

Экстремальные снс.
Примером системы, использующей настройку по экстремуму, служит устройство сопровождения радиолокационной цели. На рис. 48 приведена упрощенная схема такого устройства, поясняющая процесс автоматического слежения по углу в одной плоскости, например, за направлением на корабль.
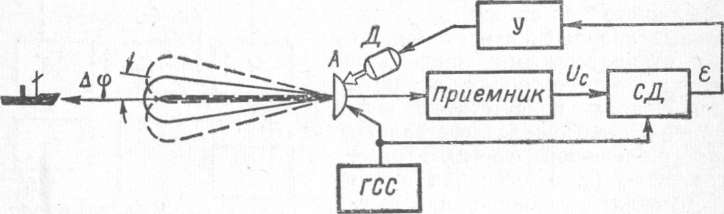
Рис. 48. Схема устройства автоматического слежения за радиолокационной целью.
Задача системы состоит в том, чтобы при наличии цели в поле антенны радиолокатора обеспечить автоматическое слежение за движением этой цели.
Величина отраженного сигнала на выходе приемника радиолокационной станции (РЛС), зависит от угла между направлением на цель и осью диаграммы направленности антенны (Дф на рис. 48). Для точного определения азимута цели и слежения за ее передвижением надо непрерывно совмещать ось антенны с направлением на цель. Для этого в состав РЛС вводится источник поисковых воздействий (генератор сигнала сканирования ГСС), который осуществляет периодическое качание диаграммы направленности антенны в небольших пределах (на угол ±Д<р) в обе стороны от направления, задаваемого электродвигателем Д. Если в исходном состоянии антенна точно направлена на цель, то отраженный сигнал при отклонении диаграммы влево и вправо будет ослабляться одинаково и произойдет модуляция его интенсивности с частотой, вдвое большей частоты сканирования. Если же цель находится чуть правее или чуть левее среднего направления оси антенны, то отраженный сигнал будет модулироваться несимметрично и в его огибающей появится составляющая основной частоты сканирования. При этом фаза модуляции будет зависеть от того, левее или правее среднего направления расположена цель, т. е. определит знак ошибки. Очевидно, синхронное детектирование огибающей сигнала на выходе приемника РЛС с использованием сигнала ГСС в качестве опорного напряжения позволяет выделить компонент отраженного сигнала, несущий информацию об отклонении состояния системы от экстремального, и получить сигнал ошибки е, необходимый для перестройки одного из ее параметров — азимутального направления оси антенны. Эту задачу решает электродвигатель Д привода антенны, на обмотку которого подается усиленный устройством У до необходимого уровня сигнал ошибки е.
Сказанное поясняется рис. 49, на котором показана типичная зависимость напряжения отраженного сигнала Uc от угла Дф между направлением на цель и осью антенны РЛС.
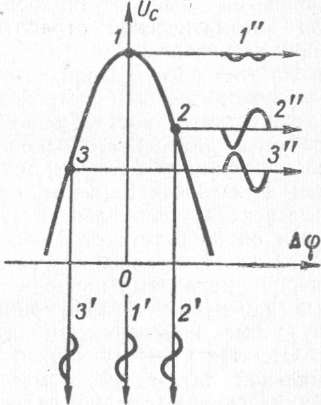
Рис. 49. Зависимость модуляции сигнала от положения рабочей точки на характеристике экстремальной системы.
Она имеет ярко выраженный максимум при Дф=0. Изменения угла Дф при сканировании в трех случаях: цель находится па оси антенны, правее и левее — изображены графиками 1', 2' и 3' соответственно. Изменения интенсивности отраженного сигнала в этих случаях иллюстрируются графиками 1", 2" и З". В первом случае модуляция с частотой сканирования отсутствует, а второй и третий отличаются противоположной фазой модуляции. Это равноценно смене знака амплитуды огибающей отраженного сигнала. Поскольку постоянная составляющая выходного сигнала синхронного детектора, см. формулу (24), пропорциональна произведению амплитуд обоих входных напряжений, то смена знака одного из сигналов приводит к изменению полярности постоянного напряжения на выходе синхронного детектора, что и требуется для автоматической отработки двигателем ошибки в направлении антенны.3
Из этих рассуждений ясно, что синхронный детектор является фазочувствительным устройством. Когда используется свойство фазочувствительности, а не помехоустойчивости (при этом не требуется длительного накопления при помощи фильтра с большой постоянной времени), синхронный детектор называют фазовым детектором. Заметим, однако, что, хотя в схеме на рис. 48 и не показан специальный сглаживающий фильтр, в действительности он присутствует. Роль такого фильтра выполняет, в частности исполнительный двигатель Д, который вследствие большой инерции механизма привода антенны реагирует лишь на медленные изменения сигнала ошибки и, следовательно, сглаживает случайные изменения амплитуды отраженного импульса.
