
,
то считают, что передачи не было. Можно
принять, например,
![]() равным
5 — половине значения отклика фильтра
на заданный сигнал в отсутствие помех.
Тогда действие помехи, показанной на
рис. 77, б, не вызовет ошибок ни типа ложной
тревоги (в отсутствие сигнала у=—2<
),
ни типа пропуска (при наличии сигнала
у=8>
).
равным
5 — половине значения отклика фильтра
на заданный сигнал в отсутствие помех.
Тогда действие помехи, показанной на
рис. 77, б, не вызовет ошибок ни типа ложной
тревоги (в отсутствие сигнала у=—2<
),
ни типа пропуска (при наличии сигнала
у=8>
).
Рассмотренный пример построения оптимального фильтра для телеграфного сигнала позволяет сформулировать общее правило решения задачи синтеза оптимальных фильтров для известного сигнала s(t) любого вида при помехе типа нормального белого шума. Для этого достаточно обратить внимание на импульсную характеристику полученного фильтра. Импульсной характеристикой называют отклик y(t) динамической системы на входное воздействие x(t) в виде короткого одиночного импульса. Если подать на вход линии задержки на рис. 76, б элементарный импульс длительностью т, то он сразу же появится на отводе № 1, спустя т — на отводе № 2 и т. д. Проследив положение отводов, присоединенных к сумматору Б, нетрудно определить отклик данного фильтра на такой импульс. Он изображен на рис. 78, б.
Из сопоставления рис. 78, б с рис. 76,а ясно видно, что импульсная характеристика фильтра является зеркальным отображением сигнала s(t), для оптимальной фильтрации которого данный фильтр построен. Это соотношение оказывается универсальным при любом виде сигнала s(t). Обозначая импульсную характеристику символом g(t), сформулированное условие можно записать в математической форме:
![]() (33)
(33)
где Та — время задержки отклика фильтра относительно начала сигнала s(t). Если продолжительность сигнала равна Тс, то для физически реализуемого фильтра Т3>ТС-
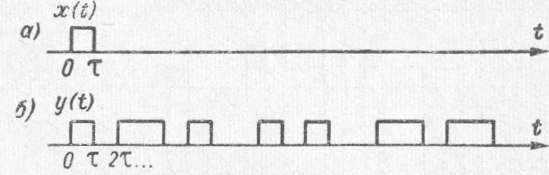
Рис. 78. Пробный импульс (а) и реакция на него (б) фильтра,
показанного на рис. 78,6.
Фильтр, импульсная характеристика которого связана с функцией, описывающей сигнал, соотношением (33), называется согласованным с данным сигналом. Согласованный фильтр является оптимальным в случае, когда помеха представляет собой нормальный белый шум. Решение задачи оптимальной фильтрации при помехах иного вида сложнее и не всегда может быть получено теоретически. К этому вопросу мы еще вернемся впоследствии.
Изображенная на рис. 76, б схема с линией задержки позволяет при вариации числа отводов и точек суммирования строить фильтры, согласованные и с другими телеграфными сигналами. Но очень часто сигналы s(t) бывают непрерывными и знакопеременными функциями времени, как, например, на рис. 79, а. В этом случае построить оптимальный фильтр с помощью устройства с линией задержки помогает теорема В. А. Котельни- кова. Согласно этой теореме любой сигнал с ограниченной полосой частот можно описать без потери заключенной в нем информации рядом чисел (дискретных отсчетов), равных мгновенным значениям данного сигнала через определенные промежутки времени т. Интервал дискретизации т должен быть не больше половины периода высшей частотной составляющей, присутствующей в сигнале. Описание сигнала s(t) (рис. 79, а) с помощью теоремы Котельникова показано на рис. 79, б. Очевидно, фильтр, согласованный с таким сигналом, должен иметь импульсную характеристику, отсчеты которой через такие же интервалы г будут следовать в обратном порядке, как на рис. 79, в. Отсюда вытекает общий путь реализации согласованного фильтра с линией задержки для любого сигнала: ог линии задержки длиной, соответствующей общей продолжительности сигнала, делаются отводы с шагом т, равным полупериоду высшей частотной составляющей сигнала; снимаемые со всех отводов напряжения суммируются с коэффициентами, пропорциональными отсчетам сигнала в соответствующие моменты времени (с учетом их знака). Схема, реализующая этот принцип, приведена на рис. 80.
В отличие от ранее описанной (рис. 76, б) в этой схеме напряжения, снимаемые с каждого отвода </73, подаются на сум-
Рис.
79. Знакопеременный непрерывный сигнал
(а),
его представление дискретными
отсчетами (б) и импульсная характеристика
согласованного фильтра (в).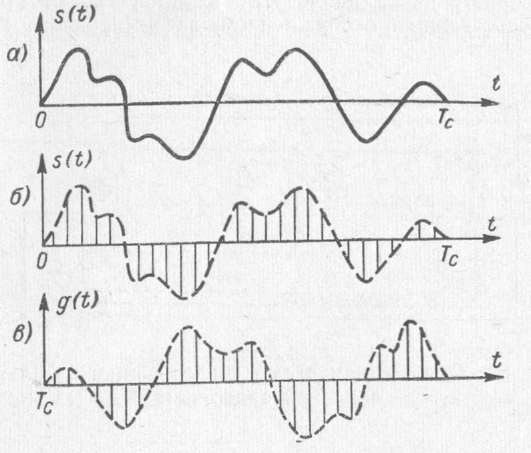
матор через весовые элементы си. В качестве последних могут служить сопротивления, потенциометры или другие элементы, позволяющие устанавливать различные коэффициенты передачи, соответствующие нужным значениям отсчетов импульсной характеристики. Смена знака может производиться при помощи трансформатора или инвертора.
