

3.6 Якість і точність сак
Стійкість САК є необхідним, але не достатньою умовою для її ефективного функціонування. Важливе значення має якість керування, тобто ступінь задоволення сукупності вимог до форми кривої перехідного процесу, що визначає придатність системи для конкретних умов роботи.
Для порівняння якості різних САК досліджується їхня реакція на типові впливи. Звичайно це східчаста (толчковая) функція, як один з найбільш несприятливих видів збурень. Для систем, що працюють із періодичними збуреннями, доцільно оцінювати якість керування при гармонійному впливі. Всі інші збурювання можна розкласти на східчасті впливи з використанням інтеграла Дюамеля, або в ряд Фур'є.
Всі сучасні методи аналізу якості керування можна розділити на прямі методи аналізу по кривій перехідного процесу або по частотних характеристиках, і непрямі методи, що дозволяють, не вирішуючи диференціального рівняння, визначити деякі показники якості процесу керування; до них, зокрема, ставляться кореневі, інтегральні й частотні методи.
Характеристика перехідного процесу
Нехай
САР (рис. 3.34) при
t = 0 впливає
фактор, що обурює,
f у вигляді одиничної східчастої функції.
При нульових початкових умовах динамічний
режим описується перехідною характеристикою
h(t)
=
![]() y(t)
= y(t) - y0
= -e(t)
рис. . По ній можна визначити усе найбільш
важливі показники якості керування.
y(t)
= y(t) - y0
= -e(t)
рис. . По ній можна визначити усе найбільш
важливі показники якості керування.
1. Статична помилка eуст = y0 - yуст = -hуст - це різниця між запропонованим і дійсним значенням керованої величини в сталому режимі. Для статичних систем статична помилка відмінна від нуля рис. 3.34 і пропорційна величині фактора, що обурює, f (у лінійних САК) і коефіцієнту передачі системи по даному збурюванню, а для астатических - дорівнює нулю рис.3.35.
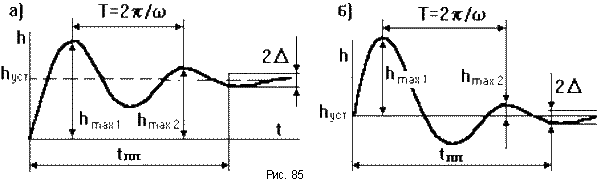
Рис. 3.34 – Статична система
2.
Час
перехідного процесу
tпп
- це час від моменту впливу, починаючи
з якого коливання керованої величини
не перевищують якогось
наперед заданого значення, тобто
|h(t)-hуст|
![]()
![]() .
Звичайно приймають
.
Звичайно приймають
![]() =
0.05hуст.
=
0.05hуст.

Рис.3.35 – Астатична система
-
Перерегулювання s - це максимальне відхилення керованої величини від сталого значення, виражене у відносних одиницях:
s
=
 .
.
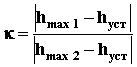
Тут hmax1 - значення першого максимуму перехідної характеристики. При більших перерегулюваннях можуть виникнути значні динамічні зусилля в механічній частині системи, електричні перенапруги й т.ін. Припустиме значення s визначається з досвіду експлуатації. звичайно воно становить 0.1...0.3, іноді допускається до 0.7.
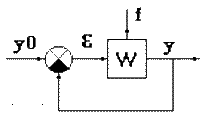
Рис. 3.36
4.
Частота
коливань
![]() =
2
=
2![]() /T,
де
T
- період коливань.
/T,
де
T
- період коливань.
5. Число коливань n за час tпп.
6.
Декремент
загасання
k,
дорівнює відношенню двох суміжних
перерегулювань:
 .
.
При створенні САК припустимі значення показників якості обмовляються технічними умовами, що можна представити у вигляді діаграми показників якості. Це область, за межі якої не повинна виходити перехідна характеристика (рис. 3.37).

Рис.3.37
Інтегральні критерії якості
Інтегральні
критерії дозволяють судити про якість
керування шляхом обчислення інтегралів
від деяких функцій керованої величини.
Ця функція вибирається таким шляхом,
щоб значення певного інтеграла від
цієї функції за часом від 0
до +
![]() було однозначно пов'язане з якістю
перехідного процесу. У той же час даний
інтеграл повинен порівняно просто
обчислюватися через коефіцієнти рівнянь
досліджуваної системи.
було однозначно пов'язане з якістю
перехідного процесу. У той же час даний
інтеграл повинен порівняно просто
обчислюватися через коефіцієнти рівнянь
досліджуваної системи.
Наприклад, якщо перехідна характеристика є монотонної, то можна затверджувати, що якість перехідного процесу тим краще, чим менше площа, обмежена даної кривої й сталим значенням керованої величини рис. 3.38. Вона дорівнює площі, обмеженої кривої зміни вільної складової керованої величини й віссю абсцис.
Якщо
система стійка, то вільна складова
керованої величини в межі прагне до
нуля![]() , тому площа обмежена даній кривій має
кінцеве значення й визначається по
формулі:
, тому площа обмежена даній кривій має
кінцеве значення й визначається по
формулі:
Joo
=
![]() .
.
Величина Joo являє собою лінійну оцінку якості керування. Чим вона менше, тим вище швидкодія системи. При виборі параметрів системи прагнуть забезпечити мінімум Joo. Якщо є який то варируємий параметр A, те можна побудувати криву Joo = f(A) рис. 3.38. Її мінімум, обумовлений з умови dJoo/d = 0, дасть оптимальне значення A.
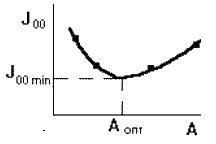
Рис. 3.38
Нехай дане рівняння динаміки замкнутої САК:
(a0pn + a1pn-1 + a2pn-2 + ... + an)y = (b0pm + b1pm-1 + ... + bm)u.
Вільний процес описується однорідним диференціальним рівнянням:
(a0pn + a1pn-1 + ... + an)yсв = 0,
отже:
yсв
=

