

Самонастраивающиеся системы
Из всех разновидностей самоприспосабливающихся автоматических систем наибольшего развития в настоящее время достигли самонастраивающиеся, которые не требуют введения в них устройств долговременной памяти и в то же время позволяют резко повысить эффективность автоматического управления различными объектами и технологическими процессами, отличающимися непостоянством параметров и условий. Обобщенная структура самонастраивающихся систем (СНС) соответствует уже рассмотренной схеме (рис. 42), причем перестройки, происходящие в изменяемой части САУ, ограничиваются изменением ее параметров (чаще всего одного, например, коэффициента усиления).
Надо заметить, что некоторые устройства, подпадающие под такое определение самонастраивающихся систем, появились раньше, чем вошло в обиход это название, и по традиции называются просто системами автоматического управления или регулирования. Так, весьма простой самонастраивающейся системой (СНС) можно считать описанные выше системы АРУ «вперед» (рис. 20) и замкнутой АРУ (рис. 35). Действительно, в обоих случаях в роли объекта управления выступает следящая система (усилитель), включающая в себя изменяемую часть — регулятор усиления. Процесс управления заключается в изменении параметра (коэффициента усиления) следящей системы. Целью управления является поддержание уровня выходного сигнала следящей системы вне зависимости от конкретной формы этого сигнала и уровня входного сигнала. Соответственно управляющие устройства на рис. 20 и 35 содержат специальные блоки измерения характеристик сигналов, необходимые для оценки показателя качества,— датчик уровня и фильтры. Наконец, в замкнутой АРУ (рис. 35) имеется устройство, которое оценивает качество работы системы, сравнивая предписанное значение уровня выходного сигнала У0 с истинным У.
Однако для современных тенденций развития СНС характерны более сложные принципы управления параметрами изменяемой части основного контура САУ. Известный ученый в области теории управления и случайных процессов В. С. Пугачев указывает, что отличительной особенностью самонастраивающейся системы должно быть использование критериев качества, содержащих информацию не только о текущих значениях выхода объекта управления, но и о его динамических характеристиках.поскольку именно они должны целенаправленно изменяться контуром самонастройки. Эту мысль иллюстрирует распространенный принцип построения СНС с моделью основного контура управления в цепи самонастройки (рис. 43)
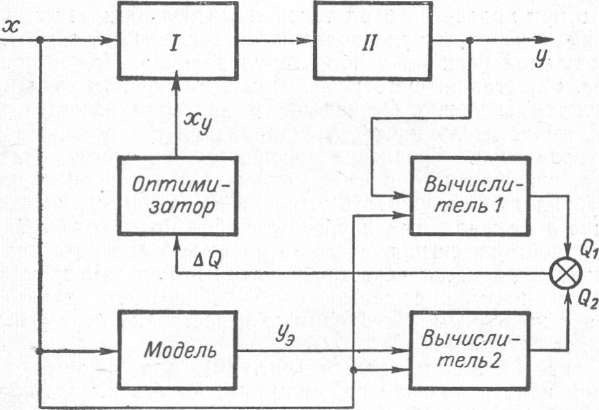
Рис. 43. Схема СНС с моделью основного контура в цепи самонастройки.
.
Основная идея этого типа СНС заключается в том, чтобы удерживать близкими к желаемым динамические свойства основного контура, когда параметры объекта управления, входящего в неизменяемую часть системы,, известны неточно или могут непредвиденным образом изменяться возмущающими воздействиями в процессе работы системы. Желаемую характеристику основного контура моделируют при помощи соответствующего набора простых электрических цепей (динамических звеньев) так, что при подаче на вход такой модели любых задающих воздействий х на ее выходе появляются сигналы у3, соответствующие желаемой реакции у объекта управления. При помощи устройства, сопоставляющего реакцию уэ с вызвавшим ее сигналом х, вычисляется значение Q2 заданного критерия качества. Аналогичный вычислитель качества устанавливается в основном контуре управления. Сравнение показателей качества эталонного контура, включающего в себя модель, Q2, и основного контура, Qi, позволяет обнаруживать отклонение динамических свойств последнего от желаемых и образующийся на выходе сравнивающего устройства сигнал рассогласования AQ использовать для организации процесса перестройки параметров изменяемой части основного контура с целью приближения его динамических свойств к желаемым. Необходимую перестройку параметров осуществляет оптимизатор.
На рис 43, как и прежде (рис. 42), для упрощения схемы основной контур показан разомкнутым, но без каких-либо принципиальных изменений в работе устройства он может быть построен и по принципу управления с обратной связью. Для этого достаточно на вход изменяемой части / подавать не задающее воздействие х, а сигнал рассогласования е, получаемый в результате сравнения воздействия х с сигналом обратной связи от выхода у объекта управления.