Если вдуматься в принцип работы оптимального фильтра с линией задержки, то можно обнаружить, что он осуществляет умножение мгновенных значений входного сигнала x(t) на соответствующие им по времени мгновенные значения известного полезного сигнала s(i) и выдает в качестве выходного сигнала y(t) сумму этих произведений:
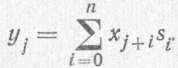 (34)
(34)
Здесь индексом і (і=О, Г, 2, ..., п) обозначены номера последовательных отсчетов заданного сигнала s(t), а индексом і — номер текущего отсчета фильтруемого сигнала на последнем отводе линии задержки.
Действительно, в каждый /-й момент времени на выходе фильтра появляется сумма п предшествующих отсчетов мгновенных значений входного сигнала x(t), снятых с отводов ЛЗ и помноженных на весовые коэффициенты а,-. Последние согласно условию (33) соответствуют отсчетам заданного сигнала s(t) в те же моменты времени. В отсутствие помех [n(t) в формуле (26) равно нулю] имеем x(t)=s(t), и в фильтре происходит умножение полезного сигнала s(t) на самого себя. В момент /=О, когда, распространяясь вдоль ЛЗ, входной сигнал s(t) совместится с собственным отображением, зафиксированным в весах
Рис.
80. Обобщенная схема согласованного
фильтра с линией задержки.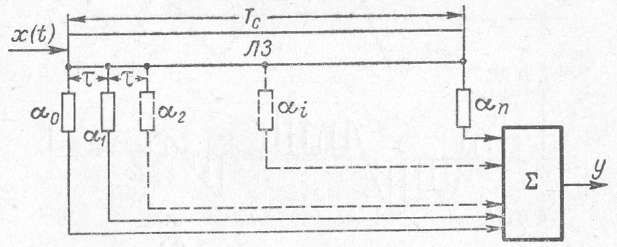
а,-, на выходе фильтра появится максимальный отклик, так как просуммируются мгновенные значения сигнала, умноженные на себя, т. е. их квадраты — все положительные величины:

Эта же операция по отношению к другим сигналам, в том числе к случайному шуму ti(t), приводит к суммированию произведений независимых величин n,Si с разными знаками, которые в значительной мере компенсируют друг друга. Поэтому при наличии во входном сигнале x(t) как заданного сигнала s(t), так и шума n(t), выходной сигнал оптимального фильтра в момент /=0 представляется суммой:
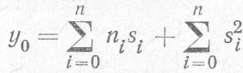 (35)
(35)
в которой первая группа слагаемых, описывающая отклик на шумовую составляющую входного сигнала, невелика, а вторая группа слагаемых, отражающая реакцию на заданный сигнал, максимальна. Отношение этих двух групп слагаемых представляет собой отношение мощностей сигнал-шум на выходе оптимального фильтра:
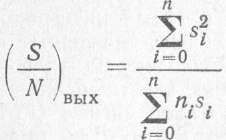 (36)
(36)
причем, как показывает теория, это отношение пропорционально числу независимых отсчетов п фильтруемого сигнала, т. е. возрастает с увеличением продолжительности сигнала s(7).
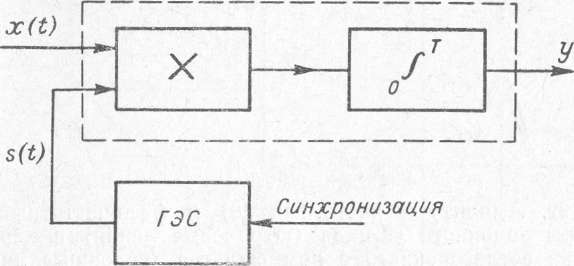
Рис. 81. Схема активного оптимального фильтра.
Если полоса частот, занимаемая сигналом, равна W, а длительность сигнала Тс, то согласно теореме Котельникова число независимых отсчетов такого сигнала
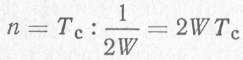 (37)
(37)
и называется базой сигнала. Таким образом, переходя от оценки отношения мгновенных значений сигнала и шума к оценке отношения сумм произведений (36), взятых по всей базе сигнала, видим, что оптимальный фильтр повышает отношение сигнал-шум в 2WT0 раз.
