

8. Вынужденные колебания точки при наличии сопротивления среды
Рассмотрим
движение точки под действием
восстанавливающей силы
 ,
возмущающей силы
,
возмущающей силы
 ,
изменяющейся по гармоническому закону,
т.е.
,
и силы сопротивления среды
,
изменяющейся по гармоническому закону,
т.е.
,
и силы сопротивления среды
 ,
пропорциональной скорости, причем
,
пропорциональной скорости, причем
 ,
где
–
постоянный коэффициент.
,
где
–
постоянный коэффициент.
Дифференциальное уравнение движения точки под действием сил , , вдоль оси Х имеет вид
 или
или
 ,
(3.9.1)
,
(3.9.1)
где
 ,
,
 ,
.
,
.
Уравнение (3.9.1) является дифференциальным уравнением вынужденных колебаний точки при наличии сопротивления движению.
Общее
решение уравнения (3.9.1) состоит из двух
решений: общего решения
 и частного решения
,
т.е.
и частного решения
,
т.е.
 .
.
Решение
зависит от соотношения
 ,
, ,
, было
получено ранее для затухающих колебаний.
было
получено ранее для затухающих колебаний.
Частное
решение
,
определяющее вынужденные колебания,
будем искать в виде
 ,
,
где
 –
амплитуда вынужденных колебаний с
учетом сопротивления движению;
–
амплитуда вынужденных колебаний с
учетом сопротивления движению;
 –
величина сдвига фазы вынужденных
колебаний по отношению к фазе возмущающей
силы, определяемая по формуле
–
величина сдвига фазы вынужденных
колебаний по отношению к фазе возмущающей
силы, определяемая по формуле
 .
.
В частном случае, при , общее решение дифференциального уравнения (3.9.1) можно представить в виде

Отметим свойства вынужденных колебаний:
1. Движение материальной точки совершающей колебательное движение состоит из двух слагаемых, свободных или затухающих колебаний и чисто вынужденных.
2. Амплитуда вынужденных колебаний не зависит от начальных условий движения и в основном определяется соотношением p и k. Если эти величины близки между собой, то даже малая возмущающая сила может вызвать колебания с весьма большой амплитудой.
3. Вынужденные колебания не затухают.
4. Частота вынужденных колебаний равна частоте возмущающей силы.
9. Дифференциальные уравнения относительного движения точки. Переносная и кориолисова сила инерции
О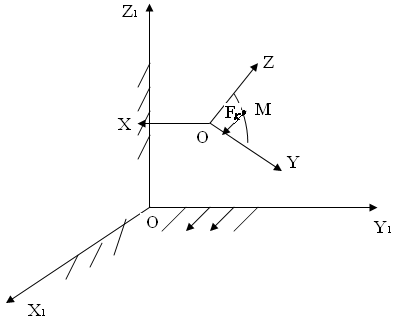 тносительным
движением материальной точки называется
движение точки в подвижной системе
координат.
тносительным
движением материальной точки называется
движение точки в подвижной системе
координат.
 –
неподвижная
система координат;
–
неподвижная
система координат;
 –
подвижная система координат.
–
подвижная система координат.
Если
на точку действует равнодействующая
всех активных сил, то в инерциальной
системе координат имеем
 ,
(3.10.1)
,
(3.10.1)
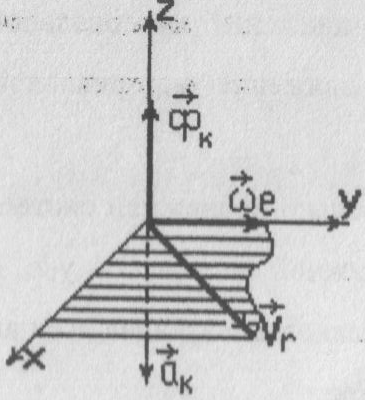
где
 – абсолютное ускорение точки, равное
геометрической сумме переносного
– абсолютное ускорение точки, равное
геометрической сумме переносного
 ,
относительного
,
относительного
 и кориолисового
и кориолисового
 ускорений,
т.е.
ускорений,
т.е.
 .
.
Тогда равенство (3.10.1) примет вид
 ,
или
,
или
 ,
(3.10.2)
,
(3.10.2)
где
 ,
, –
соответственно переносная и кориолисова
силы инерции.
–
соответственно переносная и кориолисова
силы инерции.
Уравнение (3.10.2) представляет собой основное уравнение динамики относительного движения материальной точки.
Это уравнение показывает, что в случае непоступательного переносного движения относительное движение материальной точки можно рассматривать как абсолютное, если к действующим на точку силам присоединить переносную кориолисову силы инерции.
Кориолисова сила определяется векторным выражением
 .
.
Проектируя векторное уравнение (3.10.2) на подвижные оси Х, Y, Z, получим дифференциальные уравнения относительного движения материальной точки в декартовых осях:

 ;
;
 ;
;
 ,
,

10. Некоторые основные понятия динамики системы материальных точек (система материальных точек, связи, силы)
Системой материальных точек или механической системой называется совокупность материальных точек, движения которых взаимосвязаны.
Силы, действующие на механическую систему, можно разделить на внешние и внутренние.
Внешними называются силы, действующие на точки системы, вызванные действием тел, не входящих в систему.
Внутренними называются силы взаимодействия между точками данной механической системы.
Внешние силы обозначаются верхним индексом «е», а внутренние – верхним индексом «i».
 –
внешняя
сила,
–
внешняя
сила,
 –
внутренняя сила.
–
внутренняя сила.
Свойства внутренних сил:
1. Главный вектор внутренних сил механической системы равен нулю:
 .
.
2.
Главный момент всех внутренних сил
системы относительно любого центра
равен нулю:
 .
.
Тела, ограничивающие движение системы материальных точек называются связями. Бывают динамические и кинематические связи.
Динамическими (стационарные и нестационарные, односторонние и двухсторонние, геометрические) называются связи, накладывающие ограничения на координаты точек системы.
Кинематическими называются связи, накладывающие ограничения как на координаты точек, так и на их скорости.
Математические свойства связей описываются уравнениями связей.
Уравнение геометрических связей имеет вид:
 .
.
Уравнение кинематической связи имеет вид:
 .
.
Стационарные – это связи, уравнения которых не включают время t.
Нестационарные – это связи, уравнения которых включают t.
Если материальному объекту связь мешает перемещаться в одном направлении, то связь называется односторонней.
Если материальному объекту связь мешает перемещаться в двух направлениях, то связь называется двухсторонней.