Отсылая интересующихся принципами построения СНС к специальной литературе, отметим, что теория таких систем продвинулась значительно дальше, чем практика их создания, что связано с быстрым усложнением устройств, необходимых для реализации более совершенных принципов самонастройки.
Отметим также некоторые новые принципиальные возможности, открывающиеся при переходе от классических принципов автоматического управления к принципам самонастройки. Наиболее существенное отличие состоит в возможности использовать в качестве цели управления очень широкий ассортимент обобщенных критериев, или показателей качества, вместо отклонения выходной переменной объекта от заданного значения. Показателями качества могут быть любые объективно оцениваемые показатели состояния объекта управления или процессов, протекающих в нем. Так, в случае автоматического управления производственными процессами в роли показателя качества могут выступать такие интегральные характеристики, как себестоимость готовой продукции, производительность, процент бракованных изделий и т. п. Другая очень важная особенность СНС состоит в том, что эффективное управление оказывается возможным, даже если заранее неизвестно, как надо изменять параметры системы для улучшения показателя качества. Такая возможность особенно полезна в задачах управления системами с большим числом изменяемых параметров. Правда, здесь же реализация этой возможности встречает наибольшие трудности, ибо в сочетании с недостаточной априорной информацией о зависимости показателя качества от большого числа параметров при широких вариациях внешних воздействий отыскание наилучшей настройки системы требует перебора невообразимо большого числа вариантов, и время такого перебора может во много раз превышать время, в течение которого происходят изменения, требующие новой перенастройки. В свете таких задач большое значение приобретает начатая совсем недавно разработка методов случайного поиска с самообучением, где во-первых, систематический перебор возможных настроек и поисковых движений заменяется случайным и, во-вторых, параметры и алгоритмы этого поиска на каждом этапе ставятся в зависимость от результатов, достигнутых на предыдущих этапах. По существу, это означает, что над контуром самонастройки параметров основной цепи управления надстраивается еще один контур, оптимизирующий параметры контура самонастройки. Кроме того, для правильного учета системой прошлого опыта самонастройки в нее должны вводиться достаточно емкие запоминающие устройства. Подобного рода системы должны классифицироваться уже как обучающиеся.
Лекция
Адаптация в биологии и технике.
Легко заметить, что в биологическом плане понятие адаптации имеет двойственное значение. Иногда под адаптацией подразумевается просто наличие выработанных тем или иным образом (в результате эволюции или индивидуального опыта) благоприятных приспособлений или способностей, т. е. приспособленность. Так, можно говорить об адаптации в связи с наличием у животного приспособлений для передвижения, согласованностью спектральной характеристики органа зрения с солнечным светом, соответствием набора ферментов роду употребляемой пищи, в связи с выработкой определенных условных рефлексов и т. д. В этих случаях понятие адаптации вполне равноценно понятиям целесообразности или согласованности структуры и образа действия биологического объекта с условиями его существования. Заметим, что соответствующие понятия в технике давно известны и являются непременными критериями конструирования любого полезного устройства. Правда, живая природа еще долго будет демонстрировать инженерам массу решений, по степени целесообразности значительно превосходящих аналогичные технические решения. Вспомним заимствованнные конструкторами пропорции ствола бамбука при строительстве телевизионных башен и еще не воспроизведенные техникой принципы действия мышц, преобразующих химическую энергию в механическую с к. п. д., достигающим 50%. Однако наиболее полнокровным и специфичным для биологических систем понятие адаптации становится, когда внимание сосредоточивается на другой его стороне— на внутренних процессах, которые приводят . к появлению этой целесообразности, к проявлению способности действовать в высшей мере согласованно с конкрет- иыми условиями, т. е. на приспособляемости. Именно этой стороне биологических адаптаций мы старались уделить основное внимание на протяжении всего очерка. Она связана с высокой гибкостью характеристик и способов действия биологических систем. Именно эта сторона адаптивных систем представляет наибольший интерес для техники в связи с настоятельной потребностью автоматизации и повышения «интеллектуальности» сложных устройств, создание которых стоит на повестке дня современной техники.