Соотношения (34) — (35) подсказывают и другой способ технической реализации оптимального фильтра, без использования линии задержки. Умножить входной сигнал x(t) на заданный известный сигнал и просуммировать мгновенные значения этого произведения можно при помощи устройства, показанного на рис. 81. Здесь собственно фильтрующим устройством служат два блока, обведенные штриховой рамкой, называемые коррелятором. Первый блок коррелятора (X) осуществляет перемножение мгновенных значений напряжения сигналов, подводимых к двум его входам, а второй называемый интегратором (j ) суммируют получающиеся мгновенные значения произведений на протяжении определенного интервала времени Т. Для того чтобы коррелятор выполнил ту же функцию, что и оптимальный фильтр с линией задержки, надо на один его вход подать принимаемый сигнал х (t), на второй вход —образец заданного полезного сигнала s(t), а время интегрирования (суммирования произведений их мгновенных значений) Т взять равным длительности сигнала Гс. Поскольку заданный сигнал s(t) известен, в принципе всегда можно ввести в приемное устройство генератор, вырабатывающий такой сигнал (ГЭС — генератор эталонного сигнала). Но этого мало. Для получения максимального отклика на полезный сигнал необходимо еще, чтобы эталонный сигнал генерировался синхронно с принимаемой его реализацией, присутствующей во входном сигнале x(t), т. е. начинался в тот же самый момент, что и принимаемый сигнал.
Оптимальные фильтры такого типа, использующие эталонные реализации выделяемых сигналов, называются активными фильтрами. Активные оптимальные фильтры оказываются более универсальными: один и тот же коррелятор годится для выделения любых сигналов s(t)\ при переходе от приема одного сигнала к приему другого достаточно сменить генератор ГЭС и, если требуется, изменить время интегрирования Т. Фильтры же с линиями задержки требуют перенастройки всех весовых коэффициентов, а возможно, и замены самой линии задержки (шага отводов т, их числа п и общей длины линии). В то же время активный фильтр нуждается в синхронизации ГЭС, которую нелегко осуществить при плохом отношении сигнал-шум.
Возможна еще одна реализация оптимального фильтра, обладающего заданной импульсной характеристикой (33).
Теория электрических цепей устанавливает однозначные соотношения между импульсной g(t) и частотной K(f) характеристиками. Поэтому по заданной импульсной характеристике g(t) можно найти соответствующую ей частотную характеристику K(f) и постараться сконструировать частотно-избирательный фильтр с необходимой характеристикой K(f). Если перейти от описания заданного сигнала в виде функции времени s(t) к описанию этого же сигнала с помощью его частотного спектра 5(f), то правило определения оптимальной частотной характеристики согласованного с заданным сигналом фильтра оказывается очень простым: амплитудно-частотная характеристика фильтра K(f) должна совпадать с амплитудно-частотным спектром сигнала
S(f) (рис. 82, а), а фазо-частотная cp(f)—с зеркальным отображением фазо-частотного спектра сигнала <ps(f) (рис. 82, б).
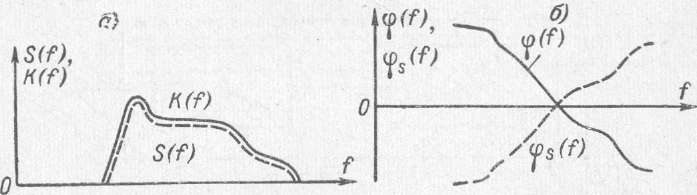
Рис. 82. Амплитудно-частотный (а) и фазо-частотный (б) спектры заданного сигнала (штриховые линии) и характеристики согласованного с ним фильтра (сплошные линии).
Достаточно общий путь синтеза оптимальных фильтров по заданным частотным характеристикам открывает та же теорема В. А. Котельникова. На этот раз ее можно применить для определения необходимой точности аппроксимации заданных характеристик K(f) и cp(f) конечным числом отсчетов и составить оптимальный фильтр в виде набора параллельно работающих узкополосных частотных фильтров, в сумме обладающих нужной характеристикой.
Схема фильтра, основанного на этом принципе, показана на рис. 83.
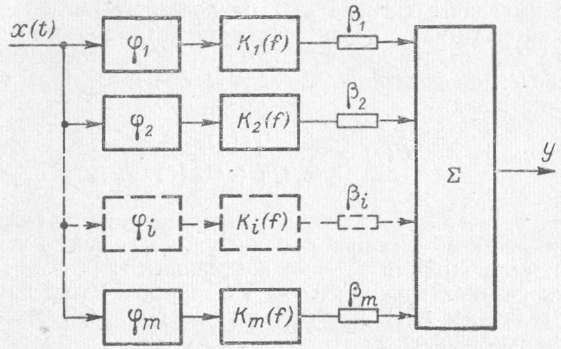
Рис. 83. Схема оптимального фильтра в виде многоканального частотного анализатора.
Он состоит из ряда каналов одинаковой структуры, выходы которых суммируются устройством 2. Каждый канал включает в себя узкополосный частотный фильтр Ki(f), выделяющий узкую элементарную полоску частот, в пределах которой можно пренебречь частотной зависимостью спектра фильтруемого сигнала. Необходимый весовой коэффициент, соответствующий отсчету амплитудно-частотного спектра сигнала в районе этой полоски, обеспечивается выбором нужного значения коэффициента передачи весового элемента (5і. Требуемое значение фазы для каждого канала реализуется при помощи фазовращателя ср.-, введенного в данный канал. Элементарные частотные полоски всех т каналов сдвинуты одна относительно другой так, что в целом фильтр на рис. 83 перекрывает всю заданную полосу частот.
