Тема 8. Методи системного аналізу.
Сутність та етапи системного аналізу. Принципи оптимізації технічних систем; формування цільової функції. Аналітична оптимізація об’єкту досліджень; необхідні та достатні умови існування екстремуму. Пошукові методи оптимізації.
Системний аналіз – це сукупність прийомів та методів дослідження складних об’єктів та систем, які являють собою комбінацію взаємодіючих елементів. Взаємодія елементів системи характеризується прямими та зворотними зв’язками. Сутність системного аналізу полягає у виявленні цих зв’язків і встановленні їх впливу на поведінку всієї системи в цілому. В системному аналізі широко використовують методи кібернетики, науки про складні динамічні системи, які здатні сприймати, зберігати та переробляти інформацію з метою оптимізації та управління. Системний аналіз складається з 4 етапів.
1. Постановка задачі. На цьому етапі визначають об'єкт, цілі і задачі дослідження, критерії для вивчення об’єкту і управління ним. Невірна або неповна постановка цілей може зробити малоцінними або навіть непотрібними результати усього наступного аналізу.
2. Вивчення границь системи, що вивчається, та її структури. Всі об’єкти і процеси, які мають відношення до поставленої цілі, розбивають на 2 класи – власно систему, що вивчається, і зовнішнє середовище. Розрізняють замкнені та відкриті системи. При дослідженні замкнених систем впливом зовнішнього середовища на їх поведінку нехтують. На цьому етапі виділяють елементи системи, встановлюють взаємодію між ними, а для відкритої системи – з зовнішнім середовищем.
3. Складання математичної моделі системи. На цьому етапі спочатку виконують параметризацію системи, роблять опис виділених елементів і дії на систему за допомогою різних параметрів: неперервних, дискретних, детермінованих, імовірнісних. В залежності від особливостей процесів використовують відповідний математичний апарат – аналітичні методи, методи дослідження операцій, імовірнісні методи і т. д. В результаті третього етапу формується модель системи на формальній, зокрема на алгоритмічній, мові.
4. Аналіз отриманої математичної моделі, визначення оптимальних умов реалізації процесів і управління системою, формулювання висновків.
Оптимізація – це цілеспрямована діяльність на отриманню найкращих результатів за відповідних умов. Тобто, оптимальне – це можливо найкраще в конкретних умовах. Під оптимальним об’єктом або системою розуміють такі, яким тим або іншим способом надані найкращі якості в якому–небудь визначеному розумінні.
Задачі оптимізації – це задачі вишукування точок мінімумів або максимумів функцій на заданих множинах. Задачі оптимізації технічного об’єкту вирішуються як на стадії його розробки, так і під час експлуатації.
Постановка задачі оптимізації взагалі має сенс лише в разі, якщо є необхідність вибирати один з конкуруючих варіантів при обмеженості ресурсів. Технічний об’єкт або система завжди працюють в умовах жорстких обмежень на матеріальні, енергетичні, часові та інші види ресурсів. Вибір виконується з урахуванням правил переваги, в основі побудови яких лежить цільова функція.
Цільова функція – це показник, який кількісно відображує якість об’єкта в математичній формі. Вона ще називається критерієм оптимальності. Формування цільової функції виконується з урахуванням вихідних параметрів об’єкта. В залежності від умов якість об’єкта буде тим вищою, чим більше її значення (це задача максимізації) або чим менше (задача мінімізації). Оскільки вибір цільової функції носить суб’єктивний характер, тому об’єкт може бути оптимальним тільки в розумінні даного критерію.
Якість роботи будь – якої системи або об’єкту характеризується множиною вихідних параметрів або їх вектором У = (у1, у2,…, ук). Частину вихідних параметрів можна виміряти кількісно (кількісні параметри), а частину – лише якісно (якісні параметри). Під вектором У, який використовується для формування цільової функції, розуміють лише кількісні параметри.
Деякі внутрішні параметри системи призначаються і не підлягають зміні. Наприклад, це параметри уніфікованих елементів; параметри, які заздалегідь задані. Інші параметри можна змінювати, вибирати. Внутрішні параметри, значення яких можуть змінюватися в процесі оптимізації і які є аргументами цільової функції, називають керованими параметрами.
Якщо в об’єкті є n керованих параметрів, то вони утворюють вектор Х = (х1, х2,…, хn). Позначимо цільову функцію через F(X), а область її визначення через ХВ. Вектор Х визначає координати точки в області визначення ХВ. Якщо елементи вектора Х приймають тільки дискретні значення, то ХВ є дискретною множиною точок і задача оптимізації відноситься до області дискретного програмування. Більшість задач параметричної оптимізації вирішуються з неперервними параметрами. Якщо екстремум цільової функції шукають в необмеженій області ХВ, то його називають безумовним, а методи пошуку – методами безумовної оптимізації.
Дамо класичне визначення екстремуму, для чого наведемо спочатку поняття ε – околиці точки. ε – околицею точки Хр називають множину Sε(X) точок (векторів), які знаходяться від точки Хр на відстані, яка не перевищує задане число ε > 0:
 ,
,
де
 - норма вектора Х – Хр,
яка є тотожною відстані між точками Х
і Хр.
- норма вектора Х – Хр,
яка є тотожною відстані між точками Х
і Хр.
Екстремумам
функції F(X) називають
таке значення F(X*),
коли для будь – якої точки Х
 Sε(X*)
при достатньо малому ε > 0, за виключенням
самої точки Х*,
виконується нерівність:
Sε(X*)
при достатньо малому ε > 0, за виключенням
самої точки Х*,
виконується нерівність:
-
F(X) – F(X*) < 0 для максимуму;
-
F(X) – F(X*) > 0 – для мінімуму.
Точку Х* називають точкою локального екстремуму.
Глобальним екстремумом називають точку, в який цільова функція має найбільше (або найменше) значення серед всіх локальних екстремумів області визначення.
Функцію F(X) називають одноекстремальною або унімодальною , якщо вона має один екстремум, і багатоекстремальною, якщо вона має більше, ніж один максимум (мінімум). Відповідно, існують одно – та багатоекстремальні задачі оптимізації.
Аналітична оптимізація передбачає використання необхідних та достатніх умов існування екстремуму цільової функції F(Х). Для цього необхідно, щоб цільову функцію векторного аргументу Х розмірності n можна було не менш, ніж двічі диференціювати.
Необхідною
умовою наявності екстремуму
в деякий точці Х*
= (х1*,
х2*,
…., хn*)
є рівність нулю всіх часткових похідних
цільової функції за незалежними
параметрами:

