

7.4. Задача № 4
Исходные данные: уравнения движения (х и у заданы в м)
х = 4t ; (1)
y = 16t2 – 1 (2)
Момент времени t1
=
![]() сек.
сек.
Движение точки М происходит в плоскости.
Уравнения (1) и (2) являются параметрическими уравнениями траектории точки М. Чтобы получить уравнение траектории в обычной координатной форме, исключим время t из уравнений движения:
Тогда из (1) t =
![]() .
Делая подстановку в (2), получаем
.
Делая подстановку в (2), получаем
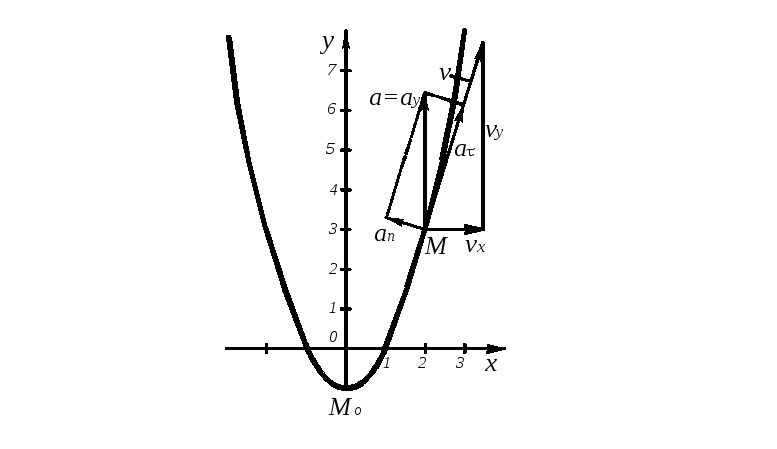
у = х2 – 1 (3)
Полученное выражение есть уравнение параболы.
Для определения скорости точки находим проекции скорости на оси координат:
![]() м/сек;
м/сек;
![]() м/сек.
м/сек.
Модуль скорости точки
v =![]() ; (4)
; (4)
v =
![]() =
16,5 м/сек.
=
16,5 м/сек.
Находим проекции ускорения точки на оси координат
аx
=
![]() =
0;
=
0;
аy
=
![]() =
32 м/сек2.
=
32 м/сек2.
В заданный момент времени t = t1 = ½ с они имеют значения аx = 0; аy = 32 м/сек2.
Модуль ускорения точки
а =
![]() .
.
а =
![]() =
32 м/сек2.
=
32 м/сек2.
Координаты точки, а также ее скорость, ускорение и их проекции на координатные оси для заданного момента времени t = t1 = ½ с для удобства заносим в таблицу 1.
Таблица 1
|
Координаты, м |
Скорость, м/сек |
Ускорение, м/сек2 |
Радиус кривизны, м |
|||||||
|
x |
y |
vx |
vy |
v |
аx |
аy |
а |
аτ |
аn |
ρ |
|
2 |
3 |
4 |
16 |
16,5 |
0 |
32 |
32 |
31 |
7,94 |
34,3 |
Касательное ускорение находим путем дифференци-рования модуля скорости (4):
аτ
=
![]() ;
;
![]()
В заданный момент времени t = t1 = ½ с
![]() =
31 м/сек2.
=
31 м/сек2.
Следовательно, модуль касательного ускорения
аτ = 31 м/сек2.
Знак «+» при
![]() показывает, что движение точки ускоренное
и, следовательно, направления
показывает, что движение точки ускоренное
и, следовательно, направления
![]() и
и
![]() совпадают.
совпадают.
Нормальное ускорение точки в данный момент времени
![]() =
7,94 м/сек2.
=
7,94 м/сек2.
Радиус кривизны траектории в той точке,
где при t = t1
= ½ с находится
точка М:
![]() =
34,3 м
=
34,3 м
Полученные значения аτ,аn и ρ также заносим в табл. 1.
Построение параболы производим на миллиметровке в удобном масштабе в соответствии с (1) и (2), задаваясь временем t (начиная с t = 0, включая t = t1 = ½ с). Данные расчетов заносим в табл. 2.
Таблица 2
Вычисление траектории точки м
|
Положение точки |
t, c |
Координаты точки |
|
|
x, м |
y, м |
||
|
М0 |
0 |
0 |
– 1 |
|
М1 |
0,25 |
1 |
0 |
|
М2 |
0,75 |
3 |
8 |
|
М3 |
1,0 |
4 |
15 |
|
Исследуемое положение |
|||
|
М |
t1 = 0,5 |
2 |
3 |
Показываем на траектории начальное
положение точки Мо (при t
= 0, х
= 0 м, у
= – 1
м), положение точки М
в заданный момент времени (при t
= ½
с, х
= 2 м, у
= 3
м). Вектор
![]() строим по составляющим
строим по составляющим
![]() и
и
![]() ,
причем этот вектор должен быть направлен
по касательной к траектории точки.
Вектор
,
причем этот вектор должен быть направлен
по касательной к траектории точки.
Вектор
![]() находим как по составляющим
находим как по составляющим
![]() и
и
![]() ,
так и по
,
так и по
![]() и
и
![]() ,
чем контролируем правильность решения.
,
чем контролируем правильность решения.
Приложение 1