

2.2.1 Стандартна форма запису рівнянь стану
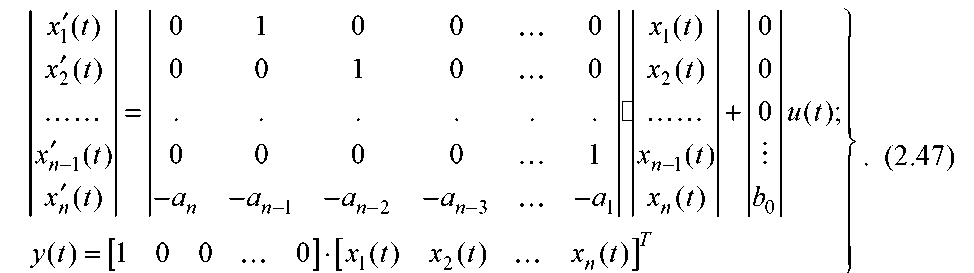
Нехай відомо нормоване (a0 = 1) диференціальне рівняння вхід - вихід, що встановлює зв'язок між виходом y(t) і входом u(t) дновимірної системи n-го порядку:
![]()
Визначимо рівняння стану, що відповідають диференціальному рівнянню (2.43). Оскільки знання початкових значень вихідний змінної і її похідних
![]() )
)
![]()

можуть бути прийняті як змінні стану
Розв’язавши рівняння (2.43) щодо старшої похідної, маємо
![]()

Тоді з (2.44) і (2.45) одержуємо наступну систему диференціальних рівнянь першого порядку щодо змінних стану x1(t), x2(t),K, xn(t) і алгебраїчне рівняння, що зв'язує вихід системи y(t) з відповідною змінною стану
Систему рівнянь (2.46) зручно записати у векторно-матричній формі в такий спосіб:

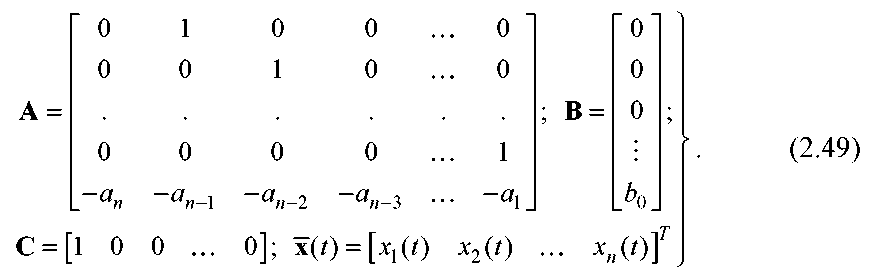
де згідно з (2.47) матриця стану A розмірності n´ n , матриця входу B розмірності n ´1 , матриця виходу C розмірності 1´ n і вектор стану x(t) розмірності n´1 дорівнюють:
Рівняння (2.46) називаються рівняннями стану в стандартній формі.
Приклад 2.5. Рівняння САК по каналу вхід-вихід має вигляд
![]()
Перетворити це рівняння в рівняння стану і вирішити їх.
Вирішення.
Перетворимо (2.50) до нормованого вигляду
![]()
Позначимо: x1(t) = y(t); x2(t) = y(t); x3(t) = y(t) і перетворимо вихідне рівняння до системи вигляд у (2.46)
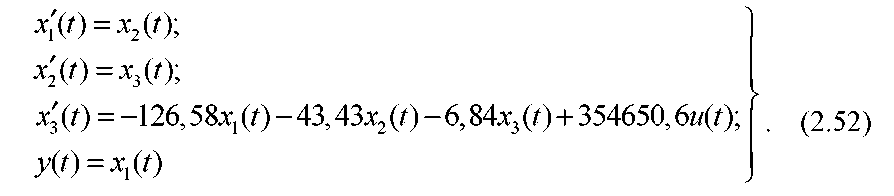
Тоді рівняння стану САУ набуде вигляду:

де
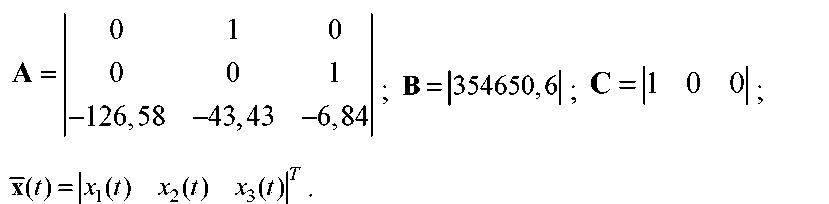
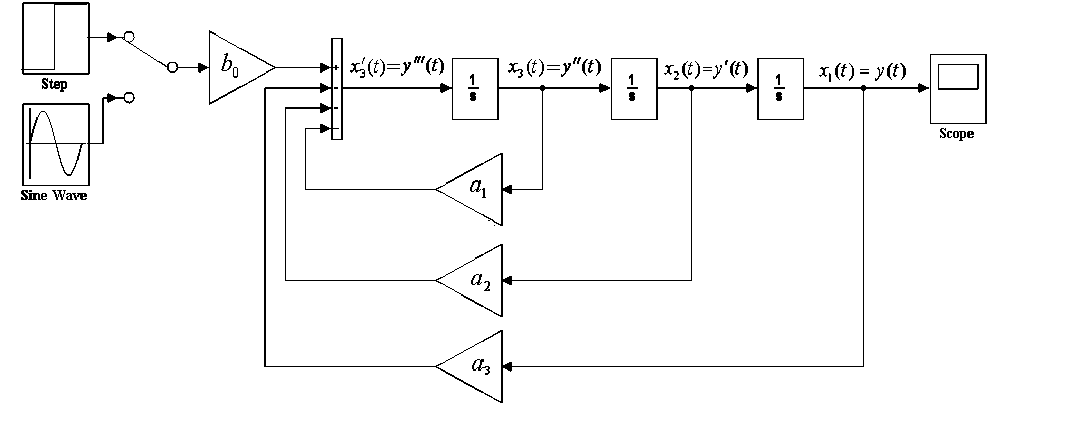
Рис. 2.14 – Блок-схема вирішення диференціального рівняння третього порядку за допомогою програми Simulink
Тут: три блоки Integrator здійснюють інтегрування відповідних вхід-них змінних із заданням від внутрішнього джерела internal їхніх початкових значень; чотири блоки Gain служать для задання зазначених на рис. коефіцієнтів рівняння; ручний перемикач Manual Switch здійснює вибір типу вхідного сигналу.
Відповідні графіки змінних стану при u(t) = 1(t) подані на рис. 2.15.
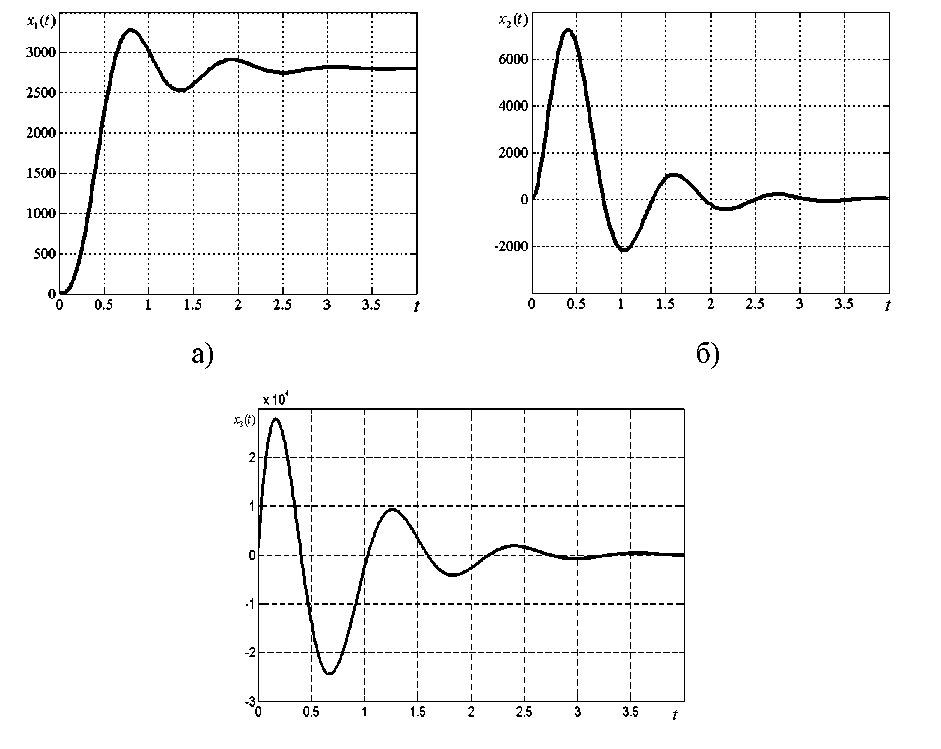
в)
Рис. 2.15 – Графіки змінних стану:
![]()
2.3 Структурні схеми сак
У ТАК при аналізі САК саме широке застосування одержали так звані структурні схеми. При цьому під структурною схемою САУ мається на увазі умовне графічне зображення математичної моделі системи у вигляді сукупності окремих ланок із вказівкою зв'язків між ними.
Ця схема, по суті, являє собою графічне зображення системи рівнянь, що описують поводження елементів і пристроїв САК.
Структурна схема може також розглядатися як схема проходження і перетворення сигналів у САК. Тому її іноді ще називають алгоритмічною схемою.
2.3.1 Позначення у структурних схемах
Розглянемо правила зображення елементів САК на структурних схемах.
Ланка позначається у вигляді прямокутника із вказівкою вхідних і вихідних величин.

Рис. 2.16 – Зображення ланок
Усередині прямокутника вказують передаточну функцію рис. 2.16,а. Допускається замість W(s) вказувати рівняння або характеристику ланки рис. 2.16, б. Позначення вхідних і вихідних величин записують у вигляді зображень або оригіналів залежно від позначення у прямокутнику. Допускається також ланки нумерувати, а їхні передаточні функції, рівняння або характеристики представляти поза схемою.
Ланцюг передачі сигналу зображується прямою лінією, на якій стрілкою вказують напрямок проходження сигналу, а також наводять літерне позначення цього сигналу.
Елемент порівняння зображують у вигляді, наведеному на рис. 2.17
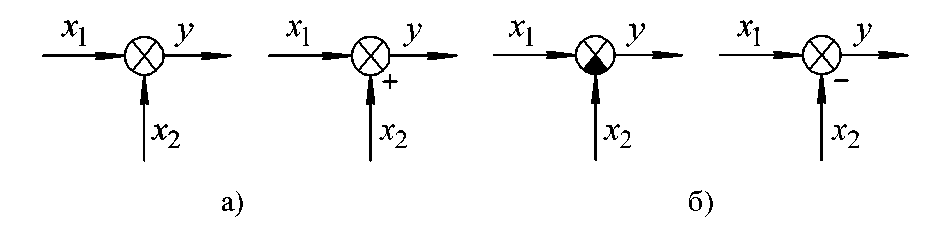
а) y= x1 +x2 ; б) y=x1 -x2