Сравнивая схемы на рис. 43 и 42, легко усмотреть, что совокупность узлов модель, вычислитель 1, вычислитель 2 и сравнивающего устройства представляет собой конкретную структуру блока оценки качества обобщенной схемы.
Примером применения принципа самонастройки по модели служит устройство самонастраивающегося автопилота самолета (рис. 44). Автопилот предназначен для автоматического, без вмешательства летчика, управления полетом самолета. На рис. 44 изображен один канал автопилота, служащий для управления самолетом в продольном направлении (по высоте). Задающий сигнал для автопилота вырабатывается гироскопическим устройством ГУ, сравнивающим истинное направление полета самолета (выходную переменную САУ) с направлением, заданным летчиком с помощью соответствующей рукоятки потенциометрической схемы. Сигнал ошибки усиливается усилителем У до величины, достаточной для приведения в действие рулевой машинки РМ, которая управляет рулями высоты. В расчете на неизменные динамические свойства самолета можно так выбрать параметры усилителя (коэффициент усиления, частотную характеристику), что при всяком отклонении самолета от заданного направления автопилот быстро и с наименьшей суммарной погрешностью будет возвращать его на заданный курс. Однако сильные изменения условий полета, зависящие от скорости, высоты, изменения нагрузки самолета, обледенения, приводят к тому, что на одинаковые управляющие воздействия самолет может реагировать по- разному. Иначе говоря, зависимость выходной переменной от управляющего воздействия непостоянна. Поэтому отклонения определяющих эту зависимость динамических характеристик самолета от расчетных приводят к ухудшению качества управления при фиксированных параметрах управляющего устройства.

Рис. 44. Упрощенная схема самонастраивающегося автопилота.
Для автоматической подстройки параметров автопилота под изменяющиеся характеристики самолета используется контур самонастройки с эталонной моделью.
Модель представляет собой электрическую цепь, создающую такой же выходной сигнал, какой должен появляться на выходе измерителя реакции самолета (ИР) при условии, что динамические свойства самолета соответствуют расчетным. Выходы обоих этих устройств сравниваются и, если истинные характеристики самолета отличаются от расчетных, на выходе сравнивающего устройства появляется сигнал рассогласования Д. Этот сигнал поступает в анализатор, задача которого выяснять, как надо изменить параметры основного контура управления для того, чтобы система в целом (автопилот+самолет) продолжала сохранять желаемые свойства, несмотря на изменения характеристик одной из ее частей (самолета). Вырабатываемые анализатором сигналы поступают на оптимизатор, который изменяет необходимые параметры усилителя У в основном контуре управления.
Самонастраивающиеся системы зачастую удается строить так, что оптимизирующее устройство в любой момент целенаправленно изменяет параметры основного контура управления, приближая их к оптимальным значениям. Такая возможность появляется, когда отличие истинного значения показателя качества от желаемого (на выходе модели) однозначно указывает необходимое направление изменения параметров. В более сложных случаях заданный показатель качества может иметь такую природу, что по его текущему значению нельзя определить благоприятного направления изменения параметров: требуются пробные или, поисковые, изменения параметров в разных направлениях. Использующие этот принцип СНС называются поисковыми.
Идея поисковых СНС основана на введении автоматического опробования возможных вариантов характеристик основного контура управления, оценке соответствующих значений показателя качества и выборе того варианта, который обеспечивает лучшее значение показателя качества.
Предложено много модификаций структурных схем поисковых СНС, методов организации поиска и способов оценки наилучшего (экстремального) значения показателя качества в таких системах. Наиболее простыми по логике работы являются системы с последовательным опробованием небольшого ассортимента предусмотренных характеристик основного контура и запоминанием лучшего варианта. Их действие напоминает выбор благоприятного звучания радиоприемника, снабженного клавишным переключателем тембра, когда, настроив приемник на ка- кую-либо радиостанцию, радиослушатель поочередно нажимает клавиши «музыка», «речь», «бас» и т. д. и в конечном счете останавливается на той, при нажатии которой качество звучания кажется ему наиболее благоприятным. Легко сообразить, что выполнение этой процедуры требует запоминания показателя качества всех опробованных вариантов до окончания процедуры поиска и наличия специального программного устройства, задающего программу опробования (поиска). Структурная схема, поясняющая работу таких систем, показана на рис. 45.

Рис. 45. Схема поисковой СНС.
