

Уравнения равновесия:

1.1.2.2. Системы произвольно расположенных сил
-
Плоская система произвольно расположенных сил
-
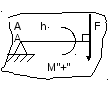
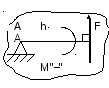
Моментом силы относительно точки называется взятое со знаком «+» или «-» произведение модуля силы на перпендикуляр, опущенный из точки на линию действия силы (плечо силы).
![]()
(Н∙м)
Точка, относительно которой берётся момент, называется центром момента.
|
|
Правило знаков для двух моментов Момент силы положителен, если сила стремится вращать плечо вокруг центра моментов по часовой стрелке и отрицателен, если против часовой стрелки |
|
|
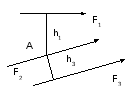
Пример: Определить моменты сил относительно точки А. М1=F∙h1; М2=0; М3=–F∙h3 Если линия действия силы проходит через точку, то момент силы относительно этой точки равен 0. |
|
-
Теорема Пуансо (приведение силы к точке, не лежащей на линии её действия)
|
|
Не изменяя действия данной силы на твёрдое тело, её можно перенести параллельно самой себе и приложить в любой другой точке тела, добавив при этом пару сил с моментом, равным моменту переносимой силы относительно новой точки её приложения. |

-
Приведение плоской системы произвольно расположенных сил к точке
|
|
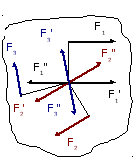
Используя теорему Пуансо, перенесём каждую силу системы в произвольно взятую точку О – центр приведения. При приведении плоской системы произвольно расположенных сил к точке система приводится: 1. К главному вектору, равному векторной сумме всех сил системы
2. К главному моменту равнодействующей пары сил или алгебраической сумме моментов составляющих пар сил
|
Частные случаи:
-
FГЛ≠0; МГЛ≠0. Система приводится к главному вектору и главному моменту.
-
FГЛ=0; МГЛ≠0. Система приводится к главному моменту, равному моменту равнодействующей пары сил.
-
FГЛ≠0; МГЛ=0. Система приводится к главному вектору, равному равнодействующей силе.
-
FГЛ=0; МГЛ=0. Система находится в равновесии.
4. Условие и уравнения равновесия плоской системы произвольно расположенных сил
![]()
Плоская система произвольно расположенных сил находится в равновесии, когда главный вектор и главный момент равны нулю.
Уравнения равновесия плоской системы произвольно расположенных сил могут быть представлены в трёх формах:
|
|
Должны быть равны 0 алгебраические суммы моментов всех сил относительно трёх любых, но не лежащих на одно прямой точек. |
Ось Х не должна быть перпендикулярна к прямой, проходящей через точки А и В. |

-
Классификация нагрузок
-
По способу приложения:
- сосредоточенные (приложенные в точке) – F;
- распределённые – q.
Нагрузка может быть распределена по длине, по площади, по объёму.

q – интенсивность распределённой нагрузки, т.е. сила, приходящаяся на единицу длины участка (единицу площади, единицу объёма); кН/м.
2. По характеру действия:
-статические, т.е. возрастающие от 0 до конкретного значения, а затем остающиеся постоянными;
-динамические (ударные) – прикладываются сразу с максимальной величиной;
-повторно-переменные – повторяются через определённый промежуток времени.
3. По времени действия:
-постоянные;
-временные.
-
Алгоритм решения задач
-
Определить вид связи.
-
Приложить реакции связей.
-
Выбрать и составить систему уравнений равновесия плоской системы произвольно расположенных сил.
-
Решить уравнения равновесия и найти искомые величины.
-
Произвести проверку.