

Оптимальное управление
Под оптимальным управлением понимается применение такого управляющего воздействия xY(t), которое обеспечивает достижение наилучшего значения какого-либо заранее обусловленного показателя качества управления объектом. Чаще всего такими показателями бывают быстродействие (время, затрачиваемое на перевод объекта в заданное состояние, являющееся целью управления), минимум энергетических затрат (суммарной энергии, затрачиваемой управляющим устройством на перевод объекта в заданное состояние) или минимальная погрешность воспроизведения следящей системой заданного сигнала при наличии мешающих возмущений (помех).
Для иллюстрации идеи оптимального управления рассмотрим условия наибольшего быстродействия следящей системы (рис. 32).
Предположим, что движок реохорда Rі быстро переведен в новое положение, вследствие чего появилось некоторое напряжение С/£, свидетельствующее о рассогласовании истинного значения выхода 01Г с заданным в3. Усиленное усилителем У напряжение ошибки подается на обмотку электродвигателя РД и вызывает его вращение в направлении, соответствующем уменьшению ошибки. При не очень большом значении произведения коэффициентов передачи в прямой и обратной ветви |3/С переходной процесс в системе будет апериодическим — типа 1 на рис. 22. В связи с тем, что динамические свойства электродвигателя сложнее, чем у инерционного звена первого порядка, форма переходного процесса несколько отличается от кривой 1 на рис. 22. Чтобы лучше разобраться в этом вопросе, помимо управляющего воздействия на электродвигатель — напряжения £/д, поступающего на него с выхода усилителя У (рис. 32), и выходной переменной — угла поворота вала 0И, примем во внимание еще одну внутреннюю переменную, описывающую состояние двигателя,— скорость вращения его вала v.
На рис. 38 изображены графики изменения выхода 0И, сигнала ошибки Ue, пропорционального разности ®3— ©и, напряжения на обмотке двигателя £/д и скорости его вращения v после скачкообразного изменения задающего воздействия 03. В первый момент t\, когда появляется ошибка Uа вместе с ней и напряжение на обмотке двигателя С/д, скорость его вращения равна нулю, так как в силу инерции двигатель не сразу трогается с места и лишь со временем набирает скорость, соответствующую подведенному к нему напряжению. В период разгона (t\ —t2 на рис. 38) первоначальное рассогласование сначала уменьшается медленно, а затем все быстрее. Однако с уменьшением рассогласования начинают падать и напряжения Ui И [/д. В результате этого, набрав в некоторый момент t2 наибольшую скорость вращения, при которой ошибка 1/Е уменьшается наиболее быстро, двигатель снова начинает замедлять свое вращение и при подходе системы к балансу (@и = @з, Us =0) останавливается в момент U.
Рис.
38. Переходный процесс в замкнутой
следящей системе при малом значении
произведения р.К.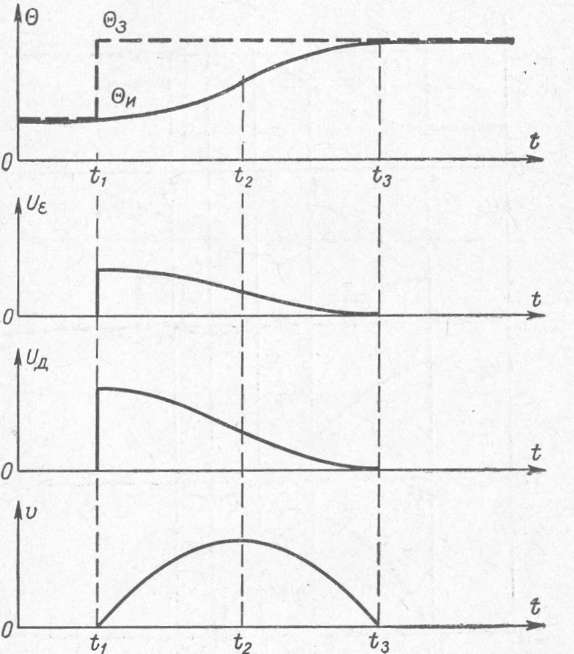
Если несколько увеличить произведение (3/С (например, подмять усиление усилителя сигнала ошибки и применить двигатель большей мощности), то можно получить переходной процесс с перерегулированием — с одним выбросом в сторону ошибки противоположного знака (типа 2 на рис. 22). Более точные графики изменения переменных ©и, Uд и v для рассматриваемой системы приведены на рис. 39.