Таквй фильтр подобно фильтру с линией задержки является пассивным и создает на выходе у максимальный отклик на заданный сигнал всякий раз, когда этот сигнал поступает на его вход, без какой-либо синхронизации. Структура этого фильтра интересна еще и тем, что допускает решение другой, несколько более общей задачи оптимальной фильтрации.
В телекоммуникационных системах чаще всего передаются сигналы, заранее неизвестные на приемном конце. К тому же ассортимент передаваемых сигналов зачастую безграничен. Это не позволяет ограничиваться задачей оптимального обнаружения известного сигнала, и более важной оказывается задача наилучшего выделения из помех любого возможного сигнала. Если, с одной стороны, совокупность всех возможных полезных сигналов не предопределена и, с другой стороны, характеристики помех не известны, то такую задачу решить нельзя. Но несмотря на то, что заранее неизвестны конкретные реализации возможных сигналов и помех, часто удается составить некоторые статистические их описания. В качестве таких статистических описаний могут быть взяты осредненные энергетические спектры полезного сигнала G,(f) и помех Gn(f), характеризующие спектральные плотности мощности на различных частотах f. Если, далее, принять в качестве критерия оптимальности фильтра среднеквадратичное отклонение выходного сигнала y(t) от полезного сигнала s(t), то амплитудно-частотная характеристика оптимального фильтра, сводящего это отклонение к минимуму, т. е. обеспечивающего воспроизведение полезных сигналов с наименьшей ошибкой, должна иметь вид:
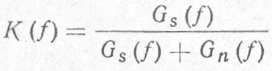 (38)
(38)
Очевидно, реализовать любую характеристику, рассчитанную таким способом, можно при помощи уже описанного устройства (рис. 83), если выбрать весовые коэффициенты |3; элементарных частотных каналов такими, чтобы их значения были пропорциональны величине K(f) на частотах, соответствующих средним частотам этих каналов.
Решение
(38) задачи оптимальной фильтрации по
минимуму среднеквадратичной ошибки
воспроизведения полезного сигнала
справедливо в условиях не только белого
шума, у которого спектральная плотность
Gn(f)
одинакова
на всех частотах, но и при шумах с
неравномерным спектром. В то же время
в отличие от рассмотренных выше фильтров
здесь даже при белом шуме оптимальная
частотная характеристика зависит от
отношения сигнал-шум. Действительно,
когда мощность шума мала (на всех
чэстотзх
![]() ),
можно
пренебречь вторым слагаемым в
знаменателе правой части равенства
(38), и коэффициент передачи оптимального
фильтра в пределах полосы W
частотного
спектра сигнала оказывается постоянным
(кривая 1 на рис. 84).
),
можно
пренебречь вторым слагаемым в
знаменателе правой части равенства
(38), и коэффициент передачи оптимального
фильтра в пределах полосы W
частотного
спектра сигнала оказывается постоянным
(кривая 1 на рис. 84).
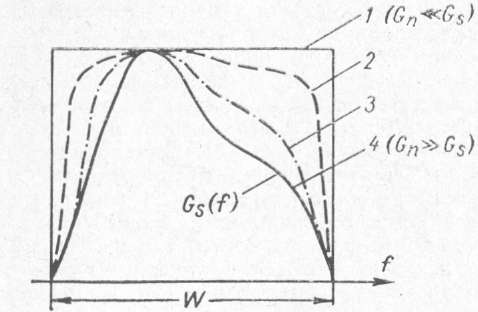
Рис. 84. Энергетический спектр полезного сигнала Gs(f) и оптимальные по критерию минимума среднеквадратичной ошибки воспроизведения сигнала частотные характеристики фильтра при помехе в виде белого шума.
По мере увеличения мощности шума при неоднородном спектре Gs (/) полезного сигнала оптимальная частотная характеристика становится все более неравномерной (2, 3 на рис. 84) и при Gn >Gs принимает форму, совпадающую с формой энергетического спектра сигнала, так как теперь уместно пренебречь первым слагаемым в знаменателе правой части (38).
На этом мы закончим знакомство с основными идеями оптимальной фильтрации и в заключение отметим вырастающую из этой области задачу адаптивной фильтрации.
Как и в автоматических системах оптимального управления, для определения параметров оптимальных фильтров требуется обширная предварительная информация, от полного знания точного вида временной функции s(t), описывающей полезный сигнал, и характеристик помех, до абсолютного значения напряже- шія сигнала, без чего нельзя выбрать правильный порог решающего устройства. Несколько меньшая информация достаточна для реализации оптимального фильтра по критерию минимума среднеквадратичной ошибки воспроизведения полезного сигнала. Но и этот фильтр, значительно уступающий по помехоустойчивости согласованному, оказывается вовсе неэффективным, если неизвестны статистические спектры сигнала и помехи и отношение их мощностей. Реальные же условия радиоприема лишь в редчайших случаях бывают стабильными и заранее известными. Как правило, одно и то же радиоприемное устройство используется для приема различных как по спектрам, так и поуровню радиосигналов, на различных частотах широкого диапазона, при самых разнообразных помехах. Поэтому описанные оптимальные фильтры лишь в редких случаях могут быть эффективно применены для повышения помехозащищенности радиоприемных устройств, если не предусматриваются дополнительные средства для их перестройки. Ручная перенастройка таких систем чрезвычайно сложна и трудоемка и, как правило, не может быть поручена оператору. Поэтому актуальнейшей задачей, стоящей на пути внедрения методов оптимальной фильтрации в практику, является создание автоматически приспосабливающихся к изменяющимся ситуациям фильтров с быстродействующими устройствами адаптации.