Таким образом, уместно определить адаптацию как автоматическое изменение характеристик или способа функционирования системы, направленное на повышение ее эффективности.
Для переноса какого-либо принципа из одной сферы в другую необходим промежуточный этап формулировки этого принципа в достаточно общей, абстрактной, форме с исключением тех конкретных его деталей, которые связаны с одной из сфер и в силу физических или химических особенностей оригинала не могут быть сохранены в другой сфере.
Таков путь и бионики, занимающейся изысканием путей совершенствования технических устройств за счет внедрения в них принципов построения и действия биологических объектов. Диалектику бионического исследования можно представить схемой, показанной на рис. 14. Изучение биологического объекта служит накоплению сведений, обобщение которых позволяет предложить абстрактное описание изучаемого принципа. Таким описанием является бионическая модель. Она может представлять собой схематический чертеж конструкции, сохраняющий принципиальные особенности заимствуемой структуры, но уже не требующий использования конструктивных материалов биологической природы и освобожденный от всех несущественных деталей конфигурации биологического оригинала. В других случаях бионическая модель может быть совокупностью математических уравнений, описывающих существенные геометрические соотношения биологического объекта или зависимости между физиологическими переменными. Для бионического подхода к решению задач, характерных для радиоэлектронной техники, наглядны и достаточно продуктивны модели в виде так называемых функциональных схем, приближающихся к широко распространенным в этой области техники блок-схемам.
Функциональные схемы строятся на основе замены всех биологических переменных абстрактными символами, а механизмов, определяющих взаимосвязи между этими переменными,— прямоугольниками и стрелками. Для того чтобы такая схема однозначно выражала действие какого-либо биологического объекта, она должна сопровождаться описанием правил действия каждого функционального узла (блока), которые устанавливают математическую зависимость выходных переменных каждого блока от всех его входов.
Если непротиворечивая бионическая модель построена, то далее на пути бионики остаются чисто технические задачи разработки устройств, выполняющих функции необходимых блоков.
Примером математической модели, правда, весьма грубой, является формула вероятности мутации (1), приведенная нами при описании механизмов эволюции. Действительно, этому же соотношению м'оЖеТ подчиняться и сбвСем иной реальный процесс; например вероятность отказа за время t технического устройства, состоящего из N блоков с однократным резервированием каждого блока (тогда pi и ру должны обозначать вероятности отказа основного и резервного блоков за время Т).
При описании ряда адаптаций мы иллюстрировали причинно- следственные связи в обусловливающих эти адаптации процессах с помощью схем, приближающихся к функциональным моделям. Отсутствие математической расшифровки закономерностей, которым подчинены связи входных и выходных переменных каждого блока, и сохранение конкретного биологического содержания в фигурирующих на таких схемах переменных не позволяет считать их законченными бионическими моделями. По су-
Рис.
14. Схема бионического исследования.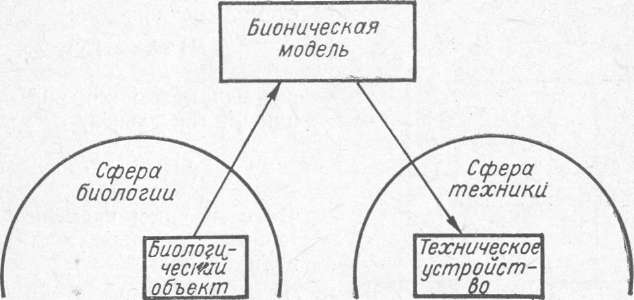
ществу, это первый шаг на пути построения бионических моделей. Но надо сказать, что в переходе от биологического описания к бионической модели и заключена главная проблема бионики. Здесь сосредоточены наибольшие трудности, определяющие основное содержание бионических исследований. Поэтому сейчас и нельзя еще дать описание многих механизмов адаптации на уровне бионических моделей.
Но для более четкого очерчивания круга явлений, подлежащих изучению, наряду со словесным определением адаптации вообще, очень полезно располагать некоторой обобщенной бионической моделью адаптивной системы, отражающей общий принцип функционирования всех систем этого класса.
