

Задача № 3
Изобразить на чертеже в масштабе схему заданной фермы с указанием всех размеров и действующих на нее сил.
Расчет фермы состоит из двух частей:
а) определение опорных реакций;
б) определения усилий в стержнях фермы при известных реакциях опор.
А) Определение опорных реакций
-
При определении опорных реакций ферму рассматриваем как абсолютно твердое тело заданных размеров, на которое действуют активные силы и реакции связей. Реакции опор фермы определяются так же, как и для балки. Наклонные силы
 и
и
 раскладываем на составляющие, параллельные
осям х и у ( на рис. 6.5 показаны
P1sinβ;
P1cosβ;
P2sinα;
P2cosα).
раскладываем на составляющие, параллельные
осям х и у ( на рис. 6.5 показаны
P1sinβ;
P1cosβ;
P2sinα;
P2cosα). -
Расчетная схема показана на рис. 7.5.
Условия равновесия для полученной плоской системы сил:
ΣFkx = 0; ΣМА = 0; ΣМВ = 0.
-
Уравнения равновесия:
ΣFkx = P2·sin α + RBx – P1·sin β = 0; (1)
ΣMA = – P2·cosα·a – P2·sinα·3a·tgα – P3·2a + RBy·3a +
+ P1·cos β·4a + P1·sin β·6a·tgα = 0; (2)
ΣMB = – RA·3a + P2·cosα·2a – P2·sinα·3a·tgα +
+ P3·a + P1·sin β·6a·tgα + P1·cos β·a = 0; (3)
-
Решить уравнения равновесия и определить неизвестные реакции опор RA; RBx; RBy.
-
Проверка аналитическая:
ΣFkу = RА – P2·cosα – P3 + RBу + P1·cosβ = 0.
Графическая проверка – построение силового много-угольника (рис. 7.6) (аналогично предыдущей задаче проверяем равенство нулю главного вектора системы сил)
Σ![]() =
=
![]() +
+![]() +
+![]() +
+![]() +
+![]() +
+![]() =
0.
=
0.
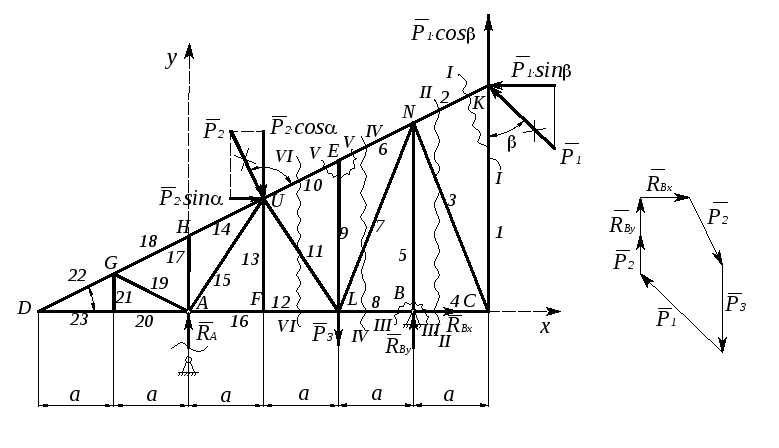
Рис. 7.5 Рис. 7.6
Б) Определение усилий в стержнях фермы
-
Предварительно пронумеруем все стержни фермы арабскими цифрами. Узлы обозначим заглавными буквами (рис. 7.5). Для определения усилий в стержнях указанной преподавателем правой или левой половины фермы пользуемся способом вырезания узлов, который заключается в том, что из фермы мысленно вырезается узел, в котором сходятся два стержня, и рассматривается его равновесие под действием активных сил и реакций разрезанных стержней, величина которых определяется из двух уравнений равновесия полученной плоской системы сходящихся сил. Переходя от узла к узлу, последовательно рассматриваем аналогично равновесия каждого узла. При этом в каждом узле должно быть только два неизвестных усилия в стержнях.