Лекция
Адаптивные фильтры
Задача адаптивной фильтрации очень молода и еще не имеет единой общепринятой постановки. Существует лишь небольшое число работ, посвященных решению некоторых частных задач, порою весьма разнородных по содержанию и практической ценности. К области адаптивной фильтрации относят разработку самонастраивающихся решающих устройств в системах обнаружения сигнала на фоне помех; в типичном случае такая задача сводится к автоматической установке порога решающего устройства в зависимости от отношения сигнал-помеха и желаемого соотношения Между вероятностями ошибок различного рода (пропусками и ложными тревогами). В других случаях адаптивными фильтрами считают устройства оптимальной фильтрации, например корреляционный обнаружитель типа показанного на рис. 81, когда значение некоторого параметра, скажем, момента запуска генератора эталонного сигнала (синхронизация), подстраивается с помощью автоматической системы, анализиру- щей принимаемый сигнал. К адаптивным фильтрам по аналогии с одним из классов самонастраивающихся систем автоматического управления относят и такие устройства, в которых считаются неточно известными истинные характеристики самого фильтра, но известны желаемые, причем организуется подстройка фильтра под характеристики его модели (по типу устройства со структурной схемой па рис. 43). Однако наиболее интересными для техники связи должны быть адаптивные фильтры, процесс оптимизации которых направлен на наилучшее согласование их характеристик со свойствами фильтруемых сигналов и сопровождающих эти сигналы помех, так как именно эти переменные чаще всего изменяются в наиболее широких пределах, труднее всего предсказываются и в то же время оказывают самое сильное влияние на качество приема информации.
В любом случае адаптация рассматривается как процесс, организуемый на основе автоматического выявления и учета дополнительных сведений, отсутствовавших при изготовлении фильтра. Заранее неизвестными параметрами сигнала и помех могут быть их интенсивности, вид функции s(t), полоса частот W полезного сигнала, спектры Gs(f) и Gn(f) и т. д. В качестве подлежащих оптимизации параметров фильтра могут выступать весовые коэффициенты аг в схеме на рис. 80 или рі на рис. 83, отсчеты сигнала s(t), создаваемого ГЭС, и период интегрирования Т в схеме на рис. 81. Общепринято утверждение, что полный отказ от учета каких-либо априорных сведений о сигнале и помехах исключает возможность разумной постановки и эффективного решения задачи адаптивной фильтрации, так что проблема сводится лишь к большему или меньшему сокращению объема априорной информации, которая требуется для построения оптимального фильтра. Но и в такой постановке задача адаптивной фильтрации в вариантах, интересных для практики, оказывается достаточно сложной.
Иногда в работах по адаптивной фильтрации заранее предполагают, что необходимые сведения о входном воздействии (функция s(t), закон распределения помехи или спектры сигнала и помех) могут быть каким-то способом получены и сосредоточивают внимание лишь на процедуре подстройки параметров фильтра под оптимальные в соответствии с формулой (33) или (38). В таком виде решение задачи не встречает принципиальных трудностей и вписывается в известные способы автоматического управления. Но при этом оказывается за бортом основная проблема адаптивной фильтрации — путь устранения априорной неопределенности, т. е. выявления недостающих сведений о входном воздействии до того, как будет организована его эффективная фильтрация. По существу же вопрос стоит так: зная о сигнале и помехах очень мало, следует воспользоваться весьма недостоверными сведениями, получаемыми с помощью плохо настроенного фильтра, для улучшения его характеристик с целью получить более достоверные сведения о полезном сигнале. Как ни парадоксально звучит подобная постановка вопроса, она не лишена смысла и уже привела к разработке нескольких интересных решений.
На рис. 85 приведена схема адаптивного фильтра, приближающегося к оптимальному при обнаружении неизвестного повто ряющегося сигнала на фоне шума.
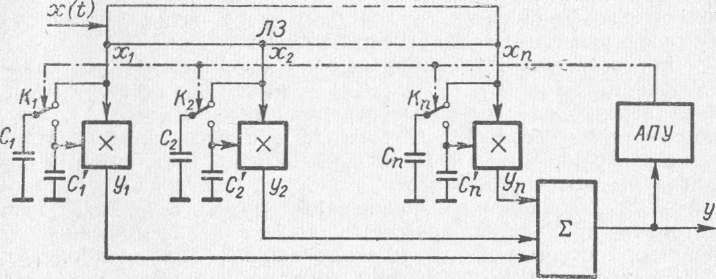
Рис. 85. Схема адаптивного фильтра — обнаружителя неизвестного повторяющегося сигнала.