yсв
=

Joo
=
![]() св(t)dt
=
св(t)dt
=
 .
.
Нехай при t = 0 САК мала наступні початкові умови:
yсв(0)
= y0,
![]() =
y0’,
...,
=
y0’,
..., = y0(n-1).
= y0(n-1).
Крім того
yсв(![]() ) = 0,
) = 0,![]() (
(![]() ) = 0,...,
) = 0,..., (
(![]() ) = 0,
) = 0,
тому
що процес загасає й при t
![]()
![]() вільна
складова й всі похідні стають дорівнюють
нулю. Підставляючи ці значення, одержуємо:
вільна
складова й всі похідні стають дорівнюють
нулю. Підставляючи ці значення, одержуємо:
Joo = (a0y0(n-1) + a1y0(n-1) + ... + an-1y0)/(an.
Тобто лінійну оцінку якості регулювання можна легко обчислити, знаючи початкові умови й коефіцієнти диференціального рівняння. Можливі й інші лінійні оцінки якості, але вони використаються рідше, наприклад:
J01
=
![]() св(t)
св(t)![]() t
t![]() dt; J0n
=
dt; J0n
=
![]() св(t)
св(t)![]() tndt.
tndt.

Рис. 3.39
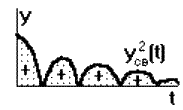
Рис. 3.40
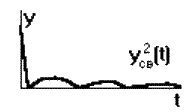
Рис.3.41
Лінійні оцінки якості незастосовні при коливальному процесі. Тому що площі, обмежені кривій yсв(t) і віссю абсцис складаються з урахуванням знака, те мінімальному значенню Joo може відповідати процес із більшим числом коливань і малою швидкодією (рис. ). У цьому випадку більше ефективні квадратичні оцінки якості, наприклад,
J20
=
![]() yсв2(t)dt.
yсв2(t)dt.
Значення цього інтеграла відповідає площі під кривій yсв2(t) і віссю абсцис, що завжди позитивна (рис. ).
Вибираючи параметри САК по мінімуму J20 ми наближаємо криву yсв(t) до осей координат, що приводить до зменшення часу регулювання (рис. ). Висновок формули для обчислення цієї оцінки складний, тому обмежимося зауваженням, що значення обчислюється через коефіцієнти диференціального рівняння a0...an,b0...bm. При обчисленні доданків у цій формулі використаються визначники Гурвица, так що навіть розрахунок по ній сполучений з певними труднощами й вимагає використання ЕОМ або спеціальних таблиць.
При виборі параметрів САК по мінімуму J20 часто одержують небажану колебательность процесу, тому що наближення yсв(t) до осі ординат викликає різке збільшення початкової швидкості, що у свою чергу може викликати велике перерегулювання, зменшивши при цьому запас стійкості. Для того, щоб забезпечити плавність протікання процесу, у квадратичну оцінку якості додається доданок, що залежить від швидкості зміни регульованого параметра yсв’(t). Одержуємо критерій якості
J21
=
![]() св2(t)
+ t2
св2(t)
+ t2![]() (yсв’(t))2]dt,
(yсв’(t))2]dt,
де
![]() -
якась наперед задана постійна часу, що
визначає вагове співвідношення між
оцінкою по yсв
і по yсв’.
При малих значеннях
-
якась наперед задана постійна часу, що
визначає вагове співвідношення між
оцінкою по yсв
і по yсв’.
При малих значеннях
![]() зменшення
коливання буде незначним. Завищення
зменшення
коливання буде незначним. Завищення
![]() збільшить
час перехідного процесу так, що її вибір
визначається конкретними умовами.
збільшить
час перехідного процесу так, що її вибір
визначається конкретними умовами.

Рис.3.42
Цей
інтеграл має найменше значення, якщо
перехідний процес відповідає експоненті
з постійної часу![]() (рис. ). Інакше кажучи, по міркуваннях
якості керування варто прагнути до
того, щоб перехідна характеристика
замкнутої САК якнайменше відрізнялася
від характеристики інерційної ланки
першого порядку, що має наперед задану
постійну часу
(рис. ). Інакше кажучи, по міркуваннях
якості керування варто прагнути до
того, щоб перехідна характеристика
замкнутої САК якнайменше відрізнялася
від характеристики інерційної ланки
першого порядку, що має наперед задану
постійну часу
![]() ,
значення якої визначаються технічними
умовами.
,
значення якої визначаються технічними
умовами.