Рис.
39. Переходный процесс в замкнутой
системе при повышенном значении
произведения р/С, сопровождающийся
одним выбросом.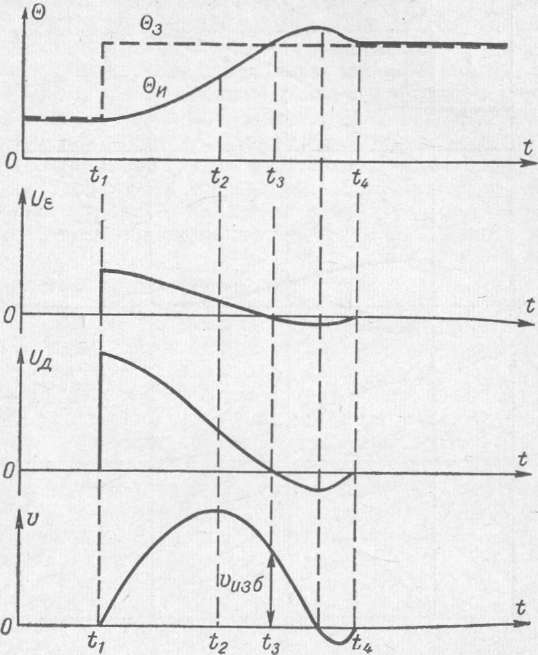
Из
них видно, что электродвигатель, обладая
избыточной скоростью подхода к заданному
положению![]() по
инерции проскакивает его в момент
t3
и
возвращается в это положение в момент
U
под
влиянием напряжения ошибки Ut,
сменившего
знак в момент
по
инерции проскакивает его в момент
t3
и
возвращается в это положение в момент
U
под
влиянием напряжения ошибки Ut,
сменившего
знак в момент
Дальнейшее увеличение произведения приведет к появлению колебательности (многократных проскоков заданного значения 0з, как у кривой 3 на рис. 22) и увеличению общей продолжительности переходного процесса.
Таким образом, в рассмотренной системе наибольшее быстродействие достигается при некотором оптимальном значении произведения р/С. Однако дополнительные возможности повышения быстродействия открываются, если отказаться от условия, что управляющее воздействие (в его роли выступает здесь напряжение Uд, подводимое к двигателю) прямо пропорционально сигналу ошибки иг. Выяснением оптимального вида управляющего устройства, формирующего это воздействие, занимается теория оптимального управления.
Оптимальное решение данной задачи подсказывается наблюдением за поведением водителя городского транспорта на коротких перегонах. Вагоновожатый, например, стремясь быстрее провести трамвай от одной остановки до другой, трогая с места, быстро подает на двигатели полное напряжение, до предела ускоряя их разгон, а приближаясь к очередной остановке с большой скоростью, вводит принудительное торможение.
Следуя этому приему, оптимальное по быстродействию управление в следящей системе надо построить так, как это показано на рис. 40.
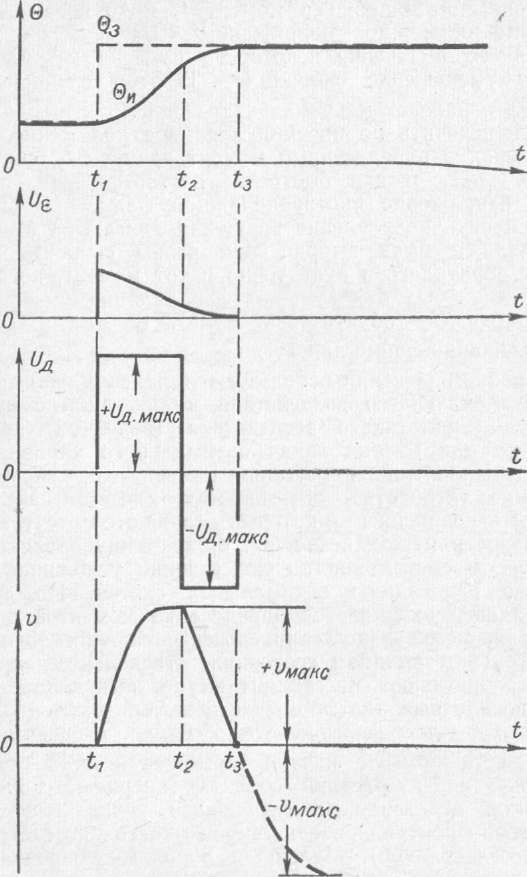
Рис. 40. Переходный процесс в следящей системе при оптимальном по быстродействию управлении.