-
Для определения усилий в стержнях 1 и 2 мысленно вырезаем (по линии 1-1) узел «К» компенсируем усилиями
 и
и
 ,
которые направляем от узла вдоль
стержней (рис. 7.7,а), предпо-лагая, что
они растянуты. Рассматриваем равновесие
узла «К».
,
которые направляем от узла вдоль
стержней (рис. 7.7,а), предпо-лагая, что
они растянуты. Рассматриваем равновесие
узла «К».
Объект равновесия – узел «К». Действующие
силы и реакции связей
![]() ,
,
![]() ,
,
![]() .
.
Система сил – сходящаяся на плоскости. Неизвестных – 2 (S1, S2).
Условия равновесия:
ΣFkx = – P1·sin β – S2·cos α = 0; (1)
ΣFky = P1·cos β – S2·sin α – S1 = 0; (2)
Решая уравнения (1) и (2), определяем неизвестные усилия S1 и S2. Получение отрицательного значения реакции будет свидетельствовать, что данный стержень сжат.
Выполняем графическую проверку
правильности полученных результатов
построением силового треугольника
(рис.
7.7, б). Σ![]() =
=
![]() +
+![]() +
+![]() =
0.
=
0.
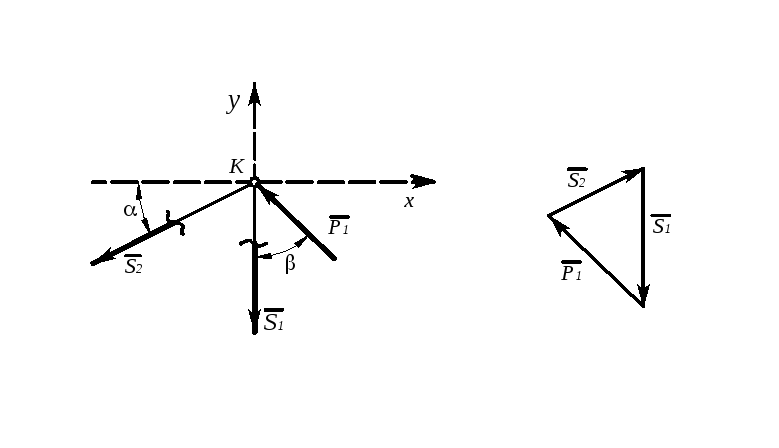
Рис. 7.7, а Рис. 7.7, б
-
Переходим к узлу С, т.к. он содержит только два стержня с неизвестными усилиями: S3 и S4. на расчетной схеме узла (рис. 7.8, а) усилие
 направлено противоположно
направлено противоположно
 ,
а по величине равно ему.
,
а по величине равно ему.
Уравнения равновесия для узла С:
ΣFkx = S4 + S3·cos γ = 0; (3)
ΣFky
=
![]() + S3·sin
γ = 0; (4)
+ S3·sin
γ = 0; (4)
Угол γ находим из треугольника BNC:
tg γ =
![]() =
=![]() =
5tgα.
=
5tgα.
Решая уравнения (3) и (4), определяем неизвестные S3 и S4.
Графическая проверка равновесия узла С показана на рис. 7.8, б.

Рис. 7.8, а Рис. 7.8, б
-
Для определения усилий в стержнях 5 и 8 целесообразно вырезать узел «В» по линии III–III и рассмотреть его равновесие (рис. 7.5). Расчетная схема узла «В» показана на рис. 7.9, а.
Уравнения равновесия для узла В:
ΣFkx
= –S8
+
RBx
+
![]() =
0; (5)
=
0; (5)
ΣFky = S5 + RBу = 0; (6)
Решая уравнения (5) и (6), определяем неизвестные усилия S5, S8.
Графическая проверка равновесия узла «В» показана на рис. 7.9, б.
Σ![]() =
=
![]() +
+![]() +
+![]() +
+
![]() +
+
![]() =
0.
=
0.
