

7. Методические указания к решению задач
7.1. Задача № 1
-
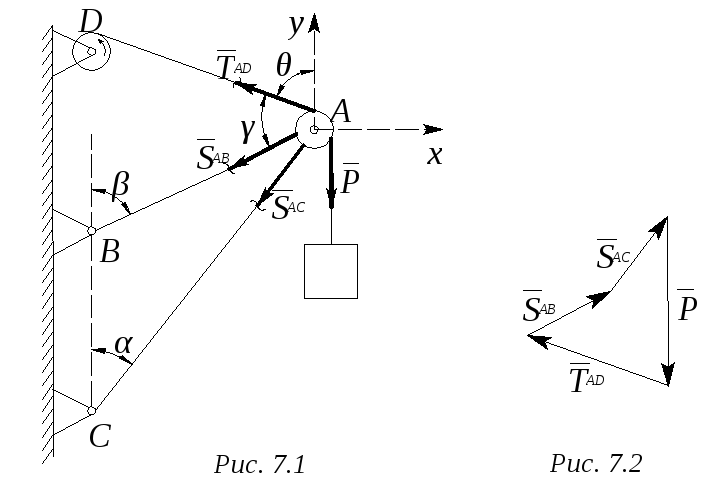
В соответствии со значениями углов α, β и γ выполняем схему конструкции подъемного механизма.
-
Определяем объект равновесия – узел А.
-
Освобождаемся от связей и заменяем их действие на объект равновесия реакциями. Реакции невесомых стержней с шарнирами на концах направлены вдоль стержней, реакция абсолютно гибкой нити – вдоль нити в сторону ее растяжения. Полагая стержни растянутыми, направляем усилия в них от узла А.
-
Расчетная схема подъемного механизма показана на рис. 7.1. Координатные оси направлены по горизонтали и по вертикали.
-
Система сил – сходящаяся на плоскости. Неизвестных – 2 (SAB и SAC). Задача статически определима.
-
Условия равновесия: ΣFkx = 0; ΣFky = 0.
-
Уравнения равновесия:
ΣFkx = – SAC ·sin α – SAB ·sin β – TAD ·sin θ = 0; (1)
ΣFky = TAD ·cos θ – SAB ·cos β – SAC ·cos α – P = 0; (2)
где θ = 180° – (β + γ).
В этих уравнениях TAD = Р, так как неподвижный блок А не изменяет величины усилия в нити, а изменяет только его направление (трением в блоке пренебрегаем).
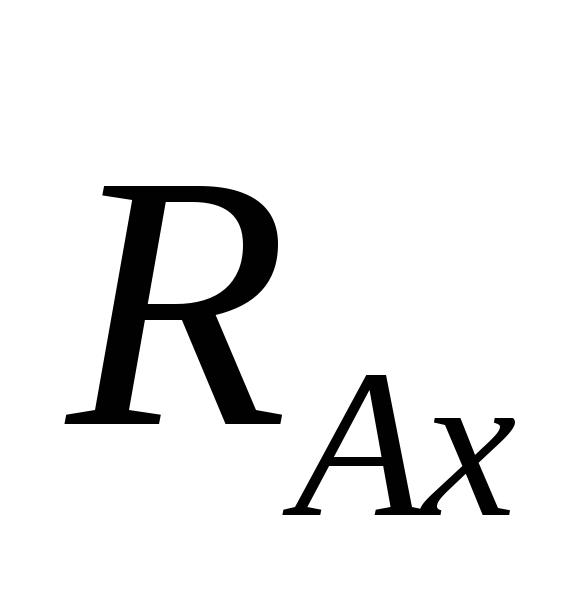
8. Решаем уравнения равновесия и определяем неизвестные усилия SAB и SAC.
9. Осуществляем проверку полученных результатов с помощью силового многоугольника (рис. 7.2).
7.2. Задача № 2
-
Схему балки изобразить на чертеже в масштабе с указанием всех заданных сил (осевая линия балки и силы должны выделяться на чертеже).
-
В качестве объекта равновесия рассматриваем балку, освобождая ее от связей. Жесткое защемление выполняет роль трех связей, так как препятствует двум линейным перемещениям и одному угловому. Действие защемления на балку компенсируем реакциями
 ,
,
 ,
Mзад.
,
Mзад. -
Расчетная схема балки показана на рис. 7.3. Координатные оси направляем по горизонтали и по вертикали.
-
Распределенную нагрузку интенсивности q, представляющую собой систему параллельных сил, заменяем равнодействующей
 ,
равной Q = q
· b. Силу
,
равной Q = q
· b. Силу
 ,
для удобства вычисления ее момента,
раскладываем на две составляющие,
параллельные осям х и у: P·sinβ
и P·cosβ.
Основание – теорема Вариньона.
,
для удобства вычисления ее момента,
раскладываем на две составляющие,
параллельные осям х и у: P·sinβ
и P·cosβ.
Основание – теорема Вариньона.
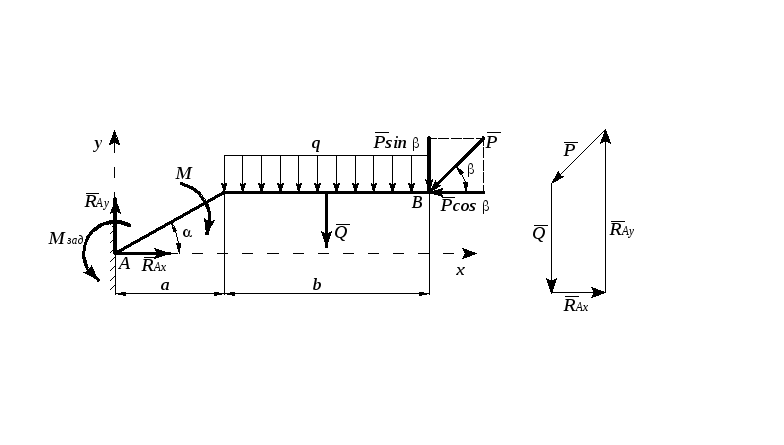
Рис. 7.3 Рис. 7.4
-
В результате получаем произвольную плоскую систему сил, действующих на рассматриваемую балку. Условия равновесия - ΣFkx = 0; ΣFky = 0; ΣМА = 0. Так как неизвестных в задаче тоже 3, то задача статически определима.
-
Уравнения равновесия:
ΣFkx = RAx – P·cos β = 0; (1)
ΣFky = RAy – Q – P·sin β = 0; (2)
ΣМА
= Mзад – M –
Q(a +
![]() )
– P·sin β(a + b) +
)
– P·sin β(a + b) +
+ P·cos β·a·tgα = 0 (3)
-
Решаем уравнения равновесия и определяем неизвестные RAx, RAy, Мзад.
-
Проверка
ΣМВ = Mзад
– M – RAy(a
+ b) + RAx·a·tgα
+ Q·![]() = 0
= 0
Графическая проверка решения задачи выполняется с помощью построения силового многоугольника (рис. 7.4).
Σ![]() =
=
![]() +
+
![]() +
+![]() +
+![]() = 0 (проверяем равенство нулю главного
вектора системы сил. Равенство нулю
главного момента системы сил следует
из третьего уравнения равновесия).
= 0 (проверяем равенство нулю главного
вектора системы сил. Равенство нулю
главного момента системы сил следует
из третьего уравнения равновесия).