Основной контур управления представлен в виде двух частей: изменяемой (/) и неизменяемой (II). Изменение параметров части I осуществляется исполнительным устройством ИУ под действием команд, поступающих на него от программного устройства ПУ. Блок БОК осуществляет измерение заданного показателя качества, причем полученные его значения вводятся в запоминающее устройство ЗУ. Оно содержит столько ячеек памяти, сколько предусмотрено различных вариантов характеристик блока I. В соответствии с поступающей от ПУ информацией N о том, какой из вариантов в данный момент испытывается, запоминание значения показателя качества Q происходит в отведенной для этого варианта ячейке ЗУ. По окончании цикла опробования от ПУ поступает команда на сравнивающее устройство СУ, которое определяет, в какой ячейке ЗУ хранится наилучшее значение показателя качества, и сообщает соответствующий номер N опт варианта программному устройству. После этого ПУ подает на ИУ команду на установку соответствующего варианта характеристики блока / и прекращает работу цепей самонастройки.
Поскольку с течением времени, вследствие изменения характера внешних воздействий, выбранная настройка основного контура может стать неоптимальной, процедуру самонастройки надо время от времени повторять. Это может осуществляться по команде, вводимой в ПУ извне, или с помощью автоматического датчика пусковых сигналов, предусматриваемого в составе программного устройства.
Осуществление поискового принципа самонастройки так или иначе связано с дополнительными воздействиями на САУ. Эти воздействия, называемые поисковыми, в рассматриваемой системе представляют собой переключения цепей в блоке /, в результате которых изменяются характеристики основного контура. Они неизбежно сказываются на качестве работы САУ, изменяя выход у даже при неизмененном задающем воздействии х. По окончании цикла поиска возмущающее влияние поисковых воздействий прекращается. Однако фиксация определенной характеристики основного контура оборачивается прекращением слежения за качеством действия САУ (до момента очередной самонастройки). Поэтому более совершенные СНС строятся по принципу непрерывного поиска, совмещаемого с рабочим режимом системы. Но при этом допустимы лишь небольшие поисковые воздействия, возмущающее действие которых не выводит выходную переменную за пределы допустимых отклонений. Особая задача, которая возникает в таких устройствах, заключается в необходимости эффективного выделения слабого сигнала (реакции основного контура на малое поисковое воздействие) на фоне другого более сильного сигнала (изменений выходной переменной у, обусловленных задающим воздействием х).
Мощным средством помехоустойчивого выделения слабого сигнала в присутствии помех является накопление энергии этого сигнала за счет осреднения результатов многократных измерений. Такая процедура возможна, если выделяемый сигнал существует длительное время или многократно повторяется.
С простейшей формой накопления мы уже встречались в системах АРУ. Усиливаемый сигнал x(t), например, на рис. 20, представляет собой сложное колебание неизвестной заранее формы, а для работы системы АРУ надо знать средний уровень этого сигнала. Здесь усиливаемый сигнал (рис. 46, а) можно представить состоящим из суммы колебаний с постоянной амплитудой, равной среднему значению амплитуды сигнала x(t) (рис. 46,6), и второго сигнала (рис. 46, в), равного разности истинного сигнала и среднего. Для устройства АРУ полезным сигналом является сигнал со средним значением амплитуды (б), а разностный (в) оказывается мешающим, так как его наличие затрудняет оценку среднего уровня. Характерно, что отклонения отдельных амплитуд от среднего значения в противоположные стороны равновероятны. Поэтому, если просуммировать значения большого числа п положительных амплитуд, то сумма Uі + + ІІ2+... *rUп будет очень близка к увеличенной в n раз средней амплитуде:
 (23)
(23)
Такого рода операцию и выполняет датчик уровня в устройстве АРУ.
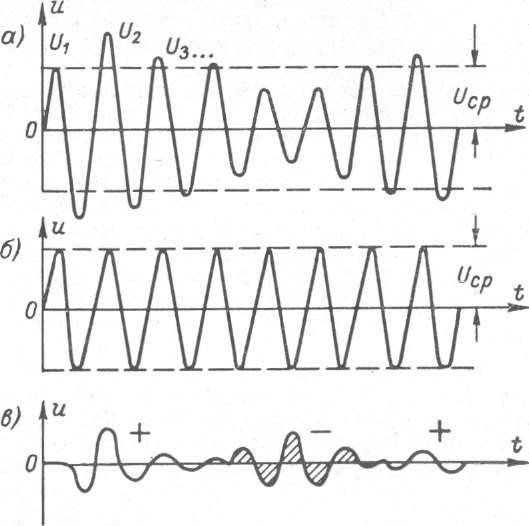
Рис. 46. Разложение сигнала, модулированного по амплитуде (а) на составляющую с постоянной амплитудой (б) и случайную составляющую (в).