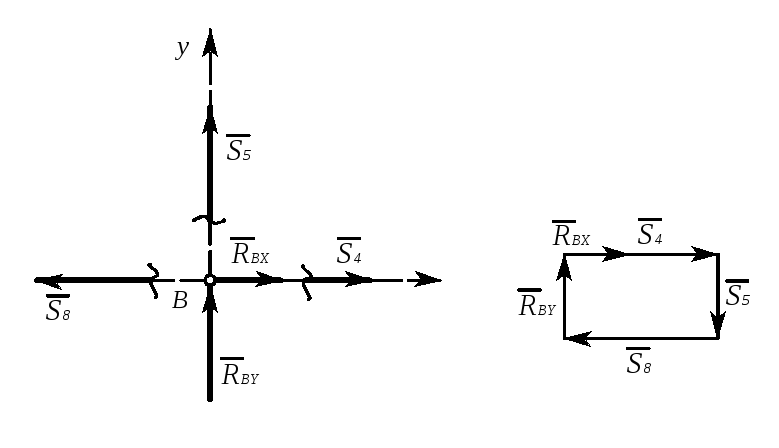
Рис. 7.9, а Рис. 7.9, б
Затем последовательно рассматриваем равновесие узлов N, E, L и т.д.
5. Для проверки правильности определения усилий в стержнях фермы воспользуемся другим способом – методом сечений (методом Риттера). Разрезаем мысленно ферму, к которой приложены все внешние силы (в том числе опорные реакции), на две части так, чтобы число разрезанных стержней не превышало 3-х, и заменяем действие отброшенной части искомыми усилиями стержней. Для отрезанной части фермы составляем 3 уравнения равновесия в виде уравнений моментов относительно точек, где пересекаются линии действия двух неизвестных усилий (точек Риттера). При этом в каждое уравнение будет входить только одно неизвестное усилие, что уменьшает объем вычислений.
Например, для проверки усилий в стержнях 2, 3, 4 проведем сечение II–II через эти стержни и рассмотрим равновесие правой части фермы (рис. 7.10). Система сил – плоская произвольная. Неизвестных – 3 (S2, S3, S4). Условия равновесия: ΣМN = 0, ΣМD = 0, ΣМC = 0.
Уравнения равновесия:
ΣМN = P1·cos β·a + P1·sin β·ho – S4·h4 = 0 ; (7)
ΣМD = P1·cos β·6a + P1·sin β·6a·tg α + S3·h3 = 0 ; (8)
ΣМC = P1·sin β·6a·tg α + S2·6a·sin α = 0. (9)
Решая уравнения (7), (8), (9), определяем S2, S3, S4.
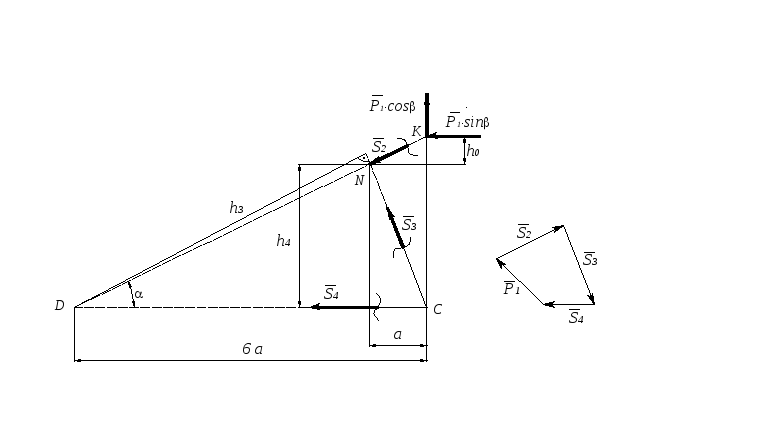
Рис. 7.10 Рис.7.11
Построив силовой многоугольник для отрезанной части фермы, проверяем равенство нулю главного вектора приложенной к ней системы сил (рис. 7.11).
Для определения усилий в стержнях 6, 7, 8 проводим сечение IV–IV и т.д.