

3.6.1. Подъемные механизмы
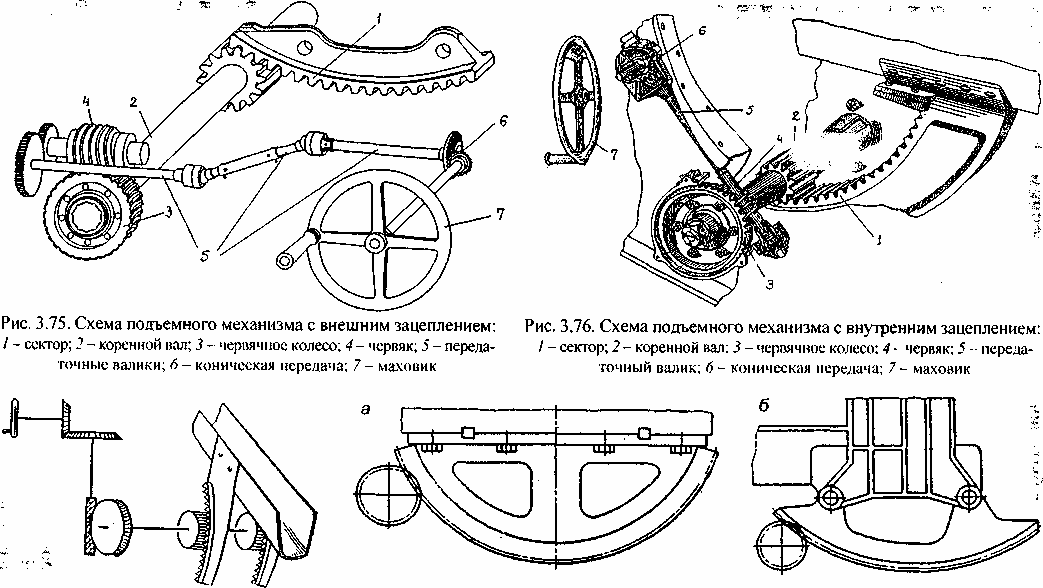
В современной артиллерии наибольшее применение находят подъемные механизмы, передающие вращательное движение от привода через систему зубчатых пар. Последняя пара в этой системе называется коренной и состоит из сектора подъемного механизма, закрепленного на люльке, и коренной шестерни. В соответствии с общей компоновкой лафета зацепление коренной шестерни
с сектором может быть внешним или внутренним. Примеры таких компоновок показаны на рис. 3.75 и рис. 3.76.
Сектор располагают на люльке, исходя из общей компоновки орудия, при этом стремятся уменьшить высоту линии огня. Для равномерного нагружения цапф и подцапфенников он чаще всего устанавливается в плоскости стрельбы, но по условиям компоновки орудия сектор иногда располагают сбоку. С целью уменьшения нагрузок на зубья сектора обычно увеличивают его ширину, применяются также двухсекторные подъемные механизмы (рис. 3.77), однако в этом случае повышаются требования к сборке всего механизма. Число зубьев на секторе выбирается в зависимости от диапазона углов возвышения, от радиуса сектора и модуля зацепления в коренной паре, следует иметь в виду, чем большее число зубьев имеют шестерни, тем лучше они работают. Но с увеличением числа зубьев увеличиваются габариты передачи, что нежелательно, особенно для коренной пары. Обычно минимальное число зубьев у коренной шестерни равно 12... 16.
К люльке сектор крепится с помощью болтов или проушин и пальцев (рис. 3.78).
Общую кинематическую схему подъемного механизма определяет передаточное число от исполнительного органа привода к качающейся части (для ручного привода, например, от допустимой угловой скорость вращения маховика до требуемой угловой скорости качающейся части). Количество кинематических пар выбирается из удобства размещения и обслуживания подъемного механизма в целом, при этом общее передаточное число равно:
i = i1 -i2 -i3 -...-in (3.37), где п - число кинематических пар в подъемном механизме.