Вытекающая из широкого обобщения принципов многих известных в биологии адаптивных механизмов функциональная схема такой обобщенной модели приведена на рис. 15.
Собственно адаптивная система представлена двумя блоками: реагирующей частью Ч1, и управляющей частью Ф; третий блок на рис. 15 обозначает среду, с которой взаимодействует адаптивная система и без которой рассуждения об адаптации теряют смысл. Основной характеристикой системы является правило, лежащее в основе выбора ею реакции R на то или иное воздействие S со стороны среды. Изменчивость этого правила отражена наличием управляющего воздействия CD(y) со стороны управляющей части Ф. В различных видах адаптации воздействие Ф (у) МоЖет быть более или менее целесообразным и в общем случае формируется под влиянием внешних условий y таким образом, что со временем улучшается значение некоторого показателя (критерия) качества Q выполнения определенной жизненной функции Ц (цели). Естественно, что для осуществления такого управления часть Ф должна получать информацию о внешних условиях у и о цели Ц. Кроме того, на выбор управляющего воздействия Ф(у) могут влиять сведения о том, какой реакцией R откликается реагирующая часть Ч^ на данный стимул S, что позволит осуществлять текущий контроль критерия качества Q. Соответствующие каналы информации изображены на рис. 15 штриховыми линиями.
Описанные взаимосвязи формализуются следующей системой соотношений:
INCLUDEPICTURE
"../../../DOCUME~1/B935~1/LOCALS~1/Temp/FineReader10/media/image15.jpeg"
\* MERGEFORMAT
![]() (2)
(2)
где
параметры или вид операции![]() так
зависит от условий
так
зависит от условий
INCLUDEPICTURE
"../../../DOCUME~1/B935~1/LOCALS~1/Temp/FineReader10/media/image17.jpeg"
\* MERGEFORMAT
![]() (3)
(3)
что с течением времени t критерий качества достижения цели
INCLUDEPICTURE
"../../../DOCUME~1/B935~1/LOCALS~1/Temp/FineReader10/media/image18.jpeg"
\* MERGEFORMAT
![]() (4)
(4)
в среднем улучшает свое значение, например уменьшается:
INCLUDEPICTURE
"../../../DOCUME~1/B935~1/LOCALS~1/Temp/FineReader10/media/image19.jpeg"
\* MERGEFORMAT
![]() (5)
(5)
Фигурные скобки в формулах обозначают множества, черта сверху — осреднениое в некотором интервале времени значение.
Исследование любого адаптивного механизма, направленное на построение его бионической модели, можно теперь представить как задачу отождествления переменных или функций S, R, v, Ц и Q с главными физико-химическими и биологическими характеристиками данного механизма, нахождение способов математического представления этих характеристик и составление конкретных выражений существующих между ними связей, символически представленных соотношениями (2) — (4). Одновременно возможно уточнение структуры функциональной схемы изучаемого механизма, заключающееся в отбрасывании лишних связей и в детализации блок-схем отдельных частей обобщенной модели (рис. 15).
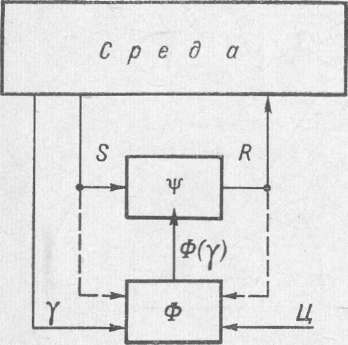
Рис. 15. Обобщенная схема адаптивной системы
Системы, удовлетворяющие условию (5), следует считать адаптивными.
Так, в случае выработки условного рефлекса множество {І?} можно представить одной полезной врожденной реакцией R\ на вызывающий ее безусловный раздражитель Si. Условный раздражитель S2 первоначально не вызывает данной реакции, но, воздействуя на управляющую часть системы как условие (y = S2), приводит к выработке команды Ф(у), изменяющей правило формирования реакции Rі так, что со временем операция Y распространяется и на стимул S2. Если сигнальное значение условного раздражителя S2 отражает закономерности внешней среды и тем самым позволяет повысить приспособленность организма к удовлетворению некоторой жизненной функции Ц, возникшая временная связь сохраняется. Если же характеристики внешней среды изменились и стимул S2 перестал быть предвестником стимула Si, то сохранение реакции Rі на стимул S2 не будет улучшать критерия качества Q выполнения данной функции Ц и условный рефлекс угаснет.
