

1.1.4. Центр параллельных сил и центр тяжести
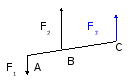
1. Теорема о сложении двух параллельных сил, направленных в одну сторону
|
|
Равнодействующая двух параллельных сил, направленных в одну сторону, равна арифметической сумме этих сил, параллельна им и направлена в ту же сторону, а линия действия равнодействующей делит прямую АВ на части обратно пропорциональные этим силам. |

-
Теорема о сложении двух параллельных сил, направленных в противоположные стороны
|
|
Равнодействующая двух параллельных сил, направленных в одну сторону, равна разности этих сил, параллельна им и направлена в сторону большей по модулю силы, а линия действия равнодействующей делит продолжение прямой АВ со стороны большей силы на части обратно пропорциональные этим силам. |
Точка С –центр параллельных сил –это точка, через которую проходит линия действия равнодействующей системы параллельных сил.
3. Центр параллельных сил. Центр тяжести тела
Любое тело можно представить как совокупность точек С –центров параллельных сил, каждая из которых обладает силой тяжести. Эти силы направлены по радиусу к центру Земли. Поскольку размеры тел, с которыми приходится иметь дело в механике, ничтожно малы по сравнению с радиусом Земли, то считают, что все эти силы тяжести параллельны между собой и направлены в одну сторону.
Равнодействующая этих сил тяжести называется весом тела.
Точка С –центр параллельных сил зависит от точек приложения сил F1 и F2 и от величины этих сил.
Центром тяжести тела называют точку, через которую проходит вес тела.
4. Координаты центра параллельных сил
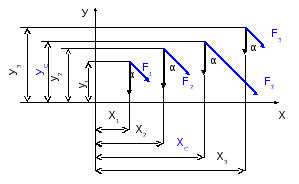
Теорема Вариньона:
Момент равнодействующей плоской системы сил относительно произвольно взятой точки равен алгебраической сумме моментов составляющих сил относительно той же точки.
![]()
![]()
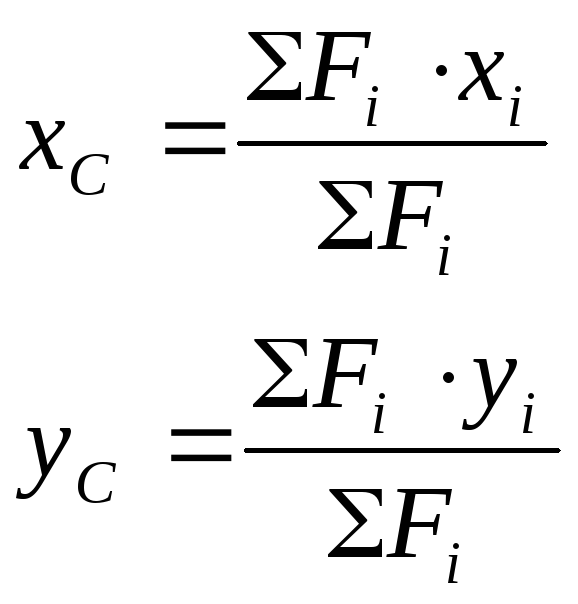
Формулы для определения координат центра параллельных сил:
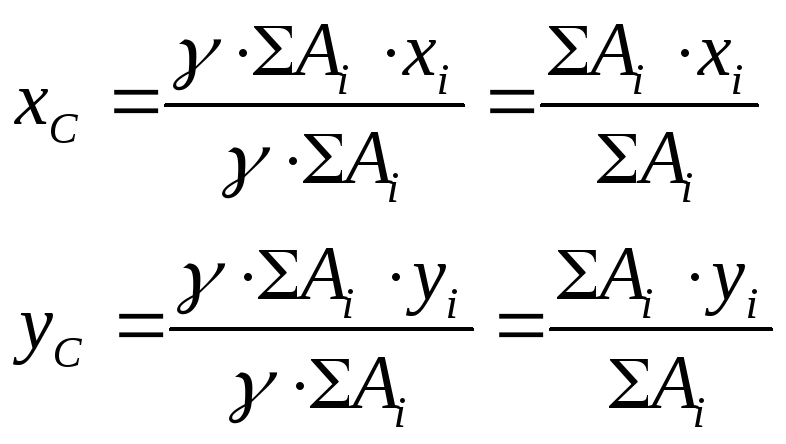
5. Координаты центра тяжести площадей
В инженерных расчётах часто требуется определить центр тяжести плоской фигуры весом Р. Эта сила равномерно распределена по всей площади пластинки, так что G=А∙γ, где γ –сила тяжести, приходящаяся на единицу площади (вес 1м2 площади).
Сила тяжести каждого участка:
Gi=Ai∙γi
Ai –площадь i-того участка.
Формулы координат центра тяжести площадей
6. Центры тяжести простых фигур
|
Прямоугольник С –точка пересечения диагоналей
|
Треугольник С –точка пересечения медиан
|
|
Дуга окружности
|
Круговой сектор
При
α=π/2 (полукруг)
|




7. Алгоритм решения задач по методу разбиения
-
Разбиваем сечение на простейшие фигуры.
-
Показываем на чертеже центры тяжести каждой фигуры.
-
Выбираем оси отсчёта, если они не указаны.
-
Указываем на чертеже координаты центра тяжести каждой простейшей фигуры относительно осей отсчёта.
-
Находим площади и координаты центров тяжестей всех простейших фигур в отдельности.
-
Определяем координаты центра тяжести всей составной фигуры и показываем на чертеже точку С и её координаты.