

Основные типы связей
1. Свободное опирание тела о связь
На рисунках тело изображено в виде бруса; связь заштрихована.

RA – направлена перпендикулярно плоской поверхности;
RB – направлена перпендикулярно поверхности;
RC – направлена перпендикулярно криволинейной поверхности связи;
RD – направлена перпендикулярно общей касательной обеих поверхностей;
RE – направлена перпендикулярно общей касательной обеих поверхностей;
RF – направлена перпендикулярно поверхности тела.
Во всех случаях связь препятствует движению тела в направлении, перпендикулярном опорной поверхности.
2. Гибкая связь – это нити или цепи, которые считают условно нерастяжимыми. Реакции нитей или цепей всегда направлены вдоль связей от тела к связи.

3. Стержневая связь – осуществляется при помощи жёсткого невесомого стержня произвольного очертания с шарнирными креплениями на концах. Реакция стержневой связи направлена по прямой, соединяющей концевые шарниры.
Шарнир – подвижное соединение тел, дающее им возможность свободно поворачиваться относительно друг друга (например, два тела соединяются между собой при помощи болта, пропущенного в отверстие этих тел).

4. Шарнирно-подвижная опора
Тело
(брус) опирается на опорную поверхность
не непосредственно, а через шарнир,
поставленный на катки. Эта опора позволяет
поворот вокруг оси шарнира и даёт
небольшое перемещение.
П ри
этом известны точка приложения реакции
– центр шарнира и направление реакции
– перпендикулярно опорной плоскости.
Неизвестна лишь величина реакции.
ри
этом известны точка приложения реакции
– центр шарнира и направление реакции
– перпендикулярно опорной плоскости.
Неизвестна лишь величина реакции.
5. Шарнирно-неподвижная опора
 Позволяет поворот
вокруг оси шарнира и не дает никаких
линейных перемещений (подшипники,
дверные петли, оконные завесы). Известна
точка приложения реакции – центр
шарнира. Неизвестны: направление и
величина реакции.
Позволяет поворот
вокруг оси шарнира и не дает никаких
линейных перемещений (подшипники,
дверные петли, оконные завесы). Известна
точка приложения реакции – центр
шарнира. Неизвестны: направление и
величина реакции.
6. Жёсткая заделка (защемление) ограничивает любые перемещения тела (гвоздь, забитый в стену).
Н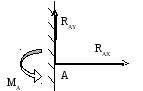 еизвестно:
величина, направление и точка приложения.
Появляется целая система сил реакций,
которую обычно представляют в виде
одной силы (сила реакции жёсткой заделки)
и одной пары сил с моментом (реактивный
момент). При решении задач их раскладывают
на составляющие силы и моменты.
еизвестно:
величина, направление и точка приложения.
Появляется целая система сил реакций,
которую обычно представляют в виде
одной силы (сила реакции жёсткой заделки)
и одной пары сил с моментом (реактивный
момент). При решении задач их раскладывают
на составляющие силы и моменты.
1.1.2. Системы сил
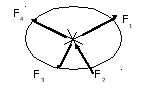
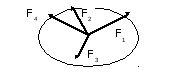
1.1.2.1. Системы сходящихся сил
-
Плоская система сходящихся сил.
Система, линии действия которых лежат в одной плоскости и все пересекаются в одной точке, называется плоской системой сходящихся сил.
|
|
На основании следствия из аксиомы 3 переносим эти силы вдоль линии их действия в точку О.
|
Две силы, приложенные к одной точке тела, образуют простейшую плоскую систему сходящихся сил. Равнодействующую этих сил определяют по правилу параллелограмма.
Задачу сложения двух сходящихся сил решают:
-
Графическим методом.
-
Аналитическим методом.