При появлении ошибки в момент 11 надо сразу же подать максимально возможное напряжение + Уд. макс на двигатель и держать его в течение некоторого времени неизменным, невзирая на уменьшение ошибки Uе . В этом случае двигатель быстрее всего наберет максимальную скорость + уМакс- Для того чтобы не проскочить по инерции заданное положение, надо заблаговременно, в определенный момент времени t2, снять напряжение Н-ІУд. макс и для быстрейшего торможения подать на двигатель напряжение противоположной фазы,— {/д. маис, стремящееся сменить направление вращения двигателя. Момент времени t2 должен быть выбран так, чтобы скорость вращения двигателя обратилась в нуль точно в тот момент, когда выходная переменная 0И будет равняться заданному значению (когда ошибка Ut обратится в нуль). В этот же момент t3 надо снять напряжение с двигателя.
В полученном решении используются максимально возможные значения управляющего воздействия в сочетании с переключением направлений такого воздействия (релейное управление). Это типично для многих задач оптимального управления. Поскольку величина ошибки обычно изменяется непрерывно, то управляющие устройства оптимальных систем, как правило, должны быть нелинейными, которые отличаются отсутствием пропорциональности между величиной ошибки и управляющим воздействием. Это обстоятельство существенно усложняет расчет и техническую реализацию оптимальных систем. Но еще более трудной задачей оказывается определение моментов переключения управляющего воздействия, обеспечивающих точную остановку системы в заданном состоянии. Насколько непроста эта задача, хорошо знают пассажиры метро, выходящие на станциях без посадочных платформ, где вожатый должен остановить поезд так, чтобы двери вагонов точно совпали с дверями станции.
Для расчета момента начала торможения надо точно знать динамические характеристики объекта (инерцию, скорость торможения под действием максимального управляющего воздействия) и точно контролировать текущее состояние системы (скорость, рассогласование). Малейшая ошибка в определении момента переключения управляющего воздействия приводит к тому, что система либо не дойдет до заданного состояния, либо проскочит его. Для автоматического расчета моментов переключения в оптимальных системах в состав управляющего устройства зачастую приходится вводить быстродействующие ЦВМ.
Для теоретического определения оптимальных управлений привлекаются сложные математические аппараты (вариационное исчисление, динамическое программирование, принцип максимума Понтрягина), которые приводят к весьма громоздким выкладкам даже при решении относительно простых задач. Необходимый объем вычислений, которые должно осуществлять управляющее устройство, оказывается не всегда доступным даже для современных быстродействующих ЦВМ. Регулярные методы решения разработаны лишь для задач управления линейными динамическими системами с постоянными параметрами при заранее известных задающих и возмущающих воздействиях. В этот класс устройств не попадает, например, такое простое устройство, как усилитель с регулируемым коэффициентом усиления, используемый в системе АРУ. Ограничивает сферу эффективного приложения теории оптимального управления и узкий ассортимент показателей качества, на который ориентировано большинство законченных исследований в этой области. Эти критерии (быстродействие, экономичность, точность) сосредоточивают внимание на характеристиках самого процесса управления, а желаемое состояние объекта и его характеристики считаются заданными. Более общей задачей автоматических систем является автоматический выбор наилучшего, или во всяком случае достаточно хорошего, состояния и благоприятных характеристик объекта с учетом изменяющихся задающих и возмущающих воздействий. При этом надо задавать не требуемое состояние объекта, а некоторый показатель качества взаимодействия объекта со средой. В зависимости от этого показателя автоматическая система должна сама изменять задачу управления и характеристики объекта. Такого рода постановка задачи характерна для еще только зарождающейся области автоматики, посвященной разработке самоприспосабливающихся систем управления.
Лекция