

Комбинированное управление
Дальнейшее улучшение работы автоматических систем достигается применением комбинированного управления, сочетающего принцип компенсации, т. е. управление по разомкнутой схеме, с принципом обратной связи, т. е. управлением по замкнутой схеме. При этом все доступные сведения о характеристиках объекта и возмущающих воздействиях используются для построения разомкнутой цепи управления по возмущению. Остаточные погрешности такого управления обусловлены невозможностью контролировать какие-либо из возмущающих воздействий и неточным знанием характеристик объекта или их нестабильностью. Для устранения этих остаточных ошибок добавляется вторая цепь управления, построенная по принципу обратной связи. Поскольку задача, решаемая этой второй цепью, существенно облегчена и ограничивается снятием небольших остаточных отклонений, качественные показатели системы в целом улучшаются. Можно уменьшить коэффициент усиления в замкнутом контуре, сохранив такие же ошибки, как в отсутствие разомкнутой цепи управления, и это повысит быстродействие. Сохраняя же высокий коэффициент усиления в замкнутом контуре, можно повысить точность системы за счет добавления разомкнутой цепи компенсации возмущений.
Общий вид структурной схемы автоматической системы с комбинированным управлением показан на рис. 36.
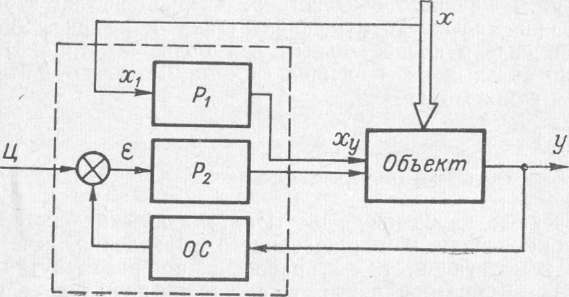
Рис. 36. Структура автоматической системы с комбинированным управлением
Легко
видеть, что такого рода схема получается
из обобщенной схемы адаптивной системы
(рис. 17) путем отбрасывания всего лишь
одной стрелки,
![]() -
При
этом вход х обозначает каналы поступления
возмущающих воздействий. На объект
действует ряд возмущений (стрелка х
двойная), а под контроль разомкнутой
цепи управления (регулятора Р,) берутся
лишь некоторые из них, чаще всего одно
(соответствующая стрелка на рис. 36
изображена одиночной линией).
-
При
этом вход х обозначает каналы поступления
возмущающих воздействий. На объект
действует ряд возмущений (стрелка х
двойная), а под контроль разомкнутой
цепи управления (регулятора Р,) берутся
лишь некоторые из них, чаще всего одно
(соответствующая стрелка на рис. 36
изображена одиночной линией).
Системы комбинированного управления нашли применение и устройствах управления электроприводом, для стабилизации напряжения в силовых установках. Простым устройством такого рода является показанная на рис. 37, б схема стабилизации рабочей точки транзистора в мощном усилительном каскаде.
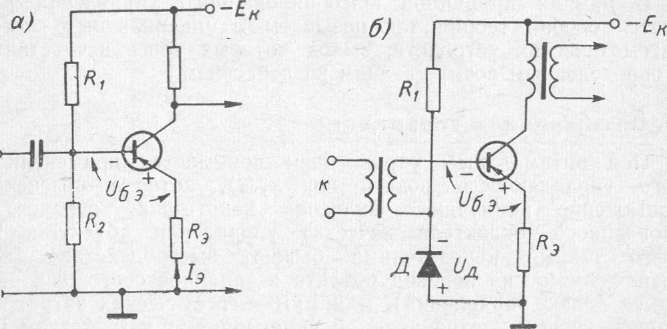
Рис. 37. Схемы стабилизации рабочей точки транзистора: а — за счет обратной связи; б — комбинированная.
В
маломощных каскадах легко получают
высокую стабильность рабочей точки
транзисторов при помощи схемы с тремя
сопротивлениями
(![]() и
R3
на
рис. 37,
а).
В этой схеме величина тока в цепи
эмиттера транзистора
и
R3
на
рис. 37,
а).