Легкость и плавность наводки определяется в основном величиной усилия наводчика на маховике. Это усилие при установившемся движении можно определить по формуле:
![]() ,
(3.38)
,
(3.38)
где Мст - момент статических сопротивлений, включающий в себя сумму всех моментов трения и момента неуравновешенности качающейся части;
R - радиус маховика (по рукоятке);
![]() -
коэффициент полезного действия механизма.
При страгивании (в период разгона,
происходящего примерно за 1/6 …1/5 оборота
маховика)
-
коэффициент полезного действия механизма.
При страгивании (в период разгона,
происходящего примерно за 1/6 …1/5 оборота
маховика)
усилие на наводку возрастает примерно в два раза.
Наиболее эффективным
путем снижения усилий на рукоятке
маховика является повышение КПД
механизма наводки. Этого можно достичь
при уменьшении числа кинематических
пар, повышении КПД в червячных и винтовых
передачах, а также благодаря
использованию смазки и предохранению
механизма от пыли и грязи. Однако
требование о наличии самотормозящихся
пар в механизме приводит к реальному
КПД
![]() 0,4.
0,4.
Несбиваемость наводки обеспечивается введением в кинематическую цепь механизма наводки самотормозящихся пар: винтовой или червячной с углом наклона их винтов:
a<arctgf (3.39) где f- коэффициент трения между сопрягающимися поверхностями.
В тяжелых орудиях иногда применяют гидромеханические подъемные механизмы (рис. 3.79, а) с гидродвигателем поступательного действия, состоящего из цилиндра 1 и поршня 2. Как правило, шарнир цилиндра связан с гнездом в верхнем станке, а шарнир поршня — с гнездом люльки. При придании углов возвышения гидронасос подает жидкость в рабочую полость А, а из нерабочей полости Б жидкость идет на слив в бак. Под давлением жидкости поршень давит на люльку и изменяет положение качающейся части. После остановки на заданном угле возвышения качающаяся часть удерживается с помощью гидрозамков, запирающих жидкость в гидросистеме. При уменьшении углов возвышения назначение полостей А и Б меняется на обратные. Для большей компактности в продольном направлении поршень делают телескопическим (рис. 3.79, б), при Рис. 3.80. Винтовой подъемный механизм
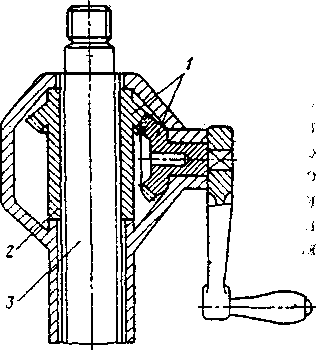
Рис. 3.81. Подъемно-уравновешивающий механизм:
1 - коническая пара; 2 - внутренняя труба; 3 - матка; 4 - винт; 5 - наружная труба; б – корпус, 7 - пружина
этом поперечные габариты всего узла несколько возрастают. Ступени телескопического поршня могут выдвигаться одновременно или последовательно.
В легких орудиях находили применение винтовые подъемные механизмы (рис. 3.80), они применяются также в некоторых современных минометах.
Вращение рукоятки подъемного механизма через коническую пару 1 передается матке 2, которая может быть выполнена как одно целое с ведомой конической шестерней. Если винт 3 шарнирно закреплен на верхнем станке, то вращение матки заставит перемещаться вверх (вниз) корпус, связанный с качающейся частью. Тем самым будут придаваться необходимые углы возвышения. Возможен также случай шарнирного крепления корпуса к верхнему станку. В этом случае углы возвышения будут придаваться качающейся части за счет поступательного движения винта, шарнирно скрепленного с люлькой.
Для облегчения работы наводчика винтовой подъемный механизм может быть конструктивно объединен с пружинным уравновешивающим механизмом (рис. 3.81). Вращение рукоятки через коническую пару 1 передается внутренней трубе 2 с маткой 3. Поскольку винт 4 закреплен неподвижно в наружной трубе 5, шарнирно связанной с верхним станком, вращение матки заставит поступательно перемещаться винт вместе с корпусом 6, соединенным с люлькой, придавая тем самым необходимые углы возвышения качающейся части. Перемещение внутренней трубы будет изменять усилие пружины 7, компенсирующее влияние силы тяжести качающейся части.