

Задача управления с приспособлением
Все рассмотренные выше автоматические системы в той или иной мере чувствительны к изменениям характеристик объекта управления, внешних воздействий и элементов, используемых в структуре самого управляющего устройства. Некоторые системы (разомкнутые и с оптимальным управлением) вообще не могут быть спроектированы без точного знания этих характеристик, причем весьма незначительные их изменения в процессе эксплуатации могут сделать автоматическую систему вовсе неработоспособной. Замкнутые автоматические системы менее чувствительны к неточному учету характеристик элементов и их изменениям, но достаточно сильные изменения свойств объекта или внешних воздействий также могут приводить к резкому ухудшению качества работы системы и даже к потере ею работоспособности. Между тем, все большее значение начинают приобретать задачи создания систем автоматического управления сложными объектами, характеристики которых либо существенно, порой непредвиденным образом изменяются, либо просто не могут быть заранее выяснены с необходимой полнотой. К такого рода объектам относятся современные самолеты и ракеты, резко изменяющие свои динамические свойства в зависимости от высоты и скорости полета, расхода горючего, обледенения, сложные производственные процессы, управление которыми приходится разрабатывать еще до введения в строй самого завода и т. п. Не менее важны задачи эффективного управления при широких вариациях внешних условий, определяющих задающие и возмущающие воздействия на автоматическую систему.
Во всех этих случаях ставится требование обеспечить лучшее функционирование системы чем то, которое может быть получено на основании недостаточной априорной (заранее известной) информации о характеристиках объекта управления и внешних воздействий. При этом формулируется четкий критерий — показатель качества, по значению которого можно контролировать эффективность работы системы. Поставленные таким образом задачи могут решаться устройствами, способными самостоятельно в процессе эксплуатации извлекать недостающую информацию и корректировать собственные характеристики в направлении, обеспечивающем улучшение заданного показателя качества. По-видимому, в самом общем случае такие системы уместно называть самоприспосабливающимися. Некоторые авторы, учитывая те или иные особенности правил, которым подчинено действие таких систем, применяют различные названия: самооптимизирующиеся, самоалгоритмизирующиеся, самоорганизующиеся, самообучающиеся и т. п. Мы выделим только два класса самоприспосабливающихся систем.
В случае, если недостающая информация может быть выявлена сразу после изготовления всей системы (точные характеристики объекта управления, особенности реального ассортимента входных воздействий), то процесс приспособления необходим лишь в период ввода в эксплуатацию этой системы и в дальнейшем характеристики системы могут оставаться неизмененными (исключая переналадку, которая может потребоваться при замене отдельных узлов, изменении технологических задач или модернизации). Системы, автоматические осуществляющие такое приспособление в течение начального периода работы, назовем обучающимися. Поскольку скорректированные в период обучения характеристики таких систем должны затем неопределенно долго удерживаться без изменений, обучающимся системам должна быть свойственна долговременная память. Эта память как бы позволяет накапливать опыт в процессе обучения и руководствоваться им в дальнейшей работе. Поэтому обучающиеся системы при повторном возникновении одинаковых ситуаций в период обучения реагируют на них по разному, улучшая с течением времени значение показателя качества.
Другой класс самоприспосабливающихся систем необходим в случаях, когда в процессе их эксплуатации могут происходить сильные изменения свойств объекта управления или внешних воздействий в моменты, заранее неизвестные. Тут необходимы непрерывный текущий контроль показателя качества и оперативные перестройки характеристик системы в соответствии с изменяющимися условиями ее работы. Для успешного функционирования таких приспосабливающихся систем предварительное обучение и долговременная память могут не требоваться, и при повторном возникновении одинаковых ситуаций такая система будет действовать одинаково. Но приспосабливая всякий раз свои характеристики к конкретной ситуации, эти системы позволяют поддерживать высокую эффективность работы в различных условиях. Такие приспосабливающиеся системы будем называть самонастраивающимися.
Характерное отличие всех самоприспосабливающихся систем состоит в наличии иерархии управляющих контуров, в простейшем случае — двух (рис. 41).
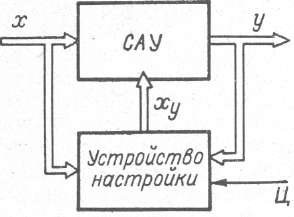
Рис. 41. Обобщенная схема самоприспосабливающейся автоматической системы.
Здесь имеется контур управления основного назначения (САУ) и контур, управляющий характеристиками первого контура С устройство настройки). Таким образом, в роли объекта управления второго контура выступает обычная система автоматического управления. Информация о том, как реагирует САУ на те или иные входные воздействия, поступающая в устройство настройки в виде сигналов х и у, позволяет этому устройству оценивать качество функционирования САУ и осуществлять управляющие воздействия ху< улучшающие работу САУ.
Несмотря на структурное сходство схемы обучающейся системы (рис. 41) с ранее рассмотренными (рис. 36), закономерности ее работы носят новые черты. Ярче всего это проявляется в характере цели функционирования системы. У описанных ранее систем в качестве цели задавались желаемые значения выхода объекта управления. В самоприспосабливающихся системах целью является достижение достаточно хорошего значения некоторого обобщенного показателя качества функционирования САУ путем автоматического изменения характеристик этой САУ. Для решения такой задачи САУ должна содержать изменяемую часть, а устройство настройки включать в себя блок оценки заданного показателя качества (БОК) 'и устройство, управляющее характеристиками изменяемой части САУ (оптимизатор). Эти особенности структуры самоприспосабливающейся системы отражены в схеме на рис. 42.

Рис. 42. Схема самоприспосабливающейся системы с двумя контурами управления / — изменяемая часть основного контура; // — неизменяемая часть.
В общем случае оценка качества работы САУ может производиться путем анализа входных воздействий х, выхода у2 и воздействий у\ со стороны изменяемой части САУ на неизменяемую.
В зависимости от того, каких сведений недостает для разработки эффективной САУ без самоприспособления, в устройство настройки (УН) могут вводиться те или иные сигналы из числаx, yh y2. Так, если эффективная работа САУ при широких вариациях внешних воздействии возможна лишь в случае перестройки ее характеристик в зависимости от этих воздействий, а характеристики самих блоков САУ известны достаточно полно, то в устройство настройки можно вводить информацию только о внешних воздействиях х, а связи БОК с переменными у\ и у2 могут быть опущены.2 Если основные затруднения связаны с невозможностью точно учесть характеристики объекта управления САУ (он входит в состав ее неизменяемой части), то у БОК может отсутствовать вход х, но необходим ввод данных о входных (уі) и выходных (у2) переменных неизменяемой части, так как, анализируя соотношения между этими переменными, можно выяснить истинные свойства объекта управления САУ и согласовать с ними характеристики управляющего устройства, зависящие от изменяемой части САУ.
Каждый из контуров управления, образуемых САУ и УН, может быть построен на принципах управления по возмущению (разомкнутый) или по отклонению (замкнутый), а также на принципе комбинированного управления. Соответственно получаются различные варианты структурных схем самоприспосабливающихся систем. В частности, на рис. 42 основной контур (САУ) показан разомкнутым, а контур настройки — с комбинированным управлением. Если при проектировании конкретной системы конструктор выбирает один определенный показатель качества, например быстродействие САУ, то вход Ц на рис. 42 может быть отброшен, так как выбранная цель функционирования системы закладывается непосредственно в БОК путем соответствующего его устройства. Если же в процессе эксплуатации системы предусматривается изменение или выбор показателя качества (оператором, учителем или автоматически.— при наличии иерархии самоприспосабливающихся систем), то вход Ц должен присутствовать.
Лекция