Во многих случаях задачи отождествления переменных и конкретизации выражений (2) — (5) сопряжены с большими трудностями, которые в настоящее время еще нельзя преодолеть.
Одним из наиболее интересных и в то же время наиболее сложных вопросов является составление математического описания критерия качества (4) биологических систем. По-видимому, как правило, этот критерий имеет комплексный характер и охватывает большое число разнородных характеристик, таких, как энергетические затраты, сложность используемых механизмов и их перестройки, скорость достижения результата и его важность и т. п. Есть веские основания считать, что в отличие от классических задач современной теории управления биологические адаптивные механизмы зачастую ограничиваются улучшением значения критерия качества (5) и не достигают экстремального (наилучшего) его значения, что, однако, не мешает биологическим системам весьма эффективно решать многие задачи, пока не доступные техническим устройствам. Видимо, улучшение значения совершенного критерия в этих случаях важнее, чем достижение экстремума простого критерия. Мало того, открытие в мозгу центров удовольствия, непрерывная самостимуляция которых не приводит к пресыщению, наводит на мысль о существовании критериев, значения которых вообще не ограничены [50]. Наличие таких критериев надо считать необходимым для любых эволюционирующих систем с потенциально неограниченным пределом совершенства.
В некоторых пояснениях нуждается и представление о цели Ц. В общем случае эту переменную, или жизненную функцию, нельзя считать заданной извне, как это показано на рис. 15. Если применить схему обобщенной модели к изучению замкнутой совокупности «биологическая система — среда», то «целесообразность» тех или иных форм взаимодействия биологической системы со средой выступает лишь как следствие внутренних закономерностей взаимодействия такого рода систем. Наиболее четко это проступает при анализе движущих сил и путей эволюции живой природы. Здесь вход «Я» на схеме рис. 15 должен быть отброшен. Однако при модельном описании многих частных механизмов адаптации значительно легче формализовать изучаемый процесс, отбросив часть взаимосвязей, определяющих конкретное назначение рассматриваемого механизма (например, механизм мотивации в моделях адаптивного поведения или генетический механизм, передающий целесообразные структуры управления площадью зрачка в результате эволюции), причем цель функционирования данного механизма задается отброшенными частями. Такой прием особенно полезен, если целевое назначение изучаемого механизма ясно осознано исследователем и не изменяется в пределах рассматриваемой задачи (отбрасываемые механизмы сами могут быть адаптивными и вызывать изменения цели). Поэтому введение представления о цели и достаточно глубокое изучение вопросов, связанных с ее формированием, оказывается важным методологическим приемом на определенном уровне описания биологических адаптаций.
Ввод информации о цели функционирования конкретного механизма облегчает также перенос изучаемых принципов адаптаций в технические системы, проектируемые для решения задач, предопределенных техническим заданием.
Отметим, что в моделях частных механизмов адаптаций «среда» включает в себя не только внешнюю по отношению ко всей биологической системе среду, но и те части биологической системы, с которыми данный механизм взаимодействует.
Итак, развитие теории адаптивных механизмов, которыми пронизаны все биологические процессы, должно быть связано с отысканием строгих абстрактных форм описания этих механизмов, с определением ассортимента участвующих в них переменных и конкретного вида функциональных связей между переменными. Во многих случаях преобразования, осуществляемые реагирующей и управляющей частями, требуют учета не только текущих значений стимулов, условий, реакций и критерия качества, но и прошлых их значений, т. е. опираются на память, присущую биологическим системам. Совокупности входных воздействий очень часто принимают форму пусковых стимулов или условий лишь после достаточно сложных и тоже адаптивных преобразований входных сигналов в анализаторных системах, включая операции типа классификации или распознавания образов, ситуаций. Даже в относительно простых ситуациях одновременно участвуют множественные механизмы адаптации, так что общая схема адаптивного процесса складывается из множества схем типа рис. 15, где входы S, выходы R и каналы информации о цели Ц отдельных подсистем переплетаются, образуя сложные, в том числе иерархические, системы.
