

2 Параметри й режими сак
2.1 Властивості сак
2.1.1 Принципи керування
Залежно від способів формування керуючого впливу розрізняють наступні принципи керування: по збурюванню; по відхиленню керованої величини від необхідного значення; комбінованогоі.
Система керування по збурюванню є розімкнутою рис. 2.1а.
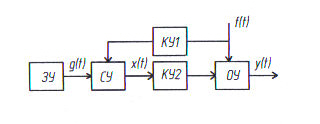
Рис. 2.1а – Система керування по збурюванню розімкнута
Принцип керування по відхиленню застосовується в замкнутих САК рис 2.1б.

Рис. 2.1б – Принцип керування по відхиленню в замкнутих САК
У техніку широко застосовують САК з принципом комбінованого керування, що сполучає принцип керування по відхиленню (коригувальний пристрій КУ2) і по збурюванню (коригувальний пристрій КУ1). рис.2.2. Завдяки такій структурі системи мають наступні властивості:
- за допомогою компенсаційних зв'язків (КУ1) можливе досягнення повної компенсації помилок (інваріантності), викликуваних основними що обурюють і задають впливами;
- поряд з можливістю компенсації помилок від основних впливів знижуються помилки від другорядних впливів за допомогою зворотного зв'язку (КУ2);
- при порушенні умов компенсації помилка зменшується замкнутою системою;
- завдяки наявності розімкнутих компенсаційних каналів у комбінованій системі не так гостро стоїть проблема стійкості, як у замкнутих САК.
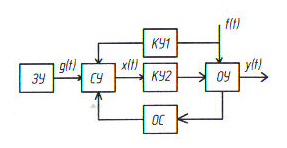
Рис. 2.2 – Функціональна схема комбінованої САК
В цілому теорія автоматичного регулювання є найбільш старим і краще інших розвиненим розділом загальної теорії керування. Сучасний етап розвитку кібернетики як науки про керування характеризується бурхливим розвитку загальної теорії керування, що поєднує в собі всі аспекти керування. Найбільш важливими її сучасними напрямками є теорія оптимальних й адаптивних систем керування та теорія складних систем. Крім того, адаптивні системи розділяються ще на екстремальні та самонастроювальні.
Теорія оптимальних систем займається питаннями побудови автоматичних систем, що забезпечують оптимальні, тобто найкращі в певному змісті результати. Іноді кібернетику визначають як науку про оптимальне (тобто найкращое) керування.
У будь-якій автоматичній системі керуючий пристрій вирішує в загальному випадку два завдання:
1) на підставі прихожої інформації "з'ясовує" властивості й стан керованого об'єкта;
2) на основі цих даних визначає, які дії необхідні для керування. У найпростіших системах рішення одного із цих завдань може бути відсутнім або мати примітивну форму.
Відомості про об'єкт можуть бути отримані в готовому виді як інформація від людини, або введенням у систему спостерігачів (ідентифікаторів), або пристроїв автоматичного пошуку у випадку екстремальних систем. В останньому випадку системи називаються системами дуального керування. Ця назва пов'язане з тим, що керуючий вплив повинне мати дуальний (двоїстий) характер. З одного боку, він повинен бути в відомій мірі вивчаючим, а з іншого боку, також і напрямним, що доводить об'єкт до необхідного стану.
Автоматична зміна способу функціонування керуючого пристрою, називана адаптацією або настроюванням системи (що самопристосовуються) вимагає додаткових пристроїв, називаних пристроями або контурами адаптації. У загальному вигляді схема адаптивної системи наведена на рис. 2.3. На підставі оцінки зовнішніх умов роботи й властивостей об'єкта керуючий пристрій адаптації УУа змінює структуру й параметри основного керуючого пристрою УУ0, забезпечуючи необхідне значення критерію якості J(g,y,u,f). Пристрій адаптації визначає залежно від алгоритму роботи відхилення критерію J від заданого або екстремального значення.

Рис. 2.3 – Функціональна схема адаптивної системи
Таким чином, в адаптивних системах УУ вирішує завдання:
а) одержання інформації про впливи й динамічні властивості об'єкта керування в процесі його роботи (одержання робочої або поточної інформації) - завдання ідентифікації, або впізнавання;
б) формування з отриманої інформації значення критерію якості системи J (поточного критерію адаптації);
в) порівняння поточного значення критерію якості з еталонним або екстремальним значенням й обчислення відповідного керуючого впливу;
г) зміни параметрів або структури основного керуючого пристрою УУ0 для приведення критерію якості до необхідного значення. Критеріями якості залежно від призначення системи можуть бути точність керування (наприклад, мінімум СКО), швидкодія, який-небудь показник ефективності керування (наприклад, коефіцієнт корисної дії, витрата енергії на керування й ін.).
Адаптивні системи, в яких адаптація здійснюється зміною значень параметрів керуючого пристрою, називаються самонастроювальними; зміною значень параметрів і структури керуючого пристрою – системами що самоорганізуються. У самоорганізуюючих пристроях САК адаптація здійснюється шляхом вибору структури, т.ч. вибору коригувальної ланки або їхньої комбінації з набору певного числа ланок змінюваної частини основного керуючого пристрою, а потім відбувається самонастроювання параметрів обраної структури. Такі системи забезпечують необхідну якість керування при більше широких діапазонах зміни властивостей об'єкта й зовнішніх умов, чим самонастроювальні, але вони більше складні.
САК доцільно класифікувати виходячи з найбільш загальних ознак й їхніх властивостей. На рис. 1.3 наведена одна з можливих класифікацій.