

2.1.2 Види зворотного зв’язку
Об'єкт керування – це технічний пристрій або технологічний процес, деякі фізичні величини якого підтримуються незмінними або підлягають цілеспрямованим змінам.
Найбільше поширення в техніціу одержав принцип зворотного зв'язку (рис. 2.4). Тут керуючий вплив коректується залежно від вихідний величини y(t). І вже не важливо, які збурювання діють на ОУ. Якщо значення y(t) відхиляється від необхідного, то відбувається коректування сигналу u(t) з метою зменшення даного відхилення. Зв'язок виходу ОУ з його входом називається головним зворотним зв'язком (ОС).
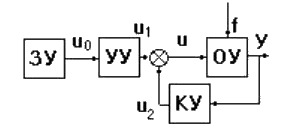
Рис. 2.4 – Принцип зворотного зв,язку
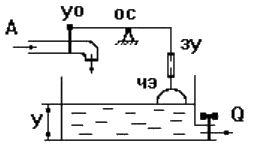
Рис. 2.5 – Приклад зворотного зв,язку
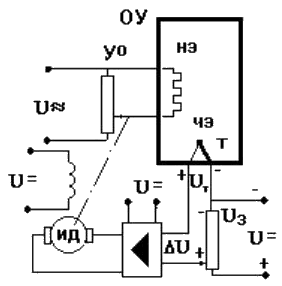
Рис.2.6 – Формування ЗУ необхідного значення вихідної величини yо(t)
В
окремому випадку рис. 2.6 ЗУ формує
необхідне значення вихідної величини
yо(t),
що рівняється з дійсним значенням на
виході САК y(t).
Відхилення e
= yо-y
з виходу пристрою, що порівнює, подається
на вхід
регулятора Р, що поєднує в собі УУ, УО,
ЧЕ. Якщо e![]() 0,
то регулятор формує керуючий вплив
u(t),
що діє доти, поки не забезпечиться
рівність
e
= 0,
або y
= yо.
Тому що на регулятор подається різниця
сигналів, такий зворотний зв'язок
називається негативним,
на відміну від позитивного
зворотного зв'язку,
коли сигнали складаються.
0,
то регулятор формує керуючий вплив
u(t),
що діє доти, поки не забезпечиться
рівність
e
= 0,
або y
= yо.
Тому що на регулятор подається різниця
сигналів, такий зворотний зв'язок
називається негативним,
на відміну від позитивного
зворотного зв'язку,
коли сигнали складаються.
Таке
керування у функції відхилення називається
регулюванням,
а подібну САУ називають системою
автоматичного регулювання
(САР). Так на рис. 2.7 зображена спрощена
схема САР хлібопекарської печі. Роль
ЗУ тут виконує потенціометр, напруга
на якому Uз
рівняється з напругою на термопарі Uт.
Їхня різниця
![]() U
через підсилювач подається на виконавчий
двигун, що регулює через редуктор
положення движка реостата в ланцюзі.
Наявність підсилювача говорить про те,
що дана САР є
системою
непрямого регулювання,
тому що енергія для функцій керування
береться від сторонніх джерел живлення,
на відміну від систем
прямого регулювання,
у яких енергія береться безпосередньо
від ОУ, як, наприклад, у САР рівня води
в баці
рис. 2.5.
U
через підсилювач подається на виконавчий
двигун, що регулює через редуктор
положення движка реостата в ланцюзі.
Наявність підсилювача говорить про те,
що дана САР є
системою
непрямого регулювання,
тому що енергія для функцій керування
береться від сторонніх джерел живлення,
на відміну від систем
прямого регулювання,
у яких енергія береться безпосередньо
від ОУ, як, наприклад, у САР рівня води
в баці
рис. 2.5.