В этой схеме величина тока в цепи
эмиттера транзистора
![]() (20)
(20)
где
![]() — коэффициент усиления по току транзистора
в схеме с общей базой; /к0
— обратный ток коллекторного перехода;
Uб.э
— падение напряжения на переходе
омежутке
база — эмиттер;
— коэффициент усиления по току транзистора
в схеме с общей базой; /к0
— обратный ток коллекторного перехода;
Uб.э
— падение напряжения на переходе
омежутке
база — эмиттер;
![]() (21)
(21)
напряжение на нижнем плече делителя, составленного из резисторов
 и
,
в отсутствие нагрузки его током базы;
и
,
в отсутствие нагрузки его током базы;
![]()
ротивление псопараллельного соединения резисторов и R2.
В общем случае различные экземпляры транзисторов вследствие технологического разброса обладают разными значениями параметров , 1К0 и Uб.э. Поэтому и ток эмиттера в схеме на рис. 37, а для разных экземпляров транзисторов может отличаться. Однако, выбирая сопротивления и RЭ так, чтобы выполнялись неравенства:
![]()
(22)
можно сделать ток эмиттера слабо зависящим от индивидуальных параметров транзистора. Действительно, с учетом неравенств (22) соотношение (20) переходит в приближенное:
![]()
где
![]() не зависит от параметров транзистора,
см. формулу (21).
не зависит от параметров транзистора,
см. формулу (21).
Стабилизирующие
свойства схемы на рис. 37,
а
объясняются использованием в ней
принципа обратной связи. Приложенное
ко входу транзистора напряжение
![]() равно разности напряжения, снимаемого
с нижнего плеча делителя R1,
R2,
и
напряжения, выделяющегося на
сопротивлении R3
под
действием проходящего через него тока
эмиттера /э.
Вызванное любой причиной увеличение
тока эмиттера приведет к уменьшению
напряжения Uб-э,
а это, в свою очередь, вызовет уменьшение
тока через эмиттерный переход.
Противоположные процессы противодействуют
уменьшению тока эмиттера.
равно разности напряжения, снимаемого
с нижнего плеча делителя R1,
R2,
и
напряжения, выделяющегося на
сопротивлении R3
под
действием проходящего через него тока
эмиттера /э.
Вызванное любой причиной увеличение
тока эмиттера приведет к уменьшению
напряжения Uб-э,
а это, в свою очередь, вызовет уменьшение
тока через эмиттерный переход.
Противоположные процессы противодействуют
уменьшению тока эмиттера.
Отрицательная
обратная связь, создаваемая резистором
![]() ,
тем
глубже, чем больше его сопротивление,
т. е. чем большая доля полного питающего
напряжения
Ек
падает на нем (чем выше
).
Таким образом, высокая стабильность
достигается ценой потери в цепях
стабилизации значительной мощности.
Это особенно неприятно в мощных
транзисторных каскадах.
,
тем
глубже, чем больше его сопротивление,
т. е. чем большая доля полного питающего
напряжения
Ек
падает на нем (чем выше
).
Таким образом, высокая стабильность
достигается ценой потери в цепях
стабилизации значительной мощности.
Это особенно неприятно в мощных
транзисторных каскадах.
Схема с комбинированным управлением, изображенная на рис. 37, б, свободна от этого недостатка.
Основной
причиной нестабильности рабочей точки
транзистора является температурная
зависимость его параметров, в частности
уменьшение напряжения на эмиттерном
переходе
на 2—3
мв
при повышении температуры на каждый
градус. Такую же температурную зависимость
проявляет падение прямого напряжения
Uд
на полупроводниковом диоде. Поэтому,
заменив резистор
R2
(рис.
37,
а)
полупроводниковым диодом
Д (рис.
37,6), можно неплохо скомпенсировать
влияние температуры на рабочую точку,
обусловленное температурной зависимостью
величины Uб.
э. Конечно, эта компенсация не будет
точной и не уменьшит нестабильности,
вызываемой другими причинами, в
частности индивидуальными отклонениями
параметров транзисторов. Поэтому наряду
с цепью компенсации выгодно сохранить
цепь стабилизации, основанную на обратной
связи (![]() )-
Но глубину обратной связи можно резко
уменьшить и, применяя резистор
с небольшим сопротивлением, предотвратить
чрезмерную потерю мощности в выходной
цепи усилителя.
)-
Но глубину обратной связи можно резко
уменьшить и, применяя резистор
с небольшим сопротивлением, предотвратить
чрезмерную потерю мощности в выходной
цепи усилителя.
В рамках принципов комбинированного управления развивается особая теория так называемых инвариантных систем — автоматических устройств, выход которых вовсе нечувствителен к определенным возмущающим воздействиям.
Лекция