Современная наука уже подходит к такого рода описаниям адаптивных систем. При этом наиболее продуктивные методы дает приложение к биологическим системам принципов теории автоматического управления и других дисциплин, интенсивно развивающихся после формулировки основных идей кибернетики (теории информации, теории больших систем и т. д.). В свою очередь, такое приложение этих дисциплин к биологическим задачам вскрывает их слабые стороны и стимулирует дальнейшее развитие, которое принесет пользу не только биологии, но и прогрессу техники.
Естественно, что адаптация может быть свойственна только динамическим системам, на которых мы и должны далее сосредоточить внимание.
Действие любой динамической системы можно описать значением одной или нескольких величин, характеризующих наблюдаемые на выходе этой системы результаты. Эти величины изменяются во времени и называются выходными переменными, или просто выходом. Так, выходной переменной колесной повозки является ее положение на поверхности земли, холодильника — температура в камере, радиоприемника — звуковые колебания, создаваемые громкоговорителем и т. д.
Для того чтобы динамическая система функционировала, она должна воспринимать определенные внешние воздействия, называемые входными переменными, или входом. Входной переменной повозки является сила, с которой толкает ее рабочий, холодильника — напряжение питающей электросети, радиоприемника — совокупность напряжений радиосигналов, поступающих из антенны, и напряжение электросети.
Установить непосредственно, как зависит выходная переменная от входной, удается лишь в редчайших элементарных случаях. Как правило, при изучении динамических систем для выяснения этой связи приходится принимать во внимание ряд промежуточных, или «внутренних», переменных, описывающих состояние динамической системы: вращение колес повозки перепад давления в компрессоре холодильника, напряжения в различных цепях радиоприемника и т. п.
Итак, с понятием динамической системы связаны представления о выходах y(t), входах x(t) и состояниях z(t) и математические описания взаимозависимости этих переменных 4. В общем виде динамическая система изображается схематически, как показано на рис. 16.
Рис. 16. Схема динамической системы.
Входная и выходная стрелки нарисованы двойными линиями, чтобы показать, что входов и выходов может быть много.
Легко заметить, что реагирующая часть Ч' в схеме адаптивной системы (рис. 15) может быть уподоблена динамической системе, если стимулы S отождествить с входными воздействиями x(t), а реакции R — с выходными переменными y[t). При этом, однако, динамическая система должна иметь еще дополнительный вход управляющих воздействий (Ф(7) на рис. 15). Обозначив управляющие воздействия символом xy(t), можно перерисовать схему, представленную на рис. 15, в виде рис. 17. Здесь динамическая система названа объектом (управления), обозначения условий y(t) и цели L[(t) сохранены прежние, а блок УУ представляет собой управляющее устройство.
Изучением свойств динамических систем, используемых в качестве объектов управлення, и принципов управления ими занимается особая дисциплина, называемая теорией автоматического управления или, короче, автоматикой. Развивающаяся на основе этой науки отрасль техники, носящая такое же название, в значительной мере связана с разработкой электронных устройств, однако сферы ее приложения непрерывно расширяются в связи с решением задач массовой автоматизации производства и высокой эффективностью использования в управляющих устройствах электронных вычислительных машин.
Основная задача автоматического управления сводится к отысканию, таких управляющих воздействий, или управлений, xy(t), которые обеспечивают желаемое целесообразное поведение выходных переменных y(t) объекта управления. После решения этой задачи осуществляется разработка управляющего устройства УУ, которое автоматически задает необходимое управление на основе той или иной информации, получаемой от объекта или среды, в которой он действует.
Вопрос об адаптивных системах в автоматике начал обсуждаться и разрабатываться лишь в самые последние годы, причем практические достижения в создании систем, называемых самоприспосабливающимися, еще очень скромны. Однако в свете биологических представлений об адаптации как процессе приспособления к изменяющимся внешним условиям такие свойства проявляют многие традиционные устройства, разработанные на основе классических принципов автоматики. Действительно, принимая за основу изображенную на рис. 17 схему адаптивной системы и исключая те или иные связи (линии со стрелками), можно получить ряд более простых систем, многие из которых еще будут придавать объекту управления приспособляемость и в то же время будут соответствовать хорошо известным в автоматике структурным схемам определенных классов автоматических устройств. Идя таким путем, мы познакомимся в этом очерке с рядом типичных автоматических устройств в порядке усложнения их принципов действия и подойдем к постановке проблем создания наиболее совершенных автоматических систем, приближающихся к адаптивным биологическим системам.
Лекция