

40) Кинетический момент механической системы.
Кинетический
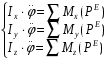
момент относительно полюса- главный
момент количества движения механической
системы относительно полюса - вектор,
равный геометрической сумме момента
количества движения всех точек системы
относительно того же полюса:![]()
Кинетический
момент относительно оси- скаляр,
равный алгебраической сумме моментов
количеств движения всех точек системы
относительно той же оси:![]()
Кинетический
момент вращающегося твердого тела
относительно оси вращения равен
произведению угловой скорости на момент
инерции тела относительно оси вращения:
![]() ;
;![]() .
.
![]()
Теорема: векторная производная по времени от кинетического момента механической системы относительно полюса геометрически равна главному моменту все внешних сил, действующих на механическую систему.
Следствия:
1. внутренние силы не влияют на изменение кинетического момента;
2. если главный момент все внешних сил относительно полюса равен нулю, то кинетический момент относительно этого полюса постоянный;
3. если главный момент все внешних сил относительно оси равен нулю, то кинетический момент относительно этой оси постоянный;
41)Дифуравнение вращательного движения твердого тела.
![]() .
Аналогично для двух других осей:
.
Аналогично для двух других осей:
Задачи:
1. по закону движения и моменту инерции определить главный вектор момент всех внешних сил, действующих на точки данного тела.
2. по внешним силам, моментам инерции и начальным условиям найти закон движения тела.
3. по внешним силам и угловому ускорению определить момент инерции.
Дифф-ные
ур-ния вращения твердого тела вокруг
неподвижной оси:
 ,
,
Jz
– момент инерции тела относительно оси
вращения z,
 –
момент внешних сил относительно оси
вращения (вращающий момент).
–
момент внешних сил относительно оси
вращения (вращающий момент).
 ,
– угловое ускорение, чем больше момент
инерции при данном
,
– угловое ускорение, чем больше момент
инерции при данном
 ,
тем меньше ускорение, т.е момент инерции
при вращательном движении является
аналогом массы при поступательном. Зная
,
тем меньше ускорение, т.е момент инерции
при вращательном движении является
аналогом массы при поступательном. Зная
 ,
можно найти закон вращения тела =f(t),
и, наоборот, зная =f(t),
можно найти момент. Частные случаи: 1)
если
,
можно найти закон вращения тела =f(t),
и, наоборот, зная =f(t),
можно найти момент. Частные случаи: 1)
если
 =
0, то
= const
– тело вращается равномерно; 2)
=
0, то
= const
– тело вращается равномерно; 2)
 =
const,
то
= const
– вращение равнопеременное. Уравнение
аналогичное дифф-ному уравнению
прямолинейного движения точки
=
const,
то
= const
– вращение равнопеременное. Уравнение
аналогичное дифф-ному уравнению
прямолинейного движения точки
 .
.
42)Сила Инерции. Динамические реакции.
|
|
Сила и момент сил инерции
|
|
Определение сил и моментов сил инерции Силы инерции и моменты сил инерции возникают при изменении скорости движения звеньев. Силы инерции препятствуют движению при ускорении и способствуют ему при замедлении. Формулы для определения: силы инерции звена Fui=-mi⋅asi; момента сил инерции Mui=-Isi⋅εi
где mi – масса звена; Isi – центральный момент инерции; asi – ускорение центра масс звена. Знак «-» показывает, что вектор Fui направлен против вектора ускорения asi (определяют из плана ускорений), а Mui – против углового ускорения i - го звена. |