Подобно оптимальному фильтру на рис. 80, устройство включает в себя линию задержки ЛЗ, вдоль которой происходит пространственная развертка входного сигнала x(t), так что напряжения хи х2, ..., хп, снимаемые с ее отводов, соответствуют взятым в обратном порядке последовательным отсчетам мгновенных значений сигнала x(t) с интервалами т, равными времени задержки между соседними отводами линии. Вместо присутствующих в оптимальном фильтре (рис. 80) весовых сопротивлений а, в адаптивном фильтре поставлены перемножители, обозначенные на рис. 85 знаком «X». По мере адаптации фильтра коэффициенты, на которые каждый перемножитель умножает снимаемое с ЛЗ напряжение Хі, должны стремиться к значениям, пропорциональным оптимальным весам cti. Выходы yi всех перемножителей суммируются устройством 2, и таким образом формируется выходной сигнал фильтра у. Остальные элементы схемы на рис. 85 относятся к устройствам адаптации и образуют три системы: запоминания совокупности отсчетов входного сигнала x(t) (эту систему образуют конденсаторы Си С2, ..., Сп), запоминания весовых коэффициентов аі (представленные в виде напряжений, они хранятся с помощью конденсаторов С'и С'г, ..., С'п) и систему коррекции этих коэффициентов (к ней относятся переключатели Kl, К2, ■ ■., Кп и адаптивное пороговое устройство АПУ)
Идея работы адаптивного фильтра основана на том, что в отсутствие организованного повторяющегося сигнала любые сочетания мгновенных значении напряжения на отводах J13 под действием шума n(t) равновероятны. При наличии же повторяющегося сигнала s(t) одной и той же формы определенная комбинация значений {*,} будет возникать чаще других. В связи с этим задача адаптации сводится к обнаружению моментов, когда возникает специфическое, повторяющееся чаще других распределение отсчетов {хі}, и к осреднению каждого из отсчетов Хі, измеряемых на отводах JI3 в эти моменты. Тогда, несмотря на случайные отклонения каждого измерения Хі от соответствующего значения Si из-за наличия шума, осредненныс по достаточному числу реализаций значения X; со временем будут приближаться к Si и могут быть использованы в качестве весовых коэффициентов а,- для близкого к оптимальному обнаружению ранее неизвестного сигнала s(/).
Для реализации такой процедуры запоминаемые на конденсаторах отсчетов (Си С2, ..., С„) значения xt, х2, ..., хп могут быть перенесены с помощью переключателей К\, /С2, ■ ■ ■, Кп на конденсаторы весов (С'ь С'2, ..., С'„), подключенные ко вторым входам перемножителей. Надо применить автомат, который переводил бы эти переключатели в нижнее положение всякий раз, когда в JI3 попадает обнаруживаемый сигнал. В качестве такого автомата приходится применять далеко не совершенное устройство, способное допускать много ошибок. Такое устройство — АПУ—присоединено к выходу фильтра и срабатывает всякий раз, когда выходной сигнал у превысит некоторый порог. Если входной сигнал x(t) содержит только шум n(t), то моменты срабатывания АІ1У будут совершенно случайными и передаваемые при этом на конденсаторы весов напряжения с конденсаторов отсчетов будут тоже случайными. В результате весовые коэффициенты будут случайно флуктуировать, оставаясь в среднем близкими к нулю. При наложении на шум обнаруживаемого сигнала вероятность срабатывания АПУ возрастает в связи с увеличением энергии входного воздействия, а следовательно, и суммарного напряжения у. Чем выше отношение сигнал-шум, тем вероятнее срабатывание АПУ в моменты появления обнаруживаемого сигнала. Но и при небольших отношениях сигнал-шум АПУ несколько чаще будет переводить переключатели в положение переноса отсчетов па конденсаторы памяти, когда появляется сигнал, чем в моменты его отсутствия. Это приведет к появлению сдвигов средних значений весов в сторону оптимальных значений и увеличит частоту правильных срабатываний АПУ, так как начнет возрастать отклик фильтра на выявляемый сигнал. Процесс адаптации ускорится. Для одновременного уменьшения случайных срабатываний АПУ под действием шума в интервалы, когда обнаруживаемый сигнал отсутствует, выгодно порог срабатывания АПУ сделать адаптивным — повышающимся с увеличением отклика фильтра на обнаруживаемый сигнал Это достигается при помощи схемы, показанной на рис. 86. Сравнивающее устройство (СУ) срабатывает, когда напряжение у на одном его входе превысит напряжение Ua на другом, и переводит ключи К1, Кг Кп в нижнее по схеме (рис. 85) положение. Одновременно замыкается ключ К в схемесамого АПУ, причем напряжение у подается через сопротивление R\ к конденсатору С и осуществляет его подзаряд. Таким образом, пороговое напряжение Un после каждого срабатывания СУ несколько возрастает. Это помогает в процессе адаптации автоматически повышать порог АПУ. Для того чтобы в результате одних случайных срабатываний от шума или по окончании наблюдения за данным сигналом s(t) работа системы не нарушалась вследствие сохранения высокого порогового напряжения Un, оно должно после каждого срабатывания СУ постепенно снижаться. С этой целью конденсатор С на рис. 86 за- шунтирован сопротивлением R3. Частота срабатывания АПУ в отсутствие повторяющегося сигнала зависит от начального порогового напряжения, которое задается делителем из сопро тивлений R2, R3, присоединенным к потенциометру Rt. С его помощью можно устанавливать благоприятное начальное значение порога.