Детектор Д (рис. 20) выделяет амплитуды положительных полупериодов сигнала x(t) и подает их на вход сглаживающего фильтра. Фильтр Ф со временем осреднения т создает отклик, получающийся в результате наложения друг на друга откликов, вызванных всеми амплитудами за время, пропорциональное постоянной времени фильтра т. Таким образом, выходной сигнал фильтра пропорционален среднему значению амплитуды сигнала x(t). Иначе говоря, накопление, осуществляемое фильтром, позволяет выделить информацию о полезном сигнале (об амплитуде колебания на рис. 46, б) в присутствии соизмеримой с ним помехи (рис. 46, е). Чем больше время осреднения (число суммируемых отсчетов п), тем лучше выполняется соотношение (23), т. е. тем точнее, с меньшими погрешностями, выделяется полезный сигнал.
Еще большими возможностями обладают устройства с синхронным накоплением, так называемые когерентные и корреляционные обнаружители. Распространенным устройством этого класса является синхронный детектор
Синхронное детектирование применяется в случае, когда надо выделить не постоянное для исследуемого процесса значение какого-нибудь параметра, как это позволяет делать обычный детектор в сочетании с фильтром-накопителем, а некоторый периодически повторяющийся сигнал, используя информацию о частоте этого сигнала.
Принцип
действия синхронного детектора основан
на том, что его выходное напряжение в
каждый момент времени пропорционально
произведению мгновенных значений двух
входных напряжений, подводимых к
независимым входам. Произведение
двух величин положительно, если обе они
положительны или обе отрицательны.
Поэтому на выходе синхронного детектора
положительные напряжения преобладают
над отрицательными лишь при условии,
что в обоих входных напряжениях
присутствует синхронно изменяющаяся
составляющая одинаковой формы. Тогда,
сглаживая (т. е. осредняя путем накопления)
выходное напряжение " синхронного
детектора, можно извлечь информацию
о наличии такой составляющей в присутствии
сильных мешающих сигналов. Действительно,
пусть на оба входа действуют
синусоидальные напряжения,![]() и
,
и
,![]() .
Тогда при равенстве их частот
.
Тогда при равенстве их частот![]() произведение
произведение
![]() (24)
(24)
Если
же![]() ,
то
,
то
INCLUDEPICTURE
"../../../DOCUME~1/B935~1/LOCALS~1/Temp/FineReader10/media/image96.jpeg"
\* MERGEFORMAT
 (24а)
(24а)
В первом случае появляется постоянная составляющая, пропорциональная амплитудам обоих входных напряжений, а во втором случае она отсутствует. Что касается переменных составляющих (удвоенной частоты 2м в первом Случае и суммарной o)i + q)2 и разностной сої — ш2 во втором), то они легко отсеиваются при сглаживании фильтром с достаточно низкой граничной частотой (большим временем накопления).
Таким способом удается обнаруживать и измерять интенсивность очень слабых периодических сигналов, если их частота точно известна в присутствии сильных помех. Достигается это подачей на один вход синхронного детектора исследуемого сигнала, включающего в себя как обнаруживаемый сигнал, так и помехи, а на другой вход — образца обнаруживаемого колебания известной частоты. При этом допустима лишь небольшая ошибка в значении частоты — не более малой доли периода на протяжении всего времени накопления. Практически эффективная работа синхронного детектора достигается, когда в качестве «опорного» колебания удается подать сигнал от того же источника, который является первоисточником обнаруживаемого сигнала. Так как в поисковых СНС поисковый сигнал создается устройствами, входящими в состав самой системы, не возникает никаких препятствий для использования этого же сигнала в качестве опорного. Общий принцип включения синхронного детектора в поисковые СНС иллюстрируется рис. 47.

Рис. 47. Схема включения синхронного детектора в поисковые СНС.
На исследуемую систему действуют различные задающие и возмущающие воздействия х, формирующие ее выходной сигнал у. Поисковые воздействия Хп.м формируются путем наложения модуляции на исходный поисковый сигнал хп, создаваемый источником поискового воздействия ИПВ. Этой цели служит модулятор М, воспринимающий синусоидальный модулирующий сигнал хм от генератора Г. Таким образом, изменения выходной переменной системы у, вызванные теми или иными поисковыми воздействиями, в отличие от изменений, вызванных воздействиями X, оказываются меченными модуляцией с частотой сигнала хм. Подача на синхронный детектор СД сигнала хш в качестве опорного позволяет отделить информацию о свойствах системы при различных значениях поискового воздействия от информации, заключенной в изменениях у за счет всех прочих воздействий. Сопоставление поискового воздействия Ха с выделяемой синхронным детектором реакцией на него уп системы осуществляется анализирующим устройством, непрерывно оценивающим эффективность того или иного поискового воздействия.
Основанные на этом принципе СНС позволяют достигать не просто достаточно хорошего качества работы, но в заданном смысле — наилучшего, причем выбранный критерий качества достигает максимального или минимального, в зависимости от требований, значения. Такие СНС называются экстремальными.
Лекция 8