 ……;
……;
 .
.
Характер екстремуму функції в стаціонарній точці визначають за матрицею других похідних цільової функції (матриця Гесе або гесиан). Ознакою досягнення мінімуму цільової функції в цій точці є позитивність гесиану функції і всіх його кутових мінорів, а для максимуму – негативність їх.
Це достатня умова існування екстремуму.
Розглянемо приклади одно – та багатовимірної оптимізації з застосуванням необхідних і достатніх умов існування екстремуму.
Приклад
1. Зі
зростанням продуктивності технологічного
агрегату Р,
 ,
кількість шкідливих речовин, які
викидаються в атмосферу, зростає за
залежністю: М = 5е0,2Р,
,
кількість шкідливих речовин, які
викидаються в атмосферу, зростає за
залежністю: М = 5е0,2Р,
 .
Визначити оптимальну за питомими
викидами шкідливих речовин продуктивність
агрегату.
.
Визначити оптимальну за питомими
викидами шкідливих речовин продуктивність
агрегату.
Рішення.
Критерієм оптимальності в даному випадку
є питомі викиди шкідливих речовин з
агрегату, які треба мінімізувати: F(P) =
 .
.
Для визначення екстремальної точки візьмемо першу похідну сформованої цільової функції:
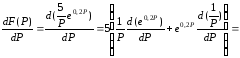 .
.

В
точці екстремуму
 ,
звідки знаходимо значення Р в ній:
,
звідки знаходимо значення Р в ній:
Р*
=
 = 5
= 5
 .
.
Для
визначення виду екстремуму знайдемо
другу похідну цільової функції і її
значення в цій точці:
 ;
;
 .
.
Позитивність
другої похідної свідчить про досягнення
мінімуму цільової функції в знайденій
точці екстремуму. Таким чином, при
продуктивності агрегату Р*
= 5
 кількість шкідливих викидів з агрегату
в атмосферу у розрахунку на тону
продукції, що випускається, буде
мінімальною і становить:
кількість шкідливих викидів з агрегату
в атмосферу у розрахунку на тону
продукції, що випускається, буде
мінімальною і становить:
F(P*)
=
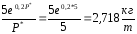 .
.
Приклад
2.
Експериментально встановлено, що
залежність кількості викидів пилу та
газів з агрегату F,
 від параметрів технологічного процесу
х1,
х2,
х3
має вигляд: F(х1,
х2,
х3) =
від параметрів технологічного процесу
х1,
х2,
х3
має вигляд: F(х1,
х2,
х3) =
 .
Виконати дослідження можливості
мінімізації викидів пилу та газів за
рахунок вибору оптимального співвідношення
параметрів технології.
.
Виконати дослідження можливості
мінімізації викидів пилу та газів за
рахунок вибору оптимального співвідношення
параметрів технології.
Рішення.
Знайдемо часткові похідні цільової
функції F за керованими параметрами
технології:
 ;
;
 ;
;
 .
.
Прирівняємо знайдені часткові похідні нулю і визначимо координати точки екстремуму зі сформованої системи рівнянь:
 ;
;
 ;
;
 ;
х1*
=
;
х1*
=
 ;
х3*
= х2*
= 2х1*
= 1.
;
х3*
= х2*
= 2х1*
= 1.
Для визначення характеру екстремуму знаходимо другі часткові похідні цільової функції і їх значення у визначеній точці:
 ;
;

 ;
;

 ;
;
 ;
;

 ;
;
 ;
;
 ;
;

 ;
;

 ;
;

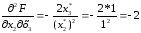 ;
;
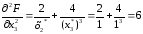 .
.
Матриця других похідних цільової функції (гесіан):
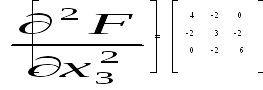
Кутовий мінор першого порядку:
Δ1 = 4 > 0
Кутовий мінор другого порядку:
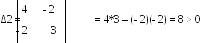
Визначник матриці:

Зважаючи
на позитивність кутових мінорів і
гесіану, можна зробити висновок, що при
параметрах технології х1*
=
 ;
х3*
= х2*
= 1 досягається мінімум викидів пилу та
газів на рівні:
;
х3*
= х2*
= 1 досягається мінімум викидів пилу та
газів на рівні:
F(х1*,
х2*,
х3*)
=
 = 4
= 4 .
.
Вихідне формулювання задачі оптимізації має, як правило, мовний опис. Процес оптимізації включає два етапи:
- постановка задачі, тобто формалізація поняття “оптимальний”;
- рішення задачі.
Постановка задачі включає вибір цільової функції і керованих параметрів, призначення обмежень, нормування керованих і вихідних параметрів. Основну проблему постановки задачі містить формулювання цільової функції. Складність полягає у тому, що технічний об’єкт володіє властивістю багатокритеріальності, тобто, має декілька критеріїв оптимальності. Вихідні параметри є функціями одних і тих же керованих параметрів і не можуть змінюватися незалежно один від одного. Покращення одного з вихідних параметрів , як правило, призводить до погіршення іншого. Такі вихідні параметри називають конфліктними або конкуруючими.
Для рішення задачі оптимізації повинен дотримуватися принцип однозначності, тобто цільова функція повинна бути одна. Зведення багатокритеріальної задачі до однокритеріальної називають згорткою векторного критерію. В залежності від того, як здійснюється вибір і об/єднання вихідних параметрів, тобто, як виконується згортка векторного критерію, розрізняють часткові, адитивні, мультиплікативні, мінімаксні, статистичні критерії.
Часткові критерії використовують, якщо з вихідних параметрів можна вибрати один провідний уі(Х), який найбільш повно відображує ефективність роботи об’єкта. Наприклад, потужність, продуктивність, питома витрата енергоресурсів або сировини, викиди шкідливих речовин і т. д. На всі інші вихідні параметри накладають обмеження. Перевагою оптимізації за частковим критерієм є простота його формування.
Для
формування зваженого
адитивного критерію
виділяють дві групи вихідних параметрів.
До першої входять параметри, значення
яких треба збільшувати уj+(X)
(наприклад, продуктивність, потужність
тощо), а до другої – параметри, значення
яких треба зменшувати уj-(X)
(наприклад, питома витрата сировини або
енергоносіїв, викиди шкідливих речовин
тощо). Об/єднання
цих параметрів в одну цільову функцію
(згортка векторного критерію) має вигляд
адитивного критерію:
 ,
де аj
> 0 - ваговий коефіцієнт,
який визначає важливість j – того
параметра серед інших і призначається
дослідником.
,
де аj
> 0 - ваговий коефіцієнт,
який визначає важливість j – того
параметра серед інших і призначається
дослідником.
Мультиплікативний критерій у випадку мінімізації має вигляд:

Максимінні (мінімаксні) критерії дозволяють отримати найкращій результат за найгірших можливих умов. Прикладом може служити досягнення найкращого задоволення умов працездатності системи.
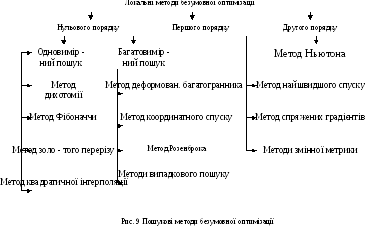
Точне аналітичне рішення задачі оптимізації можливо лише в окремих випадках для досить простих об’єктів. Найбільш часто, особливо для складних систем, застосовують пошукові методи оптимізації (рис. 9).