тивлений R2, R3, присоединенным к потенциометру Rt. С его помощью можно устанавливать благоприятное начальное значение порога.
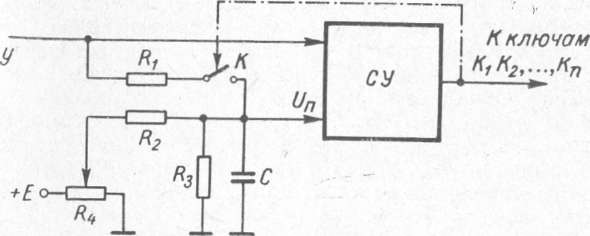
Рис.
86. Схема адаптивного порогового
устройства.
Взаимодействие всех описанных частей адаптивного фильтра приводит к тому, что, когда во входном воздействии x(t) нет повторяющегося сигнала s(t), происходят случайные срабатывания АПУ, средние значения весов (напряжений на конденсаторах С'ь С'г, ..., С'п) остаются нулевыми, и порог Un в схеме АПУ сохраняет низкое значение. При появлении повторяющегося сигнала процент случайных срабатываний АПУ постепенно уменьшается, напряжения на конденсаторах весов стремятся к значениям отсчетов Si повторяющегося сигнала, пороговое напряжение Uп возрастает и отклик фильтра у стремится к оптимальному, приобретая максимальные значения в моменты прихода данного сигнала s(t).
Описанный адаптивный фильтр позволяет не только обнаруживать заранее неизвестный сигнал, но и воспроизводить его форму. Действительно, так как в результате адаптации весовые коэффициенты О.І сходятся к последовательности отсчетов Si обнаруживаемого сигнала, становится известной его форма с точностью до числа п отсчетов, представленных напряжениями на конденсаторах С\, С"2, ..., С'п. Все устройство выглядит достаточно простым по принципу действия, но не в отношении теоретических проблем его описания или возможностей его практической реализации. Трудными для технического воплощения оказываются перемножители, число которых (я) может составлять сотни (я должно равняться базе самого «длинного» из обнаруживаемых сигналов, например, для сигнала длительностью в 0,1 сек при полосе 3 кгц величина 2 WTC=2 ■ 30.00 • 0,1 =600). Что же касается теоретических проблем, то до сих пор отсутствует строгое обоснование сходимости процесса адаптации при произвольных интенсивно- стях сигнала и шума. Эксперименты показывают, что при высоких отношениях сигнал-шум адаптация протекает очень быстро и практически со второй-третьей реализации сигнала фильтр может вести себя как оптимальный. С уменьшением отношения сигнал-шум время адаптации, в особенности на первой стадии «схватывания» сигнала, возрастает, но даже при отношении порядка единицы с течением времени фильтр приближается к оптимальному. При очень низких отношениях сигнал-шум фильтр долгое время может совсем «не замечать» повторяющегося сигнала. Заметное влияние на «схватывание» сигнала оказывает соотношение между средним периодом его повторения и постоянными времени схемы АПУ, а также выбор начального значения порога, статистические характеристики шума, база сигнала и число отводов JI3. Упомянутые параметры, обнаруживаемых сигналов и сопровождающих их помех следует относить к числу характеристик, априорное знание которых необходимо для успешной реализации рассмотренного класса адаптивного фильтра.
Второй пример адаптивного фильтраотносится к другому классу устройств, по-видимому, наиболее перспективных для техники связи,— к классу, основанному на так называемых непараметрических методах адаптации. Идея этих систем заключается в том, чтобы использовать априорные сведения о сигналах и помехах с целью выработки такого критерия качества работы фильтра, значение которого можно определить путем анализа принимаемых сигналов. Наличие такого критерия позволяет строить адаптивный фильтр в виде самонастраивающейся автоматической системы экстремального типа по блок-схеме, аналогичной рис. 42. В этом случае оптимизатор отыскивает настройку фильтра (САУ на рис. 42), соответствующую наилучшему значению заданного критерия качества (оценку этого значения осуществляет блок оценки качества БОК) ■
Основная трудность создания адаптивных фильтров этого класса заключается в изыскании эффективных критериев качества. Критерии, известные в теории оптимальных фильтров, здесь, как правило, не приемлемы, так как они опираются на слишком полную априорную информацию о сигнале и помехах, наличие которой делает задачу адаптивной фильтрации неактуальной. С другой стороны, если необходимый критерий найден, то открываются пути решения куда более общей задачи, чем, например, обнаружение повторяющегося сигнала фиксированной формы.
А. М. Бонч-Бруевичем [9] предложен адаптивный фильтр, позволяющий оптимизировать радиоприемное устройство телеграфных (двоичных) сигналов. В основу критерия качества кладутся сведения о соотношении вероятностей передачи единицы р(1) (посылки) и нуля р(0) (паузы). Для многих телеграфных кодов это соотношение заранее известно.