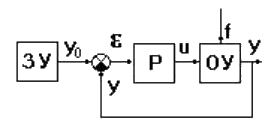
Рис .2.7 – Спрощена схема САР хлібопекарської печі
Характерною рисою схеми є наявність вимірювально-перетворювального пристрою, що забезпечує роботу автоматичного регулятора зі стандартними значеннями струму або напруги. Вимірювально-перетворювальний пристрій виконує наступні функції: перетворить нестандартний вхідний сигнал у стандартний вихідний; здійснює фільтрацію вхідного сигналу; здійснює лінеаризацію статичної характеристики датчика з метою одержання лінійного діапазону.
Для розрахункових цілей вихідну схему спрощують до схеми, що включає в себе тільки АР - регулятор, ЕС- елемент порівняння й ОР - об'єкт регулювання. Тут під об'єктом регулювання вже розуміється незмінна частина системи, що складається з вимірювально-перетворювального пристрою, виконавчого механізму, регулювального органа й властиво об'єкта керування.
2.1.3 Способи корекції сак
2.1.3.1 Застосування принципу зворотного зв'язку
Найбільше поширення в техніку одержав принцип зворотного зв'язку рис. 2.3. Тут керуючий вплив коректується залежно від вихідної величини y(t). І вже не важливо, які збурювання діють на ОУ. Якщо значення y(t) відхиляється від необхідного, то відбувається коректування сигналу u(t) з метою зменшення даного відхилення. Зв'язок виходу ОУ з його входом називається головним зворотним зв'язком (ОЗ).
В
окремому випадку ЗУ формує необхідне
значення вихідної величини yо(t),
що рівняється з дійсним значенням на
виході САК y(t).
Відхилення
e
= yо-y
з виходу пристрою, що порівнює, подається
на вхід
регулятора Р, що поєднує в собі УУ, УО,
ЧЕ. Якщо e![]() 0,
то регулятор формує керуючий вплив
u(t),
що діє доти, поки не забезпечиться
рівність e
= 0,
або y
= yо.
Тому що на регулятор подається різниця
сигналів, те такий зворотний зв'язок
називається негативної,
на відміну від позитивного
зворотного зв'язку,
коли сигнали складаються.
0,
то регулятор формує керуючий вплив
u(t),
що діє доти, поки не забезпечиться
рівність e
= 0,
або y
= yо.
Тому що на регулятор подається різниця
сигналів, те такий зворотний зв'язок
називається негативної,
на відміну від позитивного
зворотного зв'язку,
коли сигнали складаються.
Таке
керування у функції відхилення називається
регулюванням,
а подібну САК називають системою
автоматичного регулювання
(САР). Так на рис. 2.5 зображена спрощена
схема САР хлібопекарської печі. Роль
ЗУ тут виконує потенціометр, напругу
на якому Uз
рівняється з напругою на термопарі Uт.
Їхня різниця
![]() U
через підсилювач подається на виконавчий
двигун ВД, що регулює через редуктор
положення движка реостата в ланцюзі
НЕ. Наявність підсилювача говорить про
те, що дана САР є системою
непрямого регулювання,
тому що енергія для функцій керування
береться від сторонніх джерел харчування,
на відміну від систем
прямого регулювання,
у яких енергія береться безпосередньо
від ОУ, як, наприклад, у САР рівня води
в баці рис. 2.3.
U
через підсилювач подається на виконавчий
двигун ВД, що регулює через редуктор
положення движка реостата в ланцюзі
НЕ. Наявність підсилювача говорить про
те, що дана САР є системою
непрямого регулювання,
тому що енергія для функцій керування
береться від сторонніх джерел харчування,
на відміну від систем
прямого регулювання,
у яких енергія береться безпосередньо
від ОУ, як, наприклад, у САР рівня води
в баці рис. 2.3.
Недоліком принципу зворотного зв'язку є інерційність системи. Тому часто застосовують комбінацію даного принципу із принципом компенсації, що дозволяє об'єднати достоїнства обох принципів: швидкість реакції на збурювання принципу компенсації й точність регулювання незалежно від природи збурень принципу зворотного зв'язку.