-
Скорость точки
Если точка, за равные промежутки времени, проходит равные отрезки пути, то её движение называется равномерным, если неравные – неравномерным.
V=S/t – равномерное движение
[км/ч; м/с] 1 км/ч = 0,278 м/с
1м/с =3,6 км/ч
Скорость неравномерного движения – величина переменная V=f(t)
Р ассмотрим
точку, движение которой задано уравнением
S=f(t).
За промежуток времени ∆t
т. М переместиться в положение М1
по дуге ММ1,
пройдя путь ∆S.
ассмотрим
точку, движение которой задано уравнением
S=f(t).
За промежуток времени ∆t
т. М переместиться в положение М1
по дуге ММ1,
пройдя путь ∆S.
Средняя скорость движения точки
![]()
(Если промежуток времени ∆t мал, то дугу можно заменить хордой) средняя скорость направлена по хорде от т. М к М1.
Скорость в данный момент времени найдём путём перехода к пределу ∆t→0.
![]()
Мгновенная скорость при любом движении точки равна первой производной координаты по времени.
Скорость в каждый момент времени направлена по касательной к траектории в сторону движения
Пример: S = 0,1t²+t
V = dS/dt = 0,2t+1
При координатном способе движения точки, определяют проекции скорости на координатные оси.
Проекция скорости на координатную ось равна первой производной от соответствующей координаты по времени.

![]()
![]()
![]()
![]()
cos(V^,x) = Vx/V
cos(V^,y) = Vy/V
-
Ускорение точки
Это изменение скорости в единицу времени.
При прямолинейном движении точки вектор скорости совпадает с траекторией, следовательно, и вектор изменения скорости совпадает с траекторией.
Среднее ускорение aср = ∆V/∆t
Истинное ускорение в прямолинейном движении равно первой производной скорости или второй производной координаты по времени, (м/с²).
![]()
При движении точки по криволинейной траектории скорость меняет свое направление.
Ускорение точки равно векторной производной скорости по времени.
![]()
а) Естественный способ
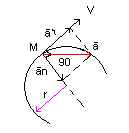 Для удобства
полное ускорение раскладывают на две
взаимно перпендикулярные составляющие
по касательной и нормали к траектории
движения
Для удобства
полное ускорение раскладывают на две
взаимно перпендикулярные составляющие
по касательной и нормали к траектории
движения
![]()
aτ – касательное (тангенциальное) ускорение совпадает по направлению со скоростью или противоположно ей; характеризует изменение модуля скорости
![]()
ān – нормальное (центростремительное) ускорение перпендикулярно к направлению скорости точки; определяет изменение направления вектора скорости.
![]()
где r – радиус кривизны траектории
Нормальное ускорение направлено по нормали к центру кривизны траектории.
Полное ускорение точки
![]()
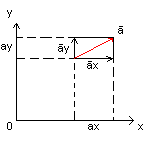
б) Координатный способ
Проекция ускорения на координатную ось равна второй производной от соответствующей координаты по времени
![]()
![]()
![]()
Виды движения точки в зависимости от ускорения
|
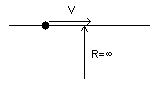
1. Равномерное V=const ; а τ= dV/dt = 0 |
|
|
Прямолинейное
an=0 |
Криволинейное
an = V²/R ≠ 0 |
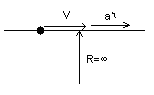
V = f(t) ≠ const ; а τ = dV/dt = 0 |
|
|
Прямолинейное
an=0
|
Криволинейное
an = V²/R ≠ 0
|
- это движение точки, при котором в равные, произвольно взятые промежутки времени модуль скорости изменяется на одну и ту же величину а τ = dV/dt = const Может быть: - равноускоренное (а τ >0) - равнозамедленное (а τ <0) - прямолинейное (an = 0) и криволинейное (an ≠ 0)
|
|