Для простоты примем
р(1) = р(0) = 0,5, (39)
что характерно для равномерных кодов (например, кода Бодо) с равновероятной передачей всех символов.
Обнаружить появление на выходе приемника единицы или нуля можно с помощью порогового устройства (ПУ на рис. 87) с порогом Uменьшим напряжения г/(1), соответствующего приему телеграфной посылки.
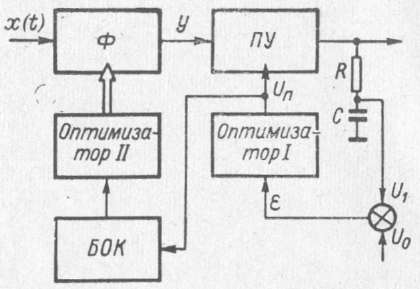
Рис. 87. Схема адаптивного фильтра с настройкой по экстремуму оптимального значения порогового напряжения U„.
Естественно, что при выполнении условия (39) приемник, безошибочно воспроизводящий передаваемые сообщения, будет вызывать срабатывание ПУ в течение половины всего времени наблюдения:
2 /(1) = 0,57і, (40)
где 2/(1) обозначает суммарное время пребывания ПУ в состоянии «сработано», а Т — полное время наблюдения. Выяснить какую долю Т составляет величина 2/(1) очень легко выделением постоянной составляющей выходного напряжения ПУ, осуществляемым сглаживающей пульсацию цепочкой RC (ее постоянная времени r=RC определяет время наблюдения Т).
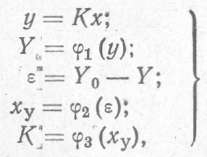
Таким образом, поиск характеристик фильтра Ф, оптимальных с точки зрения наиболее достоверного воспроизведения телеграфного сигнала, можно было бы подчинить выполнению условия (40), отклонение от которого оценивается с помощью узлов ПУ и RC. Однако более эффективную процедуру можно организовать, если дополнительно учесть, что по мере приближения характеристик фильтра к оптимальным должно возрастать напряжение у( 1), создаваемое на его выходе телеграфными посылками. При этом само пороговое напряжение Un, отвечающее условию (4Q), должно также увеличиваться, и его максимальное значение соответствует оптимальной характеристике фильтра Ф. Этот критерий качества и положен в основу описываемого адаптивного фильтра.
Как и в фильтре на рис. 85, здесь осуществляется одновременная оптимизация двух устройств: собственно фильтра и порогового устройства. Но если раньше оптимизация собственно фильтра (весовых коэффициентов а,) была направлена на выявление точных значений п параметров сигнала, являющегося определенной функцией времени s(t), то теперь удается оптимизацию фильтра (в пределах предусмотренных возможностей его перестройки) подчинить согласованию его характеристик с целым классом телеграфных сигналов, для которых справедливо лишь одно условие (39). Эта оптимизация происходит при непрерывном контроле отношения сигнал-шум на выходе фильтра и обеспечивает его максимизацию.
Процесс адаптации можно представить в виде двух этапов> в действительности протекающих одновременно: установки оптимального порога U„ в соответствии с условием (40) и поиска характеристик фильтра Ф, приводящих к максимальному повышению порогового напряжения. Первую задачу выполняет оптимизатор I, изменяющий пороговое напряжение Un в зависимости от отклонения напряжения Ut на выходе і?С-цепочкн от заданного значения U0, соответствующего условию (40). Эта система представляет собой обычное устройство автоматического регулирования, стабилизирующее выход Uі на заданном уровне при наличии возмущающего воздействия, в роли которого выступают изменения сигнала у. Вторую задачу решает поисковая самонастривающаяся система, которая включает в себя оптимизатор II, вырабатывающий управляющие воздействия ху, и блок оценки качества БОК, организующий работу оптимизатора с целью достижения максимального значения Un.
Мы не будем более детально обсуждать принципы построения каждого из узлов системы и пути их реализации но отметим, что, в отличие от фильтра на рис. 85, в последней схеме возможен широкий выбор структуры и ассортимента настраиваемых параметров фильтра Ф. В частности этот фильтр может быть введен в тракт усиления промежуточной частоты приемника (тогда ПУ должно быть включено после детектора), а структура его может соответствовать схеме на рис. 83, причем оптимизируемыми параметрами будут весовые коэффициенты (5;.
Достижение эффективной работы адаптивного фильтра требует определенного согласования скоростей отработки системы оптимизации порога, поисковых движений и настройки характеристик фильтра. Кроме того, время наблюдения, задаваемое цепочкой RC, должно быть согласовано с темпом телеграфной передачи. Действительно гибкий и успешно действующий при широких вариациях характеристик сигналов и помех адаптивный фильтр должен был бы включать в себя еще несколько систем оптимизации, изменяющих время наблюдения, уставку напряжения Uо, ассортимент подстраиваемых параметров фильтра Ф и т. д. Однако сейчас еще не выработаны подходы к решению таких комплексных задач адаптации, хотя принципиальная возможность их решения не вызывает сомнений, если вспомнить, насколько эффективно справляются с одновременным приспособительным регулированием потрясающего числа взаимосвязанных переменных живые системы.
1
2
3